Вопросы по iNav

Сбил с толку ролик у одного обзорщика, он пояснял что градусы должны быть 0 направление на север и надпись ФРОНТ
Если вы поставите физическую модель носом в экран, задом к себе, то при первоначальном запуске конфигуратора 3D-модель на экране будет стоять в таком же положении и показывать на ноль.
При работе в конфигураторе эти показания постепенно сбиваются и уплывают. То есть может оказаться так, что ваша модель смотрит в одну сторону, а модель на экране - в другую. В этом случае вы можете там рядом с 3D-моделью нажать нажать на кнопку Reset и 3D-модель встанет опять задом к вам и показания скинутся на 0.
Полная синхронизация поворотов физической и 3D-модели возможна только при подключенном и правильно откалиброванном и сконфигурированном компасе.
Собрал мелкий квадрик моторки Readytosky 1103 7800kv, написано поддерживают 3S аккум.
До этого взял 2S, и как-то тормознуто летает.
Подключил БП выставил напругу 12.6 моторы работают.
Взял аккум 3S пошёл полетать, воткнул аккум, квадрик пищит постоянно и показания OSD не работают.
Пришёл домой, начал смотреть почему пищит, но не фига не понял.
В INAV стоит автоматическое определение количества банок аккумулятора 0, поставил принудительно 3 банки, все равно пищит.
Но, если сначала подать питание 8.4V, а затем поднять напряжение до 12.6V то квадрик нормально работает.
Можно отключить БП, сразу же воткнуть аккум 3S и с всё работает нормально
Но, если отключить питание и подождать 1-2 минуты и заново подключить аккум 3S, квадрик опять пищит постоянно и не показывает OSD.
И ещё вопрос как правильно рассчитать потребление и указать в INAV, чтобы он правильно показывал силу тока и ваты?
Ну вот видимо почему оно пищит. При подключении 3S аккумулятора, квадрик начинает как бы крутиться в INAV с чем это связано?
моторки Readytosky 1103 7800kv, написано поддерживают 3S аккум
Скорее всего моторки не причем. Смотрите по питанию остальные элементы - ESC, контроллер, FPV передатчик, на какое напряжение рассчитаны. Где-то косяк.
Удержание высоты по баро это navalthold во вкладке Modes? почему он может не работать? На inav 1.9. с модулем Radiolink TS100 все прекрасно включалось тумблером и вроде даже на контроллере какой-то светодиод срабатывал, сейчас на inav 2.4.0 без модуля TS100 не как хочет включатся удержание высоты и на контроллере не как не проявляется включение тумблера?
Удержание высоты по баро
“nav althold” ни какого отношения к TS100 не имеет. TS100 это модуль GPS и Compas(“nav poshold”). Во вкладке config посмотрите определился ли “баро”.
Скорее всего моторки не причем. Смотрите по питанию остальные элементы - ESC, контроллер, FPV передатчик, на какое напряжение рассчитаны. Где-то косяк.
Полетник + ESC такого плана, Flytower F4
Питание на полетнике 4,88V и при 2S и при 3S
На полетнике стоит BEC, так что тут не в этом дело.
OSD на борту полетника. Причем если видео смотрели, то там видно что по питанию оно всё работает от 3S если подавать не сразу, а поднимать напряжение от 8,4 до 12,6
Передатчик каким боком виноват?)
Оно всё на 5v запитано, камера, передатчик, приемник.
Видео передает отлично VTX не подключен.
Попробую конечно от внешнего бэка запитать.
Ну в общем разобрался в чём косяк, питание идёт с батарейки на BEC полётника, а значит он какой-то косячный.
Причём если подать 11V то всё работает отлично, а вот чуть больше уже начинает тупить
питание идёт с батарейки на BEC полётника, а значит он какой-то косячный
Еще раз пересмотрел ваше видео. Обратите внимание на показания напряжения (бортовое я так понимаю). При плавном повышении от бп оно выше 6в, а при подключении ака - 4в.
Ну вот видимо почему оно пищит. При подключении 3S аккумулятора, квадрик начинает как бы крутиться в INAV с чем это связано?
5 коротких бипов + 2 длинных = Accelerometer/gyro sensor is missing.
Полетник + ESC такого плана, Flytower F4
Ссылка в никуда, увы. Питание 3S заявлено?
Причём если подать 11V то всё работает отлично, а вот чуть больше уже начинает тупить
При запуске от 3S отваливаются гиро/аксель и дальше система не инициализируется. До OSD не доходит.
Обратите внимание на показания напряжения (бортовое я так понимаю). При плавном повышении от бп оно выше 6в, а при подключении ака - 4в.
Это расчётное напряжение одной банки акка. А кол-во банок определяется при старте ПК. Думаю дальше понятно.
Странный полётник, он напряжение измеряет не через current (а вот оно чё его тут нет в регуляторе), а через себя, беря напряжение с бэка.
Как быть, даже не знаю. На 2S меня совсем не устраивает летать.
Еще раз пересмотрел ваше видео. Обратите внимание на показания напряжения (бортовое я так понимаю). При плавном повышении от бп оно выше 6в, а при подключении ака - 4в.
Это не бортовое питание, это расчёт сколько вольт на банку, так как подключаю я как бы 2S а потом повышаю напряжение, он думает что банка выше по напряжению.
На это смотреть не надо. Полётник работает от 11V нормально. Тем самым определяет как 3S но почему он не работает от 12.6V мне пока не понятно.
5 коротких бипов + 2 длинных = Accelerometer/gyro sensor is missing.
Ссылка в никуда, увы. Питание 3S заявлено?
Регуль заявлен как 2S-4S
А вот полётник 2S видимо…
Ссылки на мобильное приложение)
Вот на сайт Flytower F4
PS. Надо видимо и регуль другой и полётник. Ну китайцы… подстава.
А может как вариант обмануть полётник, через диоды понизить напряжение до 11, а расчёт на банку поменьше сделать до 2.4-2.5V ?! Я так думаю)))
А вот полётник 2S видимо…
Собирал по осени вот такойru.banggood.com/Eachine-Tyro79-140mm-3-Inch-DIY-Ve…
Но полетник заменил на другой, от 3S работает
aliexpress.ru/item/32995826291.html?spm=a2g0o.prod…
PS По ссылке на али в описании рекомендуют “Управление полетом используется для сборки около 80-90 небольших валов, мотор выбирает 1104 7500KV, а батарея составляет около 2 S 400-500 MAH”
полетник заменил на другой, от 3S работает
aliexpress.ru/item/32995826291.html?spm=a2g0o.prod…
На мою раму не влезет 25мм, я на своем полетнике даже углы сточил, пропы цепляли)
А там на странице действительно 2S, но оно так медленно и убого летает, явно мощи не хватает.
Вчера написал продавцу, спрашиваю не работает 3S на полётнике? А он говорит, работает…
Нашёл в ютубе видео где чел подключает аккумулятор явно больше чем 2S
Почесал репу, вспомнил про то как у меня при подключении передатчика, сгорел диод S4, а я вместо него поставил светодиод, в паял и т.к. тогда был только 2S аккум проверил, всё работает…
В общем не дало мне это покоя, сегодня полез по закромам и нашел SS14 диод, впаял на проводочках, подключил, заводится квадрик, но до арма не доходит, зависает.
Вот теперь думаю не ужели S4 диод ему надо?!
www.youtube.com/watch?v=wFL2JqKUqXI
PS. Теперь квадрик заводится при 12.16V а если напряжение больше то виснет.
Поясните пожалуйста , зачем Спичальский выставил расходы серв 50% язык не знаю . Смотреть с 3,15 минуты
Опять засрали 2 страницы текстом к inav абсолютно не относящемся. Конечно приятно в одном месте с единомышленниками общаться, но уважайте и других. По теме то - ноль.
Поясните пожалуйста
Александр, Спихальского уже обсудили ведь не раз. Тут мало кто понимает (я в том числе) его движения (он своеобразный человек).
Что может быть, бузер орет при включении питания, мотор не армится, спутники поймал, все режимы в конфигураторе переключаются, напряжение норм.
Что может быть
В CLI подать команду status. Результат сюда.
Вчера работало нормально.
на всякий случай сделал еще скрин с подключенным питанием 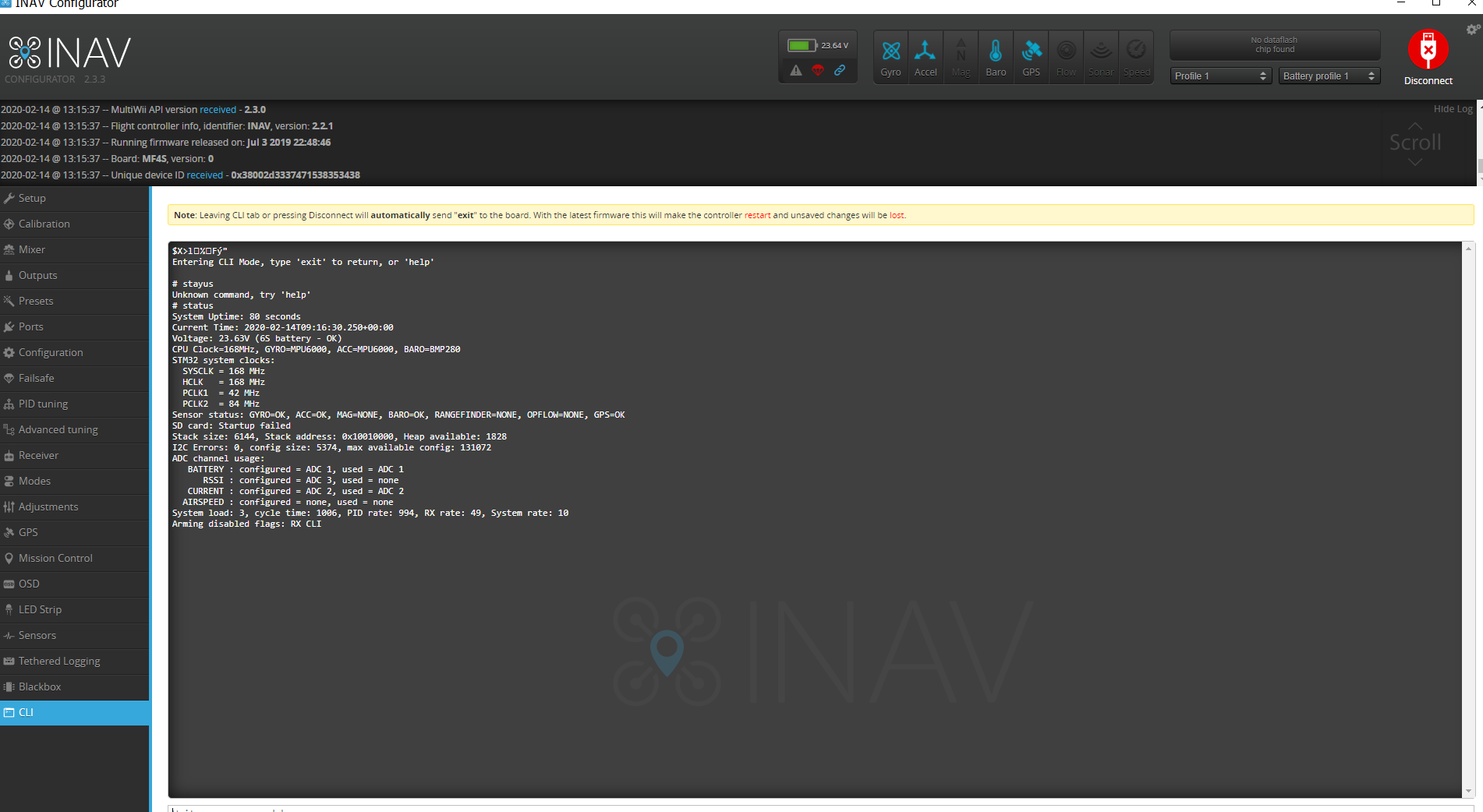
Вчера работало нормально.
И сегодня всё работает у вас. GPS без батареи у вас не работает, вот и ругается на HWFAIL.
Для проверки, например, - отключите программно GPS (в конфигураторе) и посмотрите будет пищать или нет.
И приемника он не видит у вас.
Даже режим FS ведь показывает.
Расшифровка почему например может не армится :
Arming disabled reasons
iNav will refuse to arm for the following reasons:
Reason (CLI
Mnemonic) Explanation
FS The RX is not recognised as providing a valid signal
ANGLE The vehicle is not level as defined by the CLI small_angle setting
CAL The pre-arm sensor calibration has not completed
OVRLD
The CPU load is excessive. May be caused by too an aggressive loop time
setting.
NAV Where the CLI setting nav_extra_arming_safety = ON is used, this may
be caused by reasons shown in the table below
COMPASS The compass is not calibrated. Perform the calibration procedure
ACC The accelerometer is not calibrated. Perform the 6 point calibration
procedure
ARMSW The arm switch was engaged as the FC booted
HWFAIL
A required hardware device has failed / is not recognised (e.g. GPS,
Compass, Baro)
BOXFS A failsafe switch is engaged
KILLSW A kill switch is engaged
RX The RC link is not detected (RX not detected)
THR The throttle setting is not a minimum
CLI The CLI is active
CMS The CMS menu is active
OSD The OSD menu is active
ROLL/PITCH Roll and/or pitch is not centred
AUTOTRIM Servo autotrim is engaged
OOM The FC is out of memory
GPS отключил и настройки сохранил, один фик пищит, что интересно при Арм никаких предупреждений нет. F\S из за того что подключил без пульта, до этого включение все работало и элероны и режимы переключались нормально. Это я описываю сегодняшний день когда уже пищал бузер