Вопросы по iNav

Опять засрали 2 страницы текстом к inav абсолютно не относящемся. Конечно приятно в одном месте с единомышленниками общаться, но уважайте и других. По теме то - ноль.
Поясните пожалуйста
Александр, Спихальского уже обсудили ведь не раз. Тут мало кто понимает (я в том числе) его движения (он своеобразный человек).
Что может быть, бузер орет при включении питания, мотор не армится, спутники поймал, все режимы в конфигураторе переключаются, напряжение норм.
Что может быть
В CLI подать команду status. Результат сюда.
Вчера работало нормально.
на всякий случай сделал еще скрин с подключенным питанием 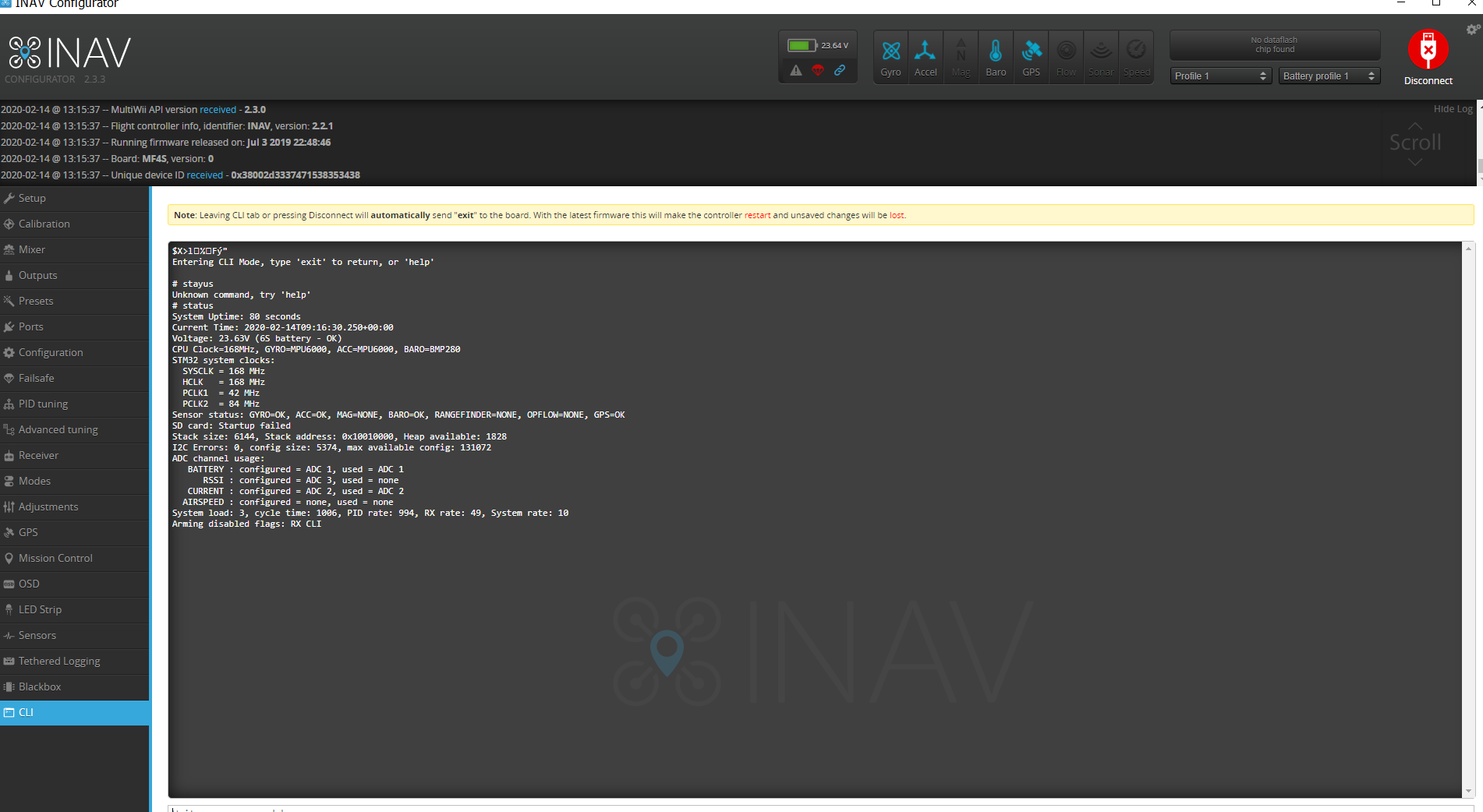
Вчера работало нормально.
И сегодня всё работает у вас. GPS без батареи у вас не работает, вот и ругается на HWFAIL.
Для проверки, например, - отключите программно GPS (в конфигураторе) и посмотрите будет пищать или нет.
И приемника он не видит у вас.
Даже режим FS ведь показывает.
Расшифровка почему например может не армится :
Arming disabled reasons
iNav will refuse to arm for the following reasons:
Reason (CLI
Mnemonic) Explanation
FS The RX is not recognised as providing a valid signal
ANGLE The vehicle is not level as defined by the CLI small_angle setting
CAL The pre-arm sensor calibration has not completed
OVRLD
The CPU load is excessive. May be caused by too an aggressive loop time
setting.
NAV Where the CLI setting nav_extra_arming_safety = ON is used, this may
be caused by reasons shown in the table below
COMPASS The compass is not calibrated. Perform the calibration procedure
ACC The accelerometer is not calibrated. Perform the 6 point calibration
procedure
ARMSW The arm switch was engaged as the FC booted
HWFAIL
A required hardware device has failed / is not recognised (e.g. GPS,
Compass, Baro)
BOXFS A failsafe switch is engaged
KILLSW A kill switch is engaged
RX The RC link is not detected (RX not detected)
THR The throttle setting is not a minimum
CLI The CLI is active
CMS The CMS menu is active
OSD The OSD menu is active
ROLL/PITCH Roll and/or pitch is not centred
AUTOTRIM Servo autotrim is engaged
OOM The FC is out of memory
GPS отключил и настройки сохранил, один фик пищит, что интересно при Арм никаких предупреждений нет. F\S из за того что подключил без пульта, до этого включение все работало и элероны и режимы переключались нормально. Это я описываю сегодняшний день когда уже пищал бузер
Самая частая причина писка это перезаряд, либо подкорректировать множитель, либо поднять максбат или как там его до 4.4в
Это? Увеличил один х пищит. Наверное сделать сброс и по новой все настраивать.
4,4
Maximum cell voltage for cell count detection
Гляньте может я что наворчал в настройках ,
Вывод командой. diff прошу прощения как спрятать под спойлер не знаю
# giff
Unknown command, try ‘help’
# diff
# version
# INAV/MATEKF405SE 2.2.1 Jul 3 2019 / 22:48:46 (a6d847482)
# GCC-8.2.1 20181213 (release) [gcc-8-branch revision 267074]
# resources
# mixer
# servo mix
smix 0 3 0 80 0 -1
smix 1 4 0 -80 0 -1
smix 2 3 1 -80 0 -1
smix 3 4 1 -80 0 -1
# servo
servo 3 1200 1800 1500 100
servo 4 1200 1800 1500 100
# logic
# feature
feature -VBAT
feature MOTOR_STOP
feature GPS
feature PWM_OUTPUT_ENABLE
# beeper
# map
# serial
serial 3 2 115200 115200 0 115200
# led
# color
# mode_color
# aux
aux 0 0 0 1650 2100
aux 1 1 1 1675 2100
aux 2 3 2 1650 2075
aux 3 9 2 1300 1700
aux 4 8 3 1700 2100
aux 5 35 2 1675 2100
aux 6 10 1 925 1300
aux 7 14 4 1700 2100
aux 8 27 5 1700 2100
aux 9 28 6 1725 2100
# adjrange
# rxrange
# temp_sensor
# wp
#wp 0 invalid
# osd_layout
osd_layout 0 0 23 0 H
osd_layout 0 1 24 9 V
osd_layout 0 2 0 0 V
osd_layout 0 4 8 6 H
osd_layout 0 6 23 3 V
osd_layout 0 9 10 3 V
osd_layout 0 11 25 11 V
osd_layout 0 12 23 13 V
osd_layout 0 13 3 7 V
osd_layout 0 14 2 4 V
osd_layout 0 15 3 8 V
osd_layout 0 20 1 1 V
osd_layout 0 21 14 1 V
osd_layout 0 22 14 8 V
osd_layout 0 23 13 5 V
osd_layout 0 25 23 5 V
osd_layout 0 26 18 10 V
osd_layout 0 28 19 2 H
osd_layout 0 30 2 14 V
osd_layout 0 32 25 5 V
osd_layout 0 35 1 12 V
osd_layout 0 86 23 4 H
osd_layout 0 96 3 6 V
# master
set acc_hardware = MPU6000
set acczero_x = 74
set acczero_y = 20
set acczero_z = -104
set accgain_x = 4094
set accgain_y = 4075
set accgain_z = 4015
set mag_hardware = NONE
set baro_hardware = BMP280
set pitot_hardware = NONE
set failsafe_procedure = RTH
set align_board_yaw = 1800
set model_preview_type = 8
set small_angle = 180
set gps_sbas_mode = AUTO
set nav_extra_arming_safety = OFF
set nav_auto_speed = 2000
set nav_manual_speed = 2000
set nav_land_slowdown_minalt = 1000
set nav_rth_altitude = 10000
set nav_fw_cruise_thr = 1500
set nav_fw_climb_angle = 35
set nav_fw_loiter_radius = 7000
set nav_fw_launch_thr = 2000
set nav_fw_launch_motor_delay = 150
set nav_fw_launch_spinup_time = 250
set nav_fw_launch_timeout = 15000
set nav_fw_launch_max_altitude = 10000
set osd_video_system = PAL
set osd_dist_alarm = 1
set osd_artificial_horizon_reverse_roll = ON
# profile
profile 1
set fw_p_pitch = 10
set fw_i_pitch = 15
set fw_p_roll = 10
set fw_i_roll = 15
# battery_profile
battery_profile 1
set bat_cells = 6
set vbat_cell_detect_voltage = 440
set vbat_min_cell_voltage = 280
set vbat_warning_cell_voltage = 310
set battery_capacity = 8500
Ну так для проверки отключите контроль напряжения.
Увеличил один х пищит.
Отключал.
Отключал.
Значит колокол звонит бузер пищит не по напряжению.
Братцы ну что может быть? Сделал полный сброс, откалибровал снова настроил, стабилизация работает режимы переключаются, при включении Арм никаких ошибок не показывает, но бузер зараза пищит. Пробовал менял гегуляторы , один фик не стартует
Братцы ну что может быть? Сделал полный сброс, откалибровал снова настроил, стабилизация работает режимы переключаются, при включении Арм никаких ошибок не показывает, но бузер зараза пищит. Пробовал менял гегуляторы , один фик не стартует
У меня такое было когда я отключал контроль тока, хотя датчика тока нет. Пришлось включить обратно. И лучше отключите motor_stop, у меня из-за этой опции один из коптеров в хлам раздолбался.
Ребят, помогите советом.
ПК - matek F405-CTR, приёмник FrSky R-XSR, подключение телеметрии через Fport. Прошивки инав 2.4.0. Радиоаппаратура Джампер Т16, тоже все прошивки последние (stable).
Сегодня обратил внимание, что показание телеметрии запаздывают на 3-5 секунд. Особенное по питчу. В ОСД все отражается нормально и быстро.
Есть matek F722-wing, так там задержка до 1 секунды.
Вроде раньше такого не было, иначе обратил бы внимание, когда первый раз виджет проверял. Но на каком этапе появились тормоза сложно сказать.
Есть какие идеи, как уменьшить задержку?
Братцы ну что может быть? Сделал полный сброс, откалибровал снова настроил, стабилизация работает режимы переключаются, при включении Арм никаких ошибок не показывает, но бузер зараза пищит. Пробовал менял гегуляторы , один фик не стартует
Браузер правильно подключён, контакты не перепутаны?
Бузер подключен + и - но дело не в нем , перестал стартовать мотор, регулятор и мотор проверил напрямую в приемник, все в порядке, ведь работало . Бузер я упомянул как сигнализатор, раньше пропикает и все, сейчас же сразу начинает орать и не выключается.
перестал стартовать мотор
Если арминг есть - мотор обязан стартовать (если он в норме и регулятор нормальный и откалиброван под нужный диапазон).
Бузер я упомянул как сигнализатор, раньше пропикает и все, сейчас же сразу начинает орать и не выключается.
Он не может просто так орать, есть причина раз орет.
может это видео как то поможет, оба регуля калиброванные и оба запускались с этим АП
Бузер подключен + и - но дело не в нем , перестал стартовать мотор, регулятор и мотор проверил напрямую в приемник, все в порядке, ведь работало . Бузер я упомянул как сигнализатор, раньше пропикает и все, сейчас же сразу начинает орать и не выключается.
Сброс настроек, другая версия айнав, бетафлайт, поэтапное отпаивание всего, замена бузерного транзистора, проца. Отпишите на каком этапе заработает.
Ха, особенно отпайка проца меня воодушевила)
Сменю прошивку, может что изменится , если нет придется покупать другой полетник, но блин опят в ждуны…
Стоит прошивка 2,1,1 следующие рабочие?
inav_2.2.1_MATEKF405SE
inav_2.3.0_MATEKF405SE
inav_2.4.0_MATEKF405SE
Ха, особенно отпайка проца меня воодушевила)
Сменю прошивку, может что изменится , если нет придется покупать другой полетник, но блин опят в ждуны…
Стоит прошивка 2,1,1 следующие рабочие?
Например на днях у коллеги после обновления на айнав 2.4

Желание пробовать обнову как-то поубавилось
Например на днях у коллеги после обновления на айнав 2.4
В смысле? Прошивка сломала полетник?