Вопросы по iNav

Вот уже месяц внук рулит Inductrix FPV
никаких баро и компасов
в комнате висит как прибитый
называют это - Технология SAFE
говорят, что гоночная команда Blade готовила настройки
софт закрыт
Что они там могли намудрить?
Что они там могли намудрить?
Ничего… Вообще безмозглый Hubsan H107, предок всех этих супермикро, тоже в комнате висит как прибитый… Правильно рассчитанное отношение тяга/плечо - любимая штука всех(любых) контроллеров… Ну и коллекторные моторы более динамичны.
Что они там могли намудрить?
Ничего, правильный дизайн и выверенный ЦТ. Открыть окна чтобы сквозняк и турбулентность появилась - от “прибитости” и следа не останется.
Люди, верно ли я настроил ФС?
Поясню манипуляции:
В конфигураторе включил в левой колонке “SET” на канал, на котором настроен полётный режим “Домой”, правая колонка не активна.
В передатчике установил ФС (в моём случае на канал 8 задал 100%).
Запустил мотры…упс… оставшийся мотор, типа взлетел, выдернул батарейку с пульта (иначе не выключить) и в конфигураторе увидел включившийся RTH.
Это маленькая творческая победа? 😃
Когда батарею на пульт снова подсоединил и включил, то никакого арминга не потребовалось, но “домой” тут же выключился.
В передатчике установил ФС (в моём случае на канал 8 задал 100%).
А что за аппаратура?
В конфигураторе включил в левой колонке “SET” на канал, на котором настроен полётный режим “Домой”, правая колонка не активна.
Не понял, что сделано. Скриншот есть?
Аппаратура …сейчас…найду буквы… Вот - FlySky FS-i6S 10Ch (в новом симпатиШном дизайне)
А скрин вот такой,
свой не делал:
Здесь слева у меня на аукс4 в режимах установлен “домой”, ну я на него “сет” и назначил. Тоже продублировал и в передатчике. А правая часть отключена (степ2)
А скрин вот такой
А почему у Вас цвета желтые а не синие? Вы случайно не Betaflight конфигуратор используете?
Нет, я же написал, (имел ввиду) что скрин какой попался под руку и ниже дописал, что свой не делал. Настройки то слева точно такие же. Меня смысл сам интересует, а не цвет интерфейса 😃
Меня смысл сам интересует, а не цвет интерфейса
Когда у общества нет цветовой дифференциации интерфейсов, то нет и цели…(©)
Нет, ну на самом деле, когда Вы спрашиваете совета по чему то конкретному, то лучше, таки, делать свои скрины. Очень сложно понять смысл, когда картинка не соответствует тексту…
Как в анекдоте: Пропала собака, похожа на бульдога, только лапы длинные, морда острая и хвост пушистый…)
Блин… я меркантильный, а вы, простите, … тоже не того 😉
Ну какая разница, какого цвета кнопочки? Все данные и закладки точно такие… Думаю всё прекрасно понятно для знающих.
Тем не менее, раз уж так принципиально, вот скрин лично мною только что сделанный. Еще горяченький 😃
:
Сейчас коптер почти весь разобран и не подключен жпс, по этому кнопки с режимом не видно. Ничего, что я вручную дописал (с жпс она там есть)?
Всякие KF, EKF, UKF по сути тот же комплементарник, но с динамической подстройкой коэффициентов. При постоянном и известном шуме от датчиков комлементарник и KF совершенно одинаковы по точности, никакой магии в KF нет, кроме того, что если он глючит, то понять что и куда крутить нереально.
В очень упрощенном виде да, тоже самое, но весь сок там как раз в расчете матрицы динамических корректирущих коэфицинтов и “простой” логикой этого не заменить…
Я в предыдущих релизах пробовал и субьективно даже с успехом. Но да, всего лишь субъективно и без мат. доказательств 😃
// apply Complimentary Filter (CF) with dynamic coef. to keep the calculated velocity based on baro velocity (i.e. near real velocity).
// By using CF it's possible to correct the drift of integrated accZ (velocity) without loosing the phase, i.e without delay
float dynK = 0.020f - min(abs(accZ)/15000.0f, 0.010f);
vel = vel * (1.0f - dynK) + sensorVel * dynK;
// attempts to get "rapid" alt...
// Integrator - altitude, cm
alt += vario * dTime;
// apply CF with dynamic coefficient to keep the calculated altitude near real baro/sonar altitude
dynK = 0.025f - min(abs(vario)/2000.0f, 0.015f);
alt = alt * (1.0f - dynK) + sensorAlt * dynK;
Блин… я меркантильный, а вы
А я педантичный… Вы еще с Шурикусом не сталкивались…)
Думаю всё прекрасно понятно для знающих
А Вы не думайте… Пишите все как для идиотов. Я полчаса втыкал почему у Вас включен дроп вместо ландинга, но при этом Вы пишете, что степ2 отключен… Я то вижу, что он включен…)
А приписку мелким текстом на обратной стороне(Вы случайно в кредитных или страховых организациях не работали?) я не сразу увидел… )
Но теперь то, все всё увидели и? Верно я настроил, можно отпускать дитя в небо?
п.с.
Вы случайно в кредитных или страховых организациях не работали?
К сожалению нет… ) Это просто сначала текст набирал, потом воткнул скрин, вот и съехало.
Еще вопрос (в новичках игнорируют) по теме: Почему дата журнала чёрного ящика 15 года? 1.12.2015 B так все файлы. Может жпс должен время и дату давать но не даёт? Если так, то как победить?
Подскажите,ПК SPR F3,баро MS5611 имеет дрейф.Это видно в конфигураторе(а в полёте трудно высоту держать т.е.он её совсем не держит в режиме альтхолд),за 3мин после подключения с 0 до 3 метров “поднимается”(всё на столе при неизменной температуре).ПК "одет"в родную пластмассу,баро заткнут поролоном.Прошивка 1.1.0. Его под-замену или чот не понажимал в настройках.И как считаете,если прикрутить по И2Ц ,параллельно с компасом,внешний ВМР280,то много хуже будет?
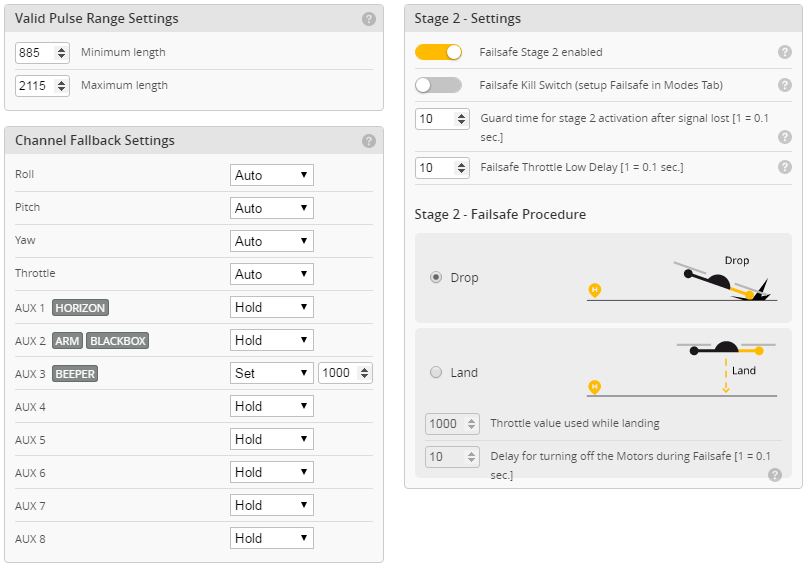
Вопрос по failsafe. С настройкой “Guard time for stage 2 activation” всё ясно. Кстати, какое оптимальное значение?
Но совсем непонятно что делает “Failsafe Throttle Low Delay”. Единственное, что пришло в голову, что этот параметр используется только если в Failsafe Procedure выбрано Land. Верно или нет?
И ещё: есть ли разница выбрать в Failsafe Procedure “Return to Home” или эмулировать включение этого режима в Channel Fallback?
Приветствую всех. Особую благодарность выражаю Константину и его коллегам по разработке проекта iNAV. Прочитал всю ветку, но так и не нашел ответа на вопрос.
У меня Naze 32 rev.5 и GPS чип MT3333. До того как прочитал всю ветку была установлена iNAV 1.2.1 и GPS в ней работал, но только на скорости 9600 и частоте обновления 1Гц. Пробовал и другую скорость и частоту - не работало, только 9600 на 1Гц. Сейчас установил iNAV 1.3 - GPS чип не видно.
3D Fix есть (подпаян светодиод и подключен маяк), координаты определяет нормально, а вот в iNAV конфигураторе не видится. Чип с протоколом NMEA. Также в числе поддерживаемых чипа нет.
Читал также что памяти в CC3D на NMEA не хватило, но про Naze 32 упоминания не нашел.
Вот кусочек Dump:
# dump
# version
# INAV/NAZE 1.3.0 Nov 2 2016 / 11:11:52 (479d607)
# pflags
# Persistent config flags: 0x00000000
# dump master
# mixer
mixer QUADX
mmix reset
smix reset
# feature
feature -RX_PPM
feature -VBAT
feature -UNUSED_1
feature -RX_SERIAL
feature -MOTOR_STOP
feature -SERVO_TILT
feature -SOFTSERIAL
feature -GPS
feature -FAILSAFE
feature -SONAR
feature -TELEMETRY
feature -CURRENT_METER
feature -3D
feature -RX_PARALLEL_PWM
feature -RX_MSP
feature -RSSI_ADC
feature -LED_STRIP
feature -DISPLAY
feature -UNUSED_2
feature -BLACKBOX
feature -CHANNEL_FORWARDING
feature -TRANSPONDER
feature -AIRMODE
feature -SUPEREXPO
feature -VTX
feature -RX_SPI
feature -SOFTSPI
feature -PWM_SERVO_DRIVER
feature RX_PPM
feature VBAT
feature MOTOR_STOP
feature GPS
feature FAILSAFE
# beeper
beeper GYRO_CALIBRATED
beeper RX_LOST
beeper RX_LOST_LANDING
beeper DISARMING
beeper ARMING
beeper ARMING_GPS_FIX
beeper BAT_CRIT_LOW
beeper BAT_LOW
beeper GPS_STATUS
beeper RX_SET
beeper ACC_CALIBRATION
beeper ACC_CALIBRATION_FAIL
beeper READY_BEEP
beeper MULTI_BEEPS
beeper DISARM_REPEAT
beeper ARMED
beeper SYSTEM_INIT
beeper ON_USB
# map
map AETR1234
# serial
serial 0 1 115200 38400 0 115200
serial 1 2 115200 9600 0 115200
set looptime = 2000
set i2c_overclock = OFF
set gyro_sync = OFF
set gyro_sync_denom = 2
set mid_rc = 1500
set min_check = 1100
set max_check = 1900
set rssi_channel = 0
set rssi_scale = 30
set rssi_ppm_invert = OFF
set rc_smoothing = ON
set input_filtering_mode = OFF
set min_throttle = 1050
set max_throttle = 1850
set min_command = 1000
set 3d_deadband_low = 1406
set 3d_deadband_high = 1514
set 3d_neutral = 1460
set 3d_deadband_throttle = 1000
set motor_pwm_rate = 400
set motor_pwm_protocol = STANDARD
set fixed_wing_auto_arm = OFF
set disarm_kill_switch = ON
set auto_disarm_delay = 10
set small_angle = 25
set reboot_character = 82
set gps_provider = NMEA
set gps_sbas_mode = NONE
set gps_dyn_model = AIR_1G
set gps_auto_config = ON
set gps_auto_baud = ON
баро заткнут поролоном.Прошивка 1.1.0
А почему версия не 1.3 (stable) ?
А почему версия не 1.3 (stable) ?
Лень(боюсь))) )перенастраивать.Как понимаю нельзя тупо скопировать настройки.
Читал также что памяти в CC3D на NMEA не хватило, но про Naze 32 упоминания не нашел.
С Naze32 тоже самое, платформа то одна. GPS работает только по протоколу UBLOX.

Если есть навыки, то можно пересобрать свою собственную прошивку, отключив ненужные и включив интересующие модули.
Лень(боюсь))) )перенастраивать.Как понимаю нельзя тупо скопировать настройки.
Тупо скопировать можно, но на версии 1.2 был изменен коэффициент, применяемый к значениям ПИДов. Поэтому ПИДы придется настраивать по-новой, а так же настраивать те фичи, которые появились в последующих версиях после 1.1.
Наконец-то получил барометр BMP280 и… жизнь стала сразу сложнее и непонятнее. Подключал его к порту I2C (ПК SPFracingF3) параллельно компасу по схеме, опубликованной тут ранее:
SDA -> SDI
SCL -> SCK
Компас, как работал, так и работает, а барометр признаков жизни не подаёт. Ни один светодиод не горит, хотя не знаю есть ли они там. Питание сначала подключал к 5в, потом замерил мультиметром, оказалось 3.29 (хотя мануал обещает 5). В итоге перепаял питание на 3.3В, не помогло. Скажите, у кого-то подключение по данной схеме работает? Должно ли на барометре что-то светиться?
И ещё: пробовал ставить
set baro_hardware=5
Если я правильно понимаю, включается фэйковый барометр с какими-то заранее прописанными показаниями и иконка сверху должна гореть, но этого не было. Почему так?
барометр с SPI интерфейсом
Круто
SDI это MOSI
SCK это SCLK
I2C и SPI работают параллельно?