Вопросы по iNav

Аппаратура …сейчас…найду буквы… Вот - FlySky FS-i6S 10Ch (в новом симпатиШном дизайне)
А скрин вот такой,
свой не делал:
Здесь слева у меня на аукс4 в режимах установлен “домой”, ну я на него “сет” и назначил. Тоже продублировал и в передатчике. А правая часть отключена (степ2)
А скрин вот такой
А почему у Вас цвета желтые а не синие? Вы случайно не Betaflight конфигуратор используете?
Нет, я же написал, (имел ввиду) что скрин какой попался под руку и ниже дописал, что свой не делал. Настройки то слева точно такие же. Меня смысл сам интересует, а не цвет интерфейса 😃
Меня смысл сам интересует, а не цвет интерфейса
Когда у общества нет цветовой дифференциации интерфейсов, то нет и цели…(©)
Нет, ну на самом деле, когда Вы спрашиваете совета по чему то конкретному, то лучше, таки, делать свои скрины. Очень сложно понять смысл, когда картинка не соответствует тексту…
Как в анекдоте: Пропала собака, похожа на бульдога, только лапы длинные, морда острая и хвост пушистый…)
Блин… я меркантильный, а вы, простите, … тоже не того 😉
Ну какая разница, какого цвета кнопочки? Все данные и закладки точно такие… Думаю всё прекрасно понятно для знающих.
Тем не менее, раз уж так принципиально, вот скрин лично мною только что сделанный. Еще горяченький 😃
:
Сейчас коптер почти весь разобран и не подключен жпс, по этому кнопки с режимом не видно. Ничего, что я вручную дописал (с жпс она там есть)?
Всякие KF, EKF, UKF по сути тот же комплементарник, но с динамической подстройкой коэффициентов. При постоянном и известном шуме от датчиков комлементарник и KF совершенно одинаковы по точности, никакой магии в KF нет, кроме того, что если он глючит, то понять что и куда крутить нереально.
В очень упрощенном виде да, тоже самое, но весь сок там как раз в расчете матрицы динамических корректирущих коэфицинтов и “простой” логикой этого не заменить…
Я в предыдущих релизах пробовал и субьективно даже с успехом. Но да, всего лишь субъективно и без мат. доказательств 😃
// apply Complimentary Filter (CF) with dynamic coef. to keep the calculated velocity based on baro velocity (i.e. near real velocity).
// By using CF it's possible to correct the drift of integrated accZ (velocity) without loosing the phase, i.e without delay
float dynK = 0.020f - min(abs(accZ)/15000.0f, 0.010f);
vel = vel * (1.0f - dynK) + sensorVel * dynK;
// attempts to get "rapid" alt...
// Integrator - altitude, cm
alt += vario * dTime;
// apply CF with dynamic coefficient to keep the calculated altitude near real baro/sonar altitude
dynK = 0.025f - min(abs(vario)/2000.0f, 0.015f);
alt = alt * (1.0f - dynK) + sensorAlt * dynK;
Блин… я меркантильный, а вы
А я педантичный… Вы еще с Шурикусом не сталкивались…)
Думаю всё прекрасно понятно для знающих
А Вы не думайте… Пишите все как для идиотов. Я полчаса втыкал почему у Вас включен дроп вместо ландинга, но при этом Вы пишете, что степ2 отключен… Я то вижу, что он включен…)
А приписку мелким текстом на обратной стороне(Вы случайно в кредитных или страховых организациях не работали?) я не сразу увидел… )
Но теперь то, все всё увидели и? Верно я настроил, можно отпускать дитя в небо?
п.с.
Вы случайно в кредитных или страховых организациях не работали?
К сожалению нет… ) Это просто сначала текст набирал, потом воткнул скрин, вот и съехало.
Еще вопрос (в новичках игнорируют) по теме: Почему дата журнала чёрного ящика 15 года? 1.12.2015 B так все файлы. Может жпс должен время и дату давать но не даёт? Если так, то как победить?
Подскажите,ПК SPR F3,баро MS5611 имеет дрейф.Это видно в конфигураторе(а в полёте трудно высоту держать т.е.он её совсем не держит в режиме альтхолд),за 3мин после подключения с 0 до 3 метров “поднимается”(всё на столе при неизменной температуре).ПК "одет"в родную пластмассу,баро заткнут поролоном.Прошивка 1.1.0. Его под-замену или чот не понажимал в настройках.И как считаете,если прикрутить по И2Ц ,параллельно с компасом,внешний ВМР280,то много хуже будет?
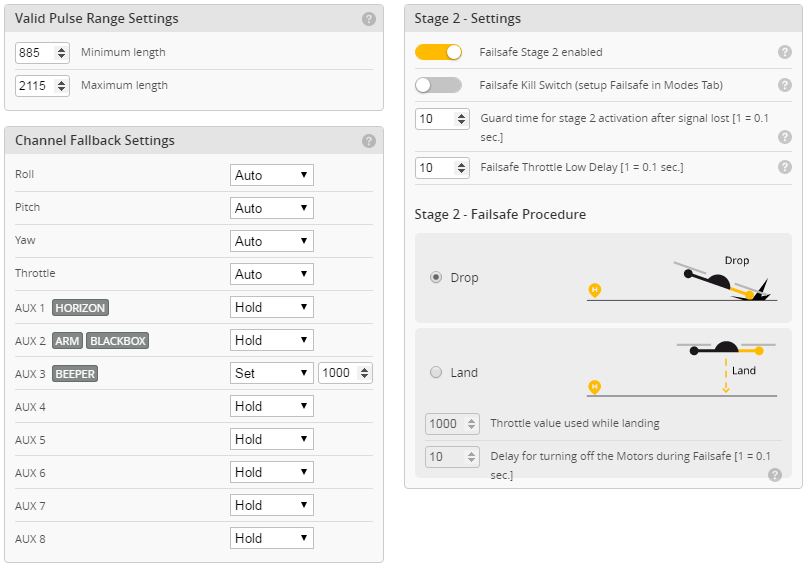
Вопрос по failsafe. С настройкой “Guard time for stage 2 activation” всё ясно. Кстати, какое оптимальное значение?
Но совсем непонятно что делает “Failsafe Throttle Low Delay”. Единственное, что пришло в голову, что этот параметр используется только если в Failsafe Procedure выбрано Land. Верно или нет?
И ещё: есть ли разница выбрать в Failsafe Procedure “Return to Home” или эмулировать включение этого режима в Channel Fallback?
Приветствую всех. Особую благодарность выражаю Константину и его коллегам по разработке проекта iNAV. Прочитал всю ветку, но так и не нашел ответа на вопрос.
У меня Naze 32 rev.5 и GPS чип MT3333. До того как прочитал всю ветку была установлена iNAV 1.2.1 и GPS в ней работал, но только на скорости 9600 и частоте обновления 1Гц. Пробовал и другую скорость и частоту - не работало, только 9600 на 1Гц. Сейчас установил iNAV 1.3 - GPS чип не видно.
3D Fix есть (подпаян светодиод и подключен маяк), координаты определяет нормально, а вот в iNAV конфигураторе не видится. Чип с протоколом NMEA. Также в числе поддерживаемых чипа нет.
Читал также что памяти в CC3D на NMEA не хватило, но про Naze 32 упоминания не нашел.
Вот кусочек Dump:
# dump
# version
# INAV/NAZE 1.3.0 Nov 2 2016 / 11:11:52 (479d607)
# pflags
# Persistent config flags: 0x00000000
# dump master
# mixer
mixer QUADX
mmix reset
smix reset
# feature
feature -RX_PPM
feature -VBAT
feature -UNUSED_1
feature -RX_SERIAL
feature -MOTOR_STOP
feature -SERVO_TILT
feature -SOFTSERIAL
feature -GPS
feature -FAILSAFE
feature -SONAR
feature -TELEMETRY
feature -CURRENT_METER
feature -3D
feature -RX_PARALLEL_PWM
feature -RX_MSP
feature -RSSI_ADC
feature -LED_STRIP
feature -DISPLAY
feature -UNUSED_2
feature -BLACKBOX
feature -CHANNEL_FORWARDING
feature -TRANSPONDER
feature -AIRMODE
feature -SUPEREXPO
feature -VTX
feature -RX_SPI
feature -SOFTSPI
feature -PWM_SERVO_DRIVER
feature RX_PPM
feature VBAT
feature MOTOR_STOP
feature GPS
feature FAILSAFE
# beeper
beeper GYRO_CALIBRATED
beeper RX_LOST
beeper RX_LOST_LANDING
beeper DISARMING
beeper ARMING
beeper ARMING_GPS_FIX
beeper BAT_CRIT_LOW
beeper BAT_LOW
beeper GPS_STATUS
beeper RX_SET
beeper ACC_CALIBRATION
beeper ACC_CALIBRATION_FAIL
beeper READY_BEEP
beeper MULTI_BEEPS
beeper DISARM_REPEAT
beeper ARMED
beeper SYSTEM_INIT
beeper ON_USB
# map
map AETR1234
# serial
serial 0 1 115200 38400 0 115200
serial 1 2 115200 9600 0 115200
set looptime = 2000
set i2c_overclock = OFF
set gyro_sync = OFF
set gyro_sync_denom = 2
set mid_rc = 1500
set min_check = 1100
set max_check = 1900
set rssi_channel = 0
set rssi_scale = 30
set rssi_ppm_invert = OFF
set rc_smoothing = ON
set input_filtering_mode = OFF
set min_throttle = 1050
set max_throttle = 1850
set min_command = 1000
set 3d_deadband_low = 1406
set 3d_deadband_high = 1514
set 3d_neutral = 1460
set 3d_deadband_throttle = 1000
set motor_pwm_rate = 400
set motor_pwm_protocol = STANDARD
set fixed_wing_auto_arm = OFF
set disarm_kill_switch = ON
set auto_disarm_delay = 10
set small_angle = 25
set reboot_character = 82
set gps_provider = NMEA
set gps_sbas_mode = NONE
set gps_dyn_model = AIR_1G
set gps_auto_config = ON
set gps_auto_baud = ON
баро заткнут поролоном.Прошивка 1.1.0
А почему версия не 1.3 (stable) ?
А почему версия не 1.3 (stable) ?
Лень(боюсь))) )перенастраивать.Как понимаю нельзя тупо скопировать настройки.
Читал также что памяти в CC3D на NMEA не хватило, но про Naze 32 упоминания не нашел.
С Naze32 тоже самое, платформа то одна. GPS работает только по протоколу UBLOX.

Если есть навыки, то можно пересобрать свою собственную прошивку, отключив ненужные и включив интересующие модули.
Лень(боюсь))) )перенастраивать.Как понимаю нельзя тупо скопировать настройки.
Тупо скопировать можно, но на версии 1.2 был изменен коэффициент, применяемый к значениям ПИДов. Поэтому ПИДы придется настраивать по-новой, а так же настраивать те фичи, которые появились в последующих версиях после 1.1.
Наконец-то получил барометр BMP280 и… жизнь стала сразу сложнее и непонятнее. Подключал его к порту I2C (ПК SPFracingF3) параллельно компасу по схеме, опубликованной тут ранее:
SDA -> SDI
SCL -> SCK
Компас, как работал, так и работает, а барометр признаков жизни не подаёт. Ни один светодиод не горит, хотя не знаю есть ли они там. Питание сначала подключал к 5в, потом замерил мультиметром, оказалось 3.29 (хотя мануал обещает 5). В итоге перепаял питание на 3.3В, не помогло. Скажите, у кого-то подключение по данной схеме работает? Должно ли на барометре что-то светиться?
И ещё: пробовал ставить
set baro_hardware=5
Если я правильно понимаю, включается фэйковый барометр с какими-то заранее прописанными показаниями и иконка сверху должна гореть, но этого не было. Почему так?
барометр с SPI интерфейсом
Круто
SDI это MOSI
SCK это SCLK
I2C и SPI работают параллельно?
барометр с SPI интерфейсом
Прикольно. А чего раньше никто не писал, тут неоднократно такой сетап обсуждался? Соответственно вопрос: какой барометр будет параллельно с компасом по I2C работать?
Update:
Проверил, по описанию барометр поддерживает I2C
так все обсуждаемые И2С
любой с I2C интерфейсом
я брал bn880
Описание типа
И2С или СПАЙ - хрен его знает
у И2С дб выходы SDA SCL
Снова я со своими вопросами…
Подскажете, чем отличается режим МАГ от режима HEADING LOCK?
что за режимы (в вики нет их) который я обвёл на скрине?:
я брал bn880
Не путаете? Я по такому названию только GPS + компас нашёл (в теме он тоже несколько раз упоминался)
Снова я со своими вопросами…
Подскажете, чем отличается режим МАГ от режима HEADING LOCK?
что за режимы (в вики нет их) который я обвёл на скрине?: