Вопросы по iNav

Все, вроде победил. Оказывается при питании от usb на gps не подается питание… Даже не думал об отсутствии питания
В забиксе тоже пункта бутлодер стм нет…
Если поставить галочку “показывать все устройства”, то в списках будет.
То что я встречал, если 5 вольт, то от usb не питаются, а если 4,5 или 3,3, то от usb запитываются. И обычно GPS приемники оснащены всякими led лампочками для внешней индикации состояния.
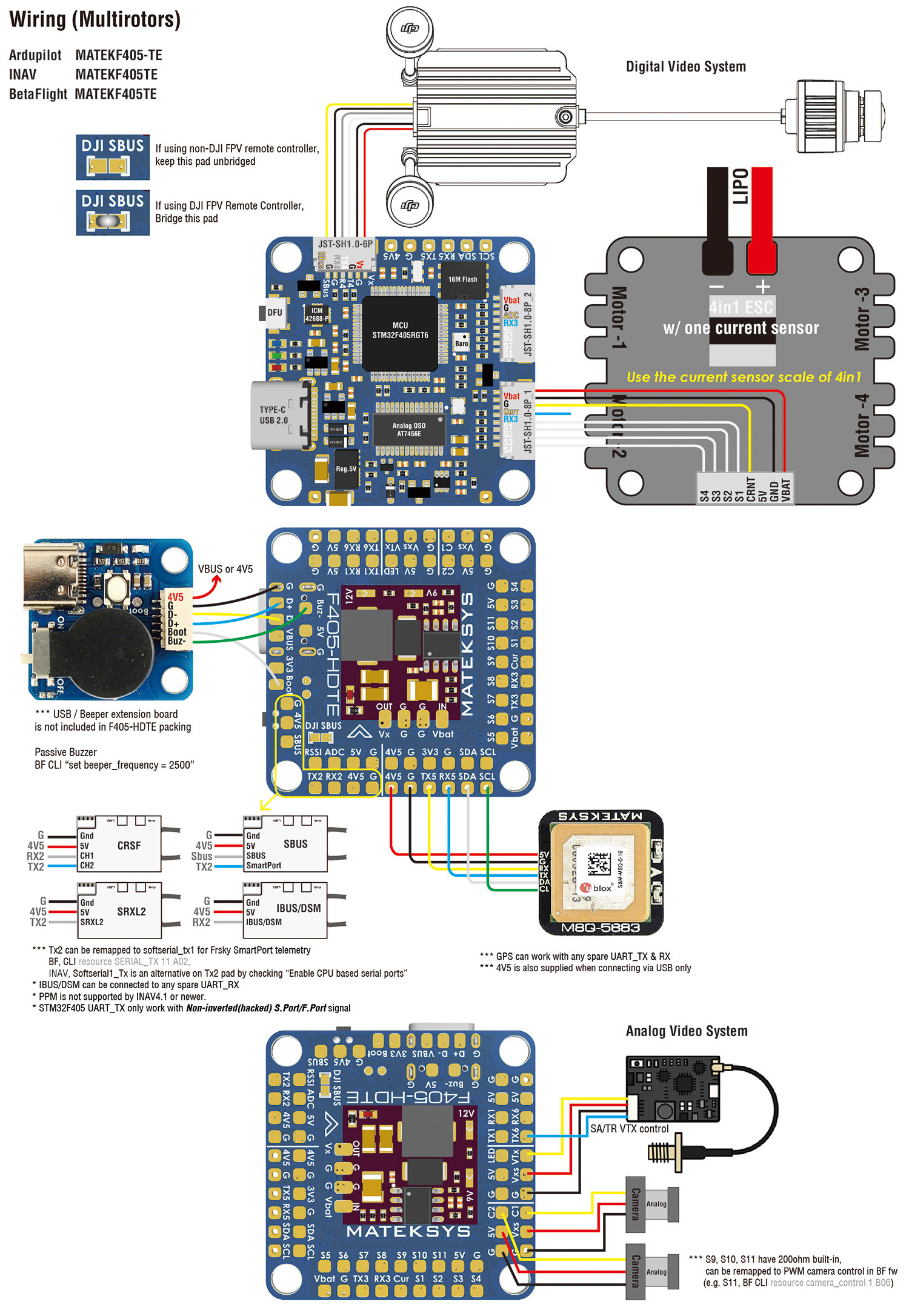
У матека ,например, на контроллерах два типа 5 вольтовых контактов. 5V и 4V5. 4V5 работает и при подключении юсб. На картинке под модулем gps написано.
Доброго времени суток, уважаемые! Полетел квадрик😁 Сегодня облетал (пару минут повисел и пару кругов сделал). Висит стабильно, высоту держит великолепно! Но, есть но, в режиме удержания позиции пытется изобразить сибастиена… Висит в удержании высоты и горизонта практически без движения (сегодня полный штиль), включаю удержание позиции он начинает лететь куда то, дергаю стик в в противоположную сторону, он вроде останавливается, около секунды висит как вкопанный и опять пытается улететь, при этом высота не меняется. Пиды не трогал
Как магнитометр себя по логам чувствует?
Надо дать немного полететь. Если это будет спираль, то надо калибровать компас.
Компас калибрую перед каждыми полетами, уже как ритуал) и в этот раз калибровал. Логи не снимал. Гегодня покавыряю немного еще настройки, проверю, если не победю) скину логи
Обычно рекомендуют в конфигураторе повращать полетником, если от наклонов коптер заворачивает, то что-то не то с компасом в плане ориентирования.
Доброго времени суток! Да, компас ведет себя немного странновато, при наклоне вперед/назад, все четко, при наклоне право/лево есть небольшие вращения квадрика по курсу. Но! Когда боролся с полетником от матек (405 мини те, были проблемы с удержанием высоты) Квадрик позицию держал отлично, но не держал высоту, сейчас наоборот, высоту держит как вкопанный, а вот позицию нифига… Полетник Skystar F405 HD. По расположению комплектующих ничего не менял, только сменил полетник. Если не затруднит, посмотрите пожалуйста ЛОГ полета, что то я не совсем еще могу разобраться как их (логи) правильно анализировать. Спасибо.
Перекалибруйте компас. Если крутит при покачивании - значит есть несоответствие по осям…
Есть выше хороший совет. Покрутить в конфигураторе. Может не тот угол наклона или не так указано расположение компаса на плате. Когда в конфигураторе крутите квадрокоптер, поверните на север, должно показывать 0 градусов. Потом проверьте остальные 3 направления. При калибровке лучше не только вокруг одной оси крутить, а по разным. И да… Еще бы видеть расположение gps… Где он находится. Допустим, при стандартном расположении в “багажнике” Часто бывает так, что силовые провода от аккумулятора оказываются рядом с gps, и это сильно влияет на компас. Литий-ионки могут давать наводки, но у меня на литокалах 18650 такого нет.
Посоветуйте как исправить ситуацию, перед полетом висит нормально вроде:
а при возврате домой перед посадкой его колбасит, landing отрабатывает нормально, inav 6.1, что я мог не так настроить?
Сейчас стоит flip270. При других значениях поведение компаса неадекватное. Калибровку проводил несколько раз и в конфигураторе и во дваре. Плптка компаса находится под gps модулем
Квадрик стоит на столе, направление по сторонам света показывает четко, при наклоне вперед/назад тоже норм. При наклоне право/лево он тоже отрабатывает, но при этом как бы немного поворачивается еще по оси, не всегда и не сильно, как будто немного плывут показания. При других значениях установки компаса вообще крутится сильно
Калибровку проводил несколько раз и в конфигураторе и во дваре.
Дома у компа такое может быть.
Калибровать на улице, непосредственно перед полётом. Стараться крутить квадрик так, чтоб компас был в одной точке, но во всех плоскостях.
Типа как куб в кубе крутишь.
Если тянет при включении NAV режима в какую-нибудь сторону, калибровать снова.
Сейчас стоит flip270
Корпус стоит с наклоном, там не совсем такое значение - вот он и чудит. Версия iNav какая?
Версия 5.1. Поставил вроде ровно, подложил 2-х стороннего скотча под одну сторону
Сейчас стоит flip270.
на компасе 5883 стрелочки x,y,z. Если микросхема сверху и x смотрит прямо по курсу, а y влево то угол установки 0,
x смотрит вправо, у прямо по курсу то 90 градусов,
x смотрит влево, y назад то 270 градусов,
x смотрит назад, то 180 градусов,
Если миросхема смотрит вниз то flip с соответствующими повороту градусами. Посмотрите как у вас направлены оси и поставьте градусы правильно.
Вам надо gps поднимать выше. Он сильно близко к карбону и наводкам от электронных компонентов. А там, где его, место предусмотренное рамой, у вас вообще пищалка. Если не хотите ставить мачту под gps, то надо как-то его от карбона рамы поднять повыше. Хотя бы на 2-3 см. И, возможно, оттянуть назад. Антенна 5.8 наводок на gps не дает.
Да, в маунте под gps пищалка живет, новый поленился печатать, а в тот что с комплекта не влез. Ок, переделаем.
Спасибо за советы, побыстрому напечатал маунт на корму под gps, получилось топорно (еще осваиваю 3d печать), но помогло. Квадрик висит на точке))) .
Вопрос, как близко можно его (gps) к раме размещать? Рама складная, и хочется сделать как можно компактнее.
Думается, что проблема с магнитометром была больше от электромагнитного звукоизлучателя чем от всего остального.
Ножку делают для магнитометра. У GNSS-приемника лишь бы антенна в небо смотрела. Можно и к раме прикрепить.