Вопросы по iNav

Полазил по инету, но не нашёл как подключить FUT6KR3006SB к Matek F405-STD iNAV Configurator 7й. В приёмнике установил 2й режим только S.BUS пробовал выбирать futaba ничего не меняется. Вроде светодиод на приёмнике после включения аппы зелёным светится… С радиолинками таких танцев не было.😦
пробовал выбирать futaba ничего не меняется
А где там это выбирается?
Вроде достаточно включить SERIAL и SBUS. И не забыть в портах для UART2 включить Serial RX
Доброго. С Radiolink R8FM никаких танцев. Даже порт не включал, он автоматом включен. А это подарили, чудо американской техники. Может для спортсменов Futaba T6K и рулит, но мне не зашло.
Вспомнил, что у футабы есть такая особенность что протокол SBUS у них inverted. У других производителей SBUS протокол inverted inverted (дважды инвертед) 😄.
Поэтому приемники других производителей надо подключать на специальный порт названый SBUS который инвертирует сигнал.
Попробуйте подключить футабовский приемник на RX2.
Может будет работать.
SBUS протокол inverted inverted (дважды инвертед)
дважды никто не инвертирует )))
просто у всех он “обычный” или прямой, а Futaba “пошла своим путем”(с)
но собака скорее всего “порылась” в канале газа,
у Futaba каналы тоже инвертированы относительно других производителей,
так что в аппаратуре на канал газа, надо поставить РЕВЕРС.
что бы с газом было “как у всех”
дважды никто не инвертирует )))
Может быть. Я так не понял что и как. 😆
Еще у футабы нейтральное положение ручек не 1500, а 1520. Поэтому надо сдвигать триммеры, чтобы в инав было 1500 при отпущенных ручках.
Также может быть, что минимальные и максимальные значения не равны 1000 и 2000 соответственно.
В INAV есть команда rxrange с помощью которой это можно поправить.
В конфигураторе есть галочка inverted. Попробую, отпишусь.
Поставил инверт, работает.😉
ребят подскажите по бетафлай, полагаю что настройка с айнав одинаковая. Нужно настроить RSSI в канал, но у меня при потери связи во вкладке ПРИЕМНИКИ все каналы двигаются примерно от 1800 до 1500 и один только арм от 1900 до 1100, подскажите как настроить что бы свободный канал при потери связи двигался во всем диапазоне
Может кому интересно. Перевел на русский INAV 7.1. Для русификации поместить файл messages.json в папку INAV-Configurator_locales\ru
disk.yandex.ru/d/rt8_h-PlyzA1zQ
Пишите в личку если, что то не то исправлю.
По идее тут надо ползти в настройки пульта. Что там показывает? Обычно айнав что видит с приемника, то и показывает.
Нужно настроить RSSI в канал, но у меня при потери связи во вкладке ПРИЕМНИКИ все каналы двигаются примерно от 1800 до 1500 и один только арм от 1900 до 1100, подскажите как настроить что бы свободный канал при потери связи двигался во всем диапазоне
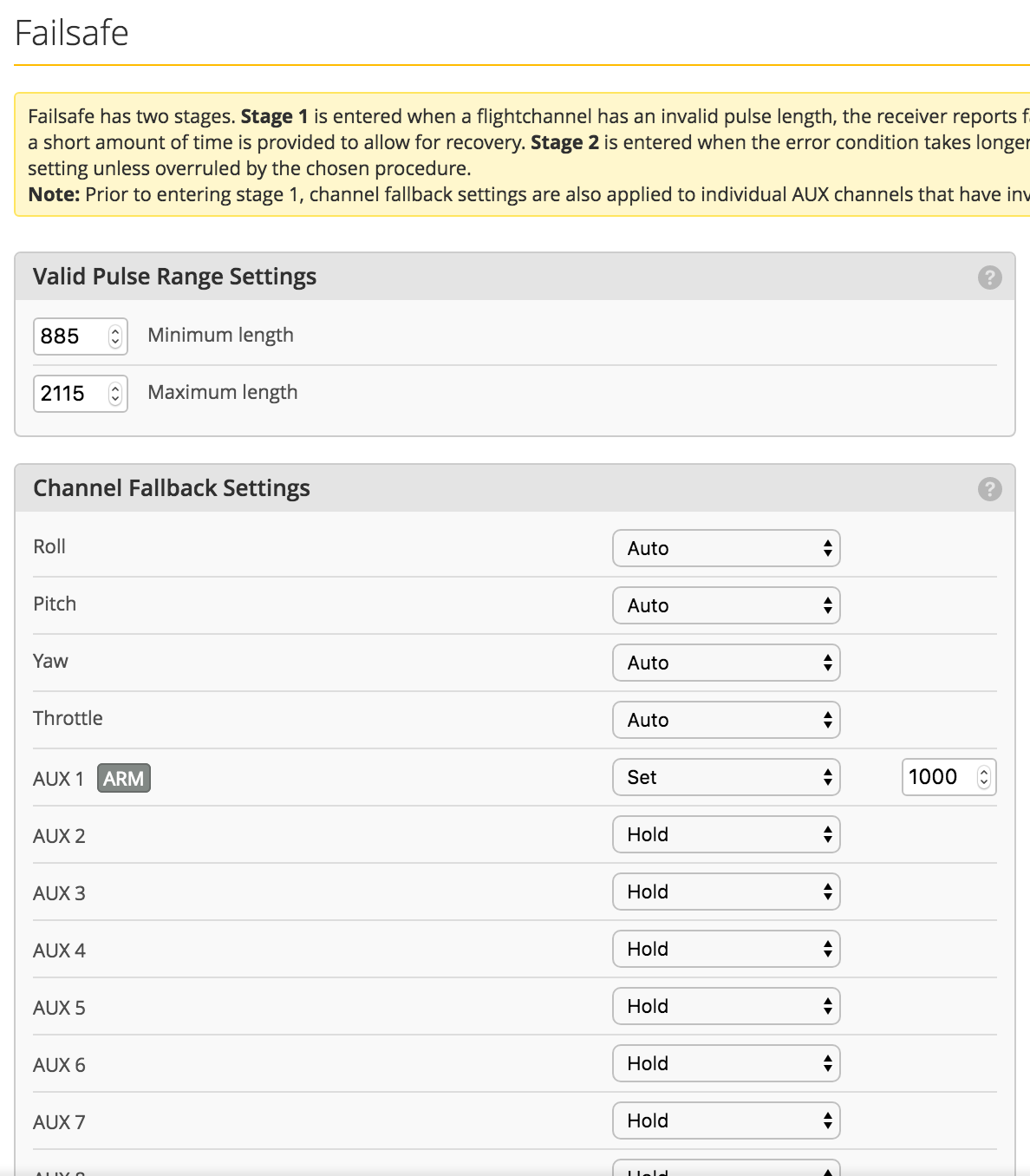
думаю это можно настроить в вкладке failsafe. на нужном канале выбрать set и установить нужное значение. Настройка failsafe доступна в expert mode (включается в верхнем правом углу конфигуратора)
Правда не понятно зачем это надо. Настройка отображения RSSI по другому делается. В зависимости от типа радиоуправления.
ребят помогите мне настроить RSSI. Пульт футаба, передача по С бус, использую ретранслятор, выставляю в канал RSSI. настраиваю set rssi_offset и set rssi_scale, при выключении питания ретранслятора 0, при включении 99, но при ухудшении связи так и остается 99.
ребят помогите мне настроить RSSI
может здесь есть полезная информация
betaflight.com/docs/development/Rssi
по этому мануалу и настраивал, вроде все понятно и просто ,ан нет)
Подскажите, есть ли сейчас дешёвые (< 3000 руб) полётники 20*20 F4-F7, которые шьются инавом? По типу бывших JHEMCU NOXE V1. Сейчас продаётся версия V3, которая в инав не умеет. Какие-то AOKODA есть, но с ними непонятно, то ли поддерживаются, то ли нет. Очень интересно было бы попробовать BAYCK Dolphin, но он тоже не поддерживается вроде. Короче, как-то грустно с поддержкой у инава.
Подскажите, есть ли сейчас дешёвые (< 3000 руб) полётники
Вот вроде не дорогой. На Али есть до 3500 руб.
SpeedyBee F405 WING MINI
speedybee.com/speedybee-f405-wing-mini-fixed-wing-…
так это под крыло, а надо под коптер
У них есть ещё SpeedyBee F405 Mini BLS speedybee.com/speedybee-f405-mini-bls-35a-20x20-st…
пойдёт, спасибо