Вопросы по iNav

Как подключать- народным способом, наугад?
А почему бы и нет? Это линии данных, а не питания - в крайнем случае поменяете местами если не заработает.
Что за модуль такой, где контакты разъёма не подписаны? Или разъёма нет?
Как подключать- народным способом, наугад?
Если модуль в корпусе, можно попробовать разобрать корпус, и посмотреть плату - часто там указана распиновка.Но I2C можно и методом тыка - его так сложно попалить.
После подключения, требуются дополнительные настройки, калибровка?
Калибровка само собой, но перед этим, скорее всего, нужно будет выставить поворот компаса - скорее всего, он как обычно стоит на нижней стороне платы, да еще и повернут. Тут тоже, либо посмотреть, как он расположен на плате, либо методом тыка. Ну а дальше уже проверять, что направление верно показывает, и что оно не уплывает при наклонах и поворотах.
Всем добрый день. Есть turnigy 9x, модуль связи FrSky X4R и автопилот SPRacing F3. В аппе с делан телеметрийный мод и прошита альтернативная прошивка. В итоге на экране аппы имею показания уровня связи и всё… Хочу видеть данные GPS (координаты). FrSky X4R и SPRacing F3 соединены так: в SPRacing F3 включено отображение телеметрии и выбран софтсериал2, TX и RX этого сериала соединены между собой и подключены к smart port FrSky X4R. В SPRacing F3 включал разные скорости, инвертировал сигнал… ничего не помогает. ЧТО я делаю не так??? (убил сегодняшний день на это)
Если модуль в корпусе, можно попробовать разобрать корпус, и посмотреть плату
В моём модуле она такая:
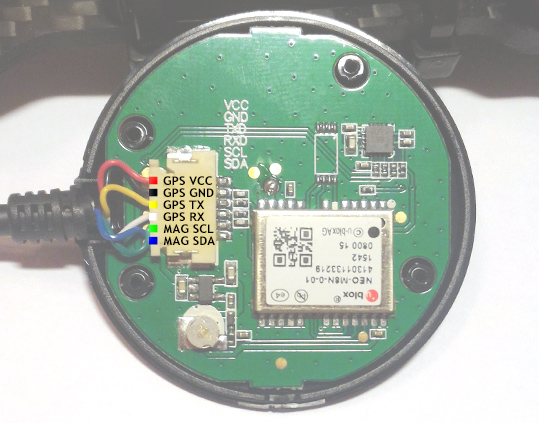
Поворот компаса для этого модуля, если правильно помню - CW270 Flip
В аппе с делан телеметрийный мод и прошита альтернативная прошивка.
Полагаю, что проблема не в полётнике. Что за модуль в аппе? DJT или XJT?
Если DJT, то взять что-либо с приёмника X-серии не получится, кроме уровня сигнала.
Константин, не могли бы вы всё-таки прокомментировать особенности отключения двигателей в авторежимах, описанные в моём посте?
Все так, как написано. Предполагается, что пилот, использующий MOTOR_STOP понимает что он делает.
Все так, как написано. Предполагается, что пилот, использующий MOTOR_STOP понимает что он делает.
То есть автовыключение двигателей после посадки алгоритмом не предусмотрено? Просто в ардупилоте после RTH или Land двигатели останавливаются, а через определённое время бездействия автоматически происходит дизарм.
автовыключение двигателей после посадки
- Параметр nav_disarm_on_landing контролирует поведение после посадки.
- При арминге стиками если используется MOTOR_STOP через auto_disarm_delay секунд происходит дизарм.
Эти параметры и еще очень много других описаны здесь: github.com/iNavFlight/inav/blob/master/…/Cli.md
Параметр nav_disarm_on_landing контролирует поведение после посадки.
Спасибо! Просто в конфигураторе такой переключалки не было, а в CLI не догадался поискать (чтобы искать - нужно знать, что оно есть).
При арминге стиками если используется MOTOR_STOP через auto_disarm_delay секунд происходит дизарм.
Про это в курсе - т.к. заимствовано с CF, да и в конфигураторе переключатель есть. Но у меня:
- Арминг на тумблере.
- С motor_stop имеется вышеописанная проблема в виде возможности остановки двигателей в авторежимах, поэтому использовать чревато.
В любом случае, спасибо за первый параметр - по идее, то, что мне и было нужно. Он же будет дизармить при арминге с тумблера?
Да я уже это понял, выкинул безвозвратно. Единственное не могу решиться на удаление встроенного компаса на SP F3 Deluxe.
[
Я выпаивал паяльником. Немного олова на жало, обхват чипа компаса пинцетом, жалом с оловом в центр чипа и дать немного ему растечься по поверхности чипа. Переодически пробовать тянуть пинцетом не отрывая жала паяльника, чип в итоге отойдет. Способ наверно глуповат и требует аккуратности и терпения, но у меня уже успешно пара контроллеров так лишилась своих компасов и летают. У SP F3 кстати вокруг компаса нет никаких элементов, что сильно повышает шансы на успех. В первый раз я делал эту процедуру с NAZE32 r6, там вокруг компаса много мелочи прям в притык к чипу, я конечно же чуть было не залил эту мелочь оловом. Но обошлось. С SP F3 все гладко прошло.
C I2C надеюсь разобрались. У м8n чип такой же что стоит на СП Ф3, так что скорее всего сразу заведется при первом же подключении.
Но не забудьте про ориентацию, на m8n компас припаян снизу платы (перевернут), так что в INAV надо будет обязательно поставить верную ориентацию. У меня с похожим модулем вышло Flip 270.
а тупо сковырнуть не получится? я так частенько от смд избавляюсь
Или дорожки перерезать? На древнем Crius Aiop была когда-то даже специально помеченная дорожка, которую надо было прорезать, чтоб цеплять внешний компас. На SP RF3 разве такой возможности нет?
В свежевышедшем iNAV 1.7.2 на таргете OMNIBUS перестал работать LED STRIP.
И, судя по изменениям в исходниках, такое может быть и в других таргетах.
Вопрос на засыпку. в безветрие коптер висит сносно, но когда ветер дует, коптер гуляет по высоте, нужно постоянно ловить его, я уже в коптере все поролоном утыкал, а он все гуляет. Пиды крутил но чето никак. Сейчас вроде бы стоковые по высоте. Но следует переключится в режим полета по точкам. Как только он прилетает в последнюю точку, он там останавливается и висит и ждёт дальнейшей команды. Нооо… Самое интересное то , что он висит очень чётко, и по высоте практически не плавает. Эт как так? Че другой алгоритм вычисления высоты? может мне кто либо объяснить, почему так поведение кардинально отличается? Я хочу такое поведение и в альтхолде. Естественно альтхолд использую вместе с посхолд.
Видос прилагается.
может мне кто либо объяснить, почему так поведение кардинально отличается? Я хочу такое поведение и в альтхолде.
Возможно, вы в аппе не можете удержать газ в “коридоре висения альтхолда” (alt_hold_deadband, по умолчанию 50). Судя по видео, у вас FlySky, а у него точность стиков не особо хорошая. В конце полёта по точкам полётник держит высоту, игнорируя канал газа, а как только переключаетесь в альтхолд - уже смотрит по этому каналу, хотите вы снижаться, висеть или подниматься. В общем, попробуйте увеличить alt_hold_deadband, например, до 100.
я специально для этого в осд вывел отображение уровня газа. и по нему выставлял 50 процентов. в этот раз прямо по осд не целился. но я вас уверяю, если целится ситуация такая же. а вот в безветрие висит.
я специально для этого в осд вывел отображение уровня газа. и по нему выставлял 50 процентов. в этот раз прямо по осд не целился. но я вас уверяю, если целится ситуация такая же. а вот в безветрие висит.
Я не знаю как реализован газ висения в INav, но у меня он разный на 3S и 4S акумуляторах. на 3s 70%, на 4s 40-45%. и флайскай не такой уж кривой, чтоб на нем нельзя было попасть в газ висения. У меня все ровненько висит, и даже всякие вкусности делает с флайскаем. Правда флайскай моденный сильно на дальность + 10 каналов. Я думаю проблема все же в чем то другом (верояно в корявом барометре?).
вот что у меня на флайскай вышло. Первая половина видео - посхолд и стаб, вторая - управление с EZGUI (follow me, wang и orbit)
Правда флайскай моденный сильно на дальность
Это как? Про 10каналов знкю, сам юзаю. Есть еще мод для расширеной телеметрии по айбус, правда это надо не только аппу шть но и приемник
Конфиг не обязателен, INAV сам сконфигурирует модуль как нужно.
Кстати. Айнав только ublox-модули умеет конфигурить?
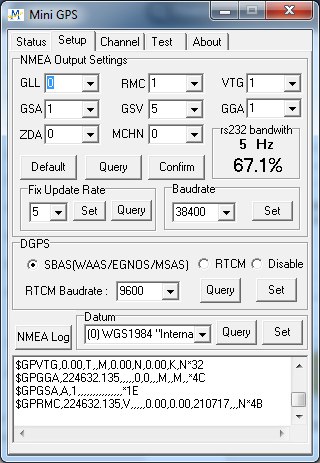
Имею пару модулей (PA6C и GMS G9) на чипе MT3333 от медиатека, их айнав не конфигурит. Бодрейт и апдэйт рейт остаются дефолтными (9600 / 1 Гц).
Рейты оптимальные я выставил, может стоит еще что-то изменить?
Протокол NMEA.
Он же будет дизармить при арминге с тумблера?
Да, будет.
В свежевышедшем iNAV 1.7.2 на таргете OMNIBUS перестал работать LED STRIP.
Да, есть глюк. Уже пофиксено, но нужно протестировать. У меня OMNIBUS F3 платы нет. github.com/iNavFlight/inav/pull/1924
Возможно, вы в аппе не можете удержать газ в “коридоре висения альтхолда” (alt_hold_deadband, по умолчанию 50). Судя по видео, у вас FlySky, а у него точность стиков не особо хорошая. В конце полёта по точкам полётник держит высоту, игнорируя канал газа, а как только переключаетесь в альтхолд - уже смотрит по этому каналу, хотите вы снижаться, висеть или подниматься. В общем, попробуйте увеличить alt_hold_deadband, например, до 100.
Согласен, вероятнее всего проблема именно тут. Раз в миссии или RTH держит высоту корректно - значит AltHold сам по себе работает правильно.
Имею пару модулей (PA6C и GMS G9) на чипе MT3333 от медиатека, их айнав не конфигурит. Бодрейт и апдэйт рейт остаются дефолтными (9600 / 1 Гц).
Поддержка MTK уже в ветке development. В следующем релизе будет.
C I2C надеюсь разобрались. У м8n чип такой же что стоит на СП Ф3, так что скорее всего сразу заведется при первом же подключении.
Но не забудьте про ориентацию, на m8n компас припаян снизу платы (перевернут), так что в INAV надо будет обязательно поставить верную ориентацию. У меня с похожим модулем вышло Flip 270.
Спасибо за подсказки и советы. Саму схему пробовал аккуратно отщелкнуть- не получилось, видимо научились Китайцы паять. А феном немного нагрел и пинцетом с небольшим усилием стянул с посадочного места. С 12С тоже без проблем- видимо угадал с первого раза и все заработало. Компас перевернул в настройках, но не угадал с направлением. Подключаю к компьютеру через телеметрию и видимо показания компаса с задержкой приходят. Посмотрел, вроде совпадают, откалибровал и в небо. Спутники отлично ловит, а вот унитаз был небольшой. После посадки заметил, что курс на 90 гр отличается от фактического. Сегодня поиграюсь с настройками и позже отпишусь и видео выложу. Самому интересно, как поменялось поведение коптера после замены штатного компаса на выносной.
Заметил, что у меня коптер после взлёта и в полёте всегда медленно разворачивает по часовой стрелке ( по Yaw) и мне переодически приходится его стиком радера поправлять. Это в режиме Stab, Acro, не навигационных. Вопрос, как его оттримировать? Нашёл на схеме диаграмму команд, но там нет триммирования по Yaw.
