F4BY. Отечественный ответ Pixhawka'm

может по логам глянуть почему комптер упал (там несколько логов, в последнем в режиме лоитер при добавлении газа упал и загорелся двигатель) drive.google.com/file/d/…/view?usp=sharing
а вот видео падения
drive.google.com/file/d/…/view?usp=sharing
Что хоть за прошивка?
Краш не включен что-ли? По идее должен был отключить моторы.
там несколько логов, в последнем в режиме лоитер
И все же какой конкретно?
Что-то есть сомнения, что он там есть.
Я посмотрел по видео записе с камеры отключил я питание примерно в 16:31 после падения, бежал до него секунд 30 может тоесть упал он на видео гдето в 16:30 значит лог есть он в архиве с датой 09,09,17 16:31 в том то и дело смотрел по логу как я понял (если правильно смотрел) по логу коптер летел себе дальше, но как такое может быть ?
есть он в архиве с датой 09,09,17 16:31
Нет такого. Есть 17:05.
drive.google.com/file/d/…/view?usp=sharing вот он отдельно
В этом логе нет полета.
Разве, ну по времени какраз он и попадает, причем какраз перед ним я перекалибровал компасс, а перед этим сдернул провода, тоесть лог должен был записатся, и по времени подходит (я посмотрел вреям когда был создан видео файл на камере и прибавил время крушения). И графики вроде бы показывают что то, вообщем мистика в таком случае, даже на карте есть линия как он пролетел. Ну я не разбираюсь особо вообщем странное все это.
В любом случае спасибо, буду переходить на назу. Так как аппарат довольно дорогой вышел, уже немного пугает если такое опять будет если одену зеркалку.
упал сегодня во время испытаний нового модуля ГПС+Компас (Micro UBLOX gpsv 5 NEO-M8N gps модуль гнсс HMC5983 ). На столе показывал себя отлично, в поле отказывается нормально работать. Прошивка 3.6 БЭТА
квадрик 330мм с тяговой DJI 2312A, регули мультишот 125, 4S
По высоте прыгает из за того что барометр не закрыт нормально, ничего кроме поролонки.
логи тут
в логе режим стабилайз, вы утверждаете что летали в лоитер, значит это не тот лог.
полетный контроллер какой бы управляющий сигнал на регуль не выдавал - это не может стать причиной перегрева и возгорания двигателя
перегрев двигателя приводит к снижению тяги и полетник стремясь прежде всего сохранить горизонтальное положение снижает мощность остальных моторов что приводит к снижению.
причин возгораний мотора может быть много.
возможно это подклинивание , например в следствие попадания песка в подшипник или неверный выбор типа мотора для веса аппаратата (недостаток можности и перегрев) или короткое замыкание между витками мотора
Та тут дело не в этом даже сгорел и фиг с ним уже заказл новый, ждать долго правда, и сгорел он от того что при приземлении открутился винт (хотя я не могу понять как если он самозатяжной), вопос был в том почему коптер пошел на снижение, а логи все что были выложил, я помню что полностью стик газа дал в максимум и все калибровал. Моторы хорошие DJI e600 у них тяга по 1800 грамм а мой коптер 3кг весит. Я сам пытался изучить логи и вот самый последний странный выше писали что мол в нем вообще полета нету, но почему он не записался, когда я сделал калибровку компасов и питание передернул перед полетом.
Странности были с самого начала, в режиме автотюн два раза файлсейф словил по радио. Хотя все настроено ровно и летал я близко.
Вообщем не знаю, немного уже опасаюсь я дальше эксперименты ставить, слава богу что хоть только двигло сгорело даже винт целый, а если батарею бахнул или раму было бы обиднее.
В Любом случае спасибо всем за ответы и помощь.
упал сегодня во время испытаний нового модуля ГПС+Компас (Micro UBLOX gpsv 5 NEO-M8N gps модуль гнсс HMC5983 ). На столе показывал себя отлично, в поле отказывается нормально работать. Прошивка 3.6 БЭТА
квадрик 330мм с тяговой DJI 2312A, регули мультишот 125, 4S
По высоте прыгает из за того что барометр не закрыт нормально, ничего кроме поролонки.
логи тут
Ну 3.6 все же бета , а не проверенная прошивка. Это как обычно на свой страх и риск.
Если не хочется экспериментировать, то стоит летать на 3.4.4.
В логе проблем с жпс не видно.
Есть вибрации. Коптер снижаться начал по команде с пульта. Просто не успел остановиться.
Не успел глянуть напряжение, а то может и питания не хватило.
Ну 3.6 все же бета , … Коптер снижаться начал по команде с пульта. Просто не успел остановиться.
Не успел глянуть напряжение, а то может и питания не хватило.
Вибрации есть, но небольшие
Про бета версию в курсе)))
Присутствует заторможенность на реагирование изменения по высоте, возможно из за плохоукрытого барометра. Коптер просто полетел не реагируя на ролл и питч, пришлось сажать.
Есть проблеммы с компасом. Датчик питания не присоединен.
Про барометр не успел глянуть.
Без питания плохо. Как теперь оценивать?
Вибрации есть, но небольшие
Ну да. Есть небольшие срывы, но пока не установлена причина приходится учитывать все.
8-9 сентября из-за того что на солнце накануне были сильнейшие выбросы на земле происходили сильные магнитные бури.
мы летали в субботу 10, когда уже по всем прогнозам “зеленая зона”. общая оценка что радио 2.4 работает хуже, больше дропов, даже на небольших расстояниях случаются фаилсэйвы, на качестве фпв видео заметных отличий с обычной обстановкой практически незаметно.
влияния мангитной бури на полетник не было отмечено.
летали ардуплейн 3.8 и ардукоптер 3.6 дев альфа (с дисплеем но без внешнего компаса)
если кто летал 8-9 и замечал перебои в работе радио, жпс, фпв -это логичный и ожидаемый результат.
Вообщем не знаю, немного уже опасаюсь я дальше эксперименты ставить, слава богу что хоть только двигло сгорело даже винт целый, а если батарею бахнул или раму было бы обиднее.
Без лога тяжко (можно считать неудачным сбоем).
Но, если судить по видео, то вполне могла быть проблема с мотором. При движении вперед коптер мотало по яву, что характерно при проблемах с мотором. Тяги не хватило и он достаточно плавно пошел вниз.
Т.е. ничего страшного, надо просто внимательно перепроверить все детали и проводку.
На первое время не отлетать от себя, а просто повисеть рядом, пока не убедитесь в надежности.
Лог в ардукоптере и арудуплэйне не записиывается в следующих случаях .
- если вы заходили по мавлинку в список логов через соответствующую функцию мишен планера. (она дизактивирует запись лога)
- если после включения питания заармили аппарат, затем дизарм. дальше, при дальнейших армах лог писаться не будет до перезагрузки.
это такая техническая особенность
Вибрации есть, но небольшие
Еще раз глянул. И впрямь маленькие, а всплески как-будто от ветра. Нет зависимости от скорости и набора высоты.
Присутствует заторможенность на реагирование изменения по высоте, возможно из за плохоукрытого барометра.
Да, колебания барометра ± 1 м относительно заданной высоты (многовато).
Коптер просто полетел не реагируя на ролл и питч, пришлось сажать.
Нашел 1 момент.
Было много переключений режимов. На один из переключений с лойтера в альтхольд есть подозрения.
В момент переключения газ был в 0. В результате при включении альтхольда резко скакнули NKF2.GSZ и NKF4.SM.
Еще не понял, что значат эти параметры, но похоже ПК чуть по сопротивлялся и сдался.
И. Баро надо защитить. Он тянет за собой общую расчетную высоту.
Да, переключений было много, проверял удержание))) он постоянно унитазил. Крутил компас но это еще больше ухудшало ситуацию.
А какой жпс стоял?
Ну и как стандартный вариант - сделать калибровку компаса перед взлетом.
Еще можно на провода жпс и компаса одеть колечки.
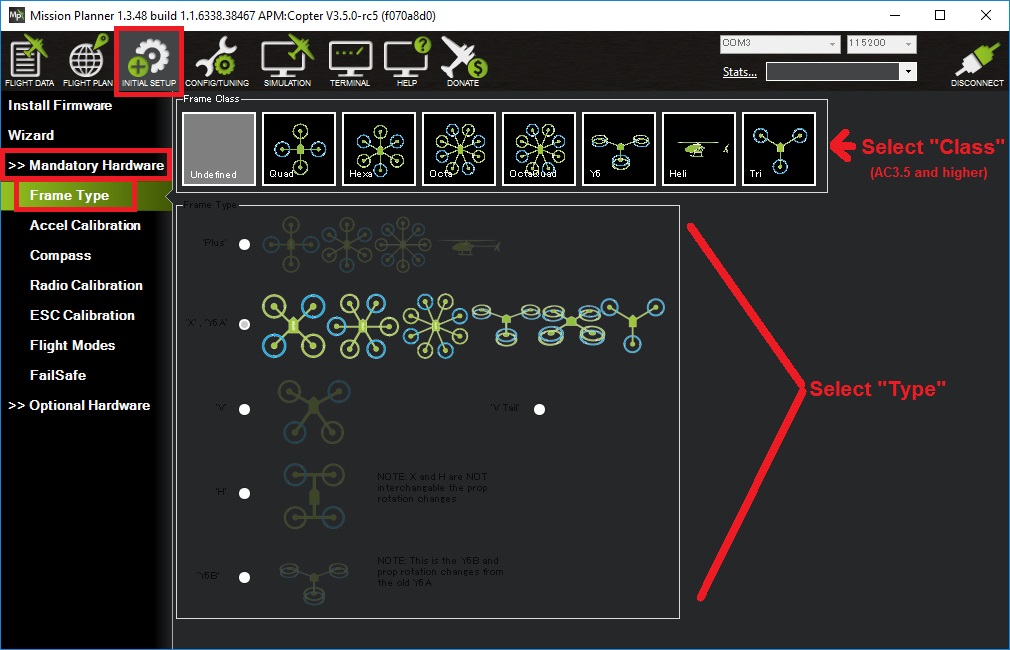
Не знаю куда написать, не нашел темы про пиксрейсер - последняя прошивка ,закачивал как квад , при арме пишет проверьте прошивку на предмет соответствия рамы. Где можно подтвердить что у меня квад. Нашел в фул параметрах какая рама-поставил 1 , а вот какой класс ставить не знаю, поставил 1 - крутится только 1 движок, короче может кто знает куда копать.
Где можно подтвердить что у меня квад.
Теперь так(мишн планер тоже должен быть свежий):