F4BY. Отечественный ответ Pixhawka'm

Лог в ардукоптере и арудуплэйне не записиывается в следующих случаях .
- если вы заходили по мавлинку в список логов через соответствующую функцию мишен планера. (она дизактивирует запись лога)
- если после включения питания заармили аппарат, затем дизарм. дальше, при дальнейших армах лог писаться не будет до перезагрузки.
это такая техническая особенность
Вибрации есть, но небольшие
Еще раз глянул. И впрямь маленькие, а всплески как-будто от ветра. Нет зависимости от скорости и набора высоты.
Присутствует заторможенность на реагирование изменения по высоте, возможно из за плохоукрытого барометра.
Да, колебания барометра ± 1 м относительно заданной высоты (многовато).
Коптер просто полетел не реагируя на ролл и питч, пришлось сажать.
Нашел 1 момент.
Было много переключений режимов. На один из переключений с лойтера в альтхольд есть подозрения.
В момент переключения газ был в 0. В результате при включении альтхольда резко скакнули NKF2.GSZ и NKF4.SM.
Еще не понял, что значат эти параметры, но похоже ПК чуть по сопротивлялся и сдался.
И. Баро надо защитить. Он тянет за собой общую расчетную высоту.
Да, переключений было много, проверял удержание))) он постоянно унитазил. Крутил компас но это еще больше ухудшало ситуацию.
А какой жпс стоял?
Ну и как стандартный вариант - сделать калибровку компаса перед взлетом.
Еще можно на провода жпс и компаса одеть колечки.
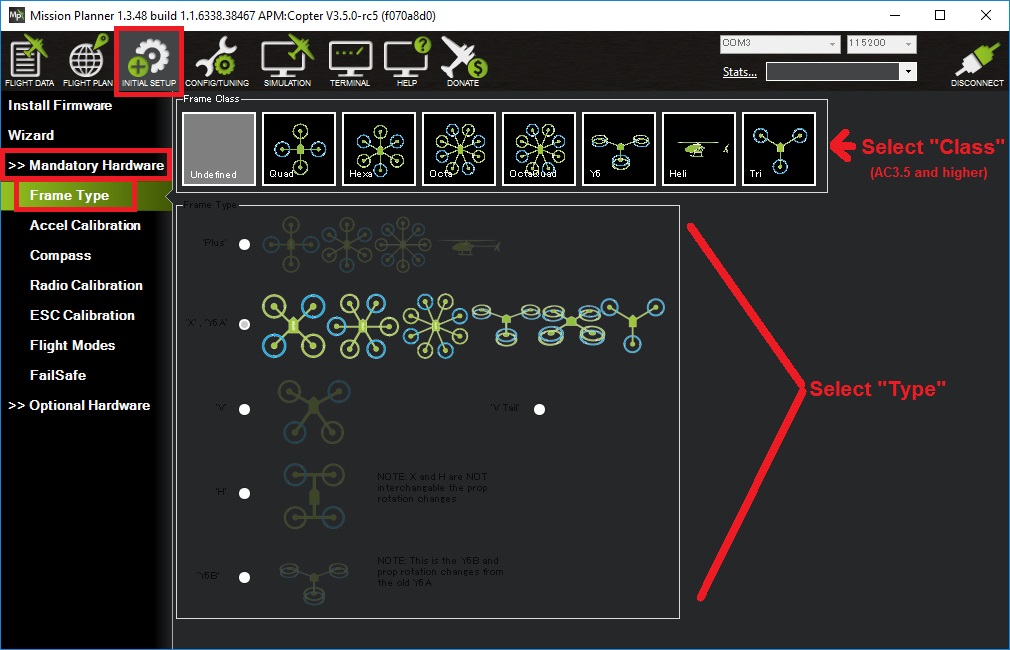
Не знаю куда написать, не нашел темы про пиксрейсер - последняя прошивка ,закачивал как квад , при арме пишет проверьте прошивку на предмет соответствия рамы. Где можно подтвердить что у меня квад. Нашел в фул параметрах какая рама-поставил 1 , а вот какой класс ставить не знаю, поставил 1 - крутится только 1 движок, короче может кто знает куда копать.
Где можно подтвердить что у меня квад.
Теперь так(мишн планер тоже должен быть свежий):
Открывал, но как раз где квад у меня как и у Вас пусто)) Счас качаю новый МП , если получится-напишу.
И да, на первой вкладке где мессаджи о какая рама, прошивка и т.д. стоит нонейм рама, вот я и офигел.
Не знаю куда написать, не нашел темы про пиксрейсер - последняя прошивка
Так в теме про пиксы тоже самое:).
И да в новой прошивке так. Удобно, теперь не надо переставлять рамы.
поставил 1 - крутится только 1 движок
попробуйте перекалибровать регуляторы оборотов двигателей.
моторы могут не стартовать если неверно настроен диапазон входного сигнала
Спасибо, разобрался.Перепрошил пикса и все регули перепрошил . Есть такой прикол на бихели прошивках-стоит галочка разрешающая калибровать регули с пульта, советую ее убирать , иначе неправильная комбинация на аппе ( ребенок поиграется или сам случайно сядешь на аппу:)) и регули “поедут”.
Вообщем на INAV не работает логгер на сд карточку, какие форматы только не пробовал и 1-4гб карты разные ноль толку, в блек боксе пишет filesystem initializing.
Коллеги, F4BY для самолета под Arduplane полноценно сегодня все возможности Pixhawk поддерживает?
да, недавно тестили свежую альфа прошивку - работает великолепно
ссылка …apmcopter.ru/…/alfa-testirovanie-novyx-nebezopasn…
в первом посте ссылки на все типы прошивок
ardurover.px4 - машинка, танк, лодка, аэросани, судно на воздушной подушке
antennatracker.px4 - поворотка антенны
arducopter.px4 - мультикоптеры, все поддерживаемые типы, выбор типа рамы осуществляется в параметрах
arducopter-heli.px4 - традиционный вертолет
arduplane.px4 - самолеты. втч конвертопланы и летающее крыло
ardusub.px4 - подлодка или батискаф
в плане свежих новшеств для самолета контрллер обеспечивает до 12 выходов пвм для управления сервами и моторами, что необходимо для управления конвертопланами с поворотным крылом или поворотными моторами
Спасибо, разобрался.Перепрошил пикса и все регули перепрошил . Есть такой прикол на бихели прошивках-стоит галочка разрешающая калибровать регули с пульта, советую ее убирать , иначе неправильная комбинация на аппе ( ребенок поиграется или сам случайно сядешь на аппу:)) и регули “поедут”.
Пробовал на Блхели32 убирать галочку так аирбот не смог откалиброваться и запуститься. Можно проверить и на обычном блхели, но думаю может получиться такой-же результат.
Теперь мы есть тут github.com/ArduPilot/ardupilot/tree/…/f4by-ch
кто то обещал “съесть свой котелок” если это случится.)
еще одна хорошая новость Эндрю Тиджел рассказал о том что сейчас готовит поддержку протокола дшот для всех контроллеров с прошивкой ардупилот,
кроме того будет возможность программировать регуляторы подключившись по юсб к полетному контроллеру
вот это новость так новость))) ждем когда добавят в официальные прошивки и можно будет обновлять из мишен планера
Теперь мы есть тут github.com/ArduPilot/ardupil.../hwdef/f4by-ch
Не все знают проект как свои 5 пальцев)) Что это значит то?
Будет официальная поддержка как только арду перейдет на чибиос?
как это я понимаю
официально каждый контроллер поддерживает продавец. т.е. техподдержка, гарантия, ремонт.
уже сейчас можно склонировав исходники на локальный компьютер и выполнив инструкции по настройке среду разработки собрать прошивку из исходников под контроллер f4by
это позволяет пользователям при необходимости быстро доработать прошивку под свои нужды.
второй этап контроллер включат в регулярную сборку где можно будет загрузить стабл или самый альфа вариант где то тут firmware.ardupilot.org/Copter/2018-03/
третий этап контроллер включают в число автоматически распознаваемых для мишен планер, т.е. можно будет обновить прошивку ничего не закачивая
ну вот мы и в доке
ardupilot.org/copter/docs/common-f4by.html
Получилось хорошее расширение (дополнение) линейки. Все же 12 выходов при таких размерах больше нет.
Осталось дождаться саму 3.6 окончательную.
Прошу подсказать по строчке из инструкции:
Контакты D2 и D3. С прошивкой 3.3. и выше используются для подключения LED для индикации ARMING и 3Dfix GPS.
Я правильно понял, что используются два светодиода?
Между выходами контактов - и S напряжение для подключение светодиодов напрямую, или нужен токоограничивающий резистор?