F4BY. Отечественный ответ Pixhawka'm

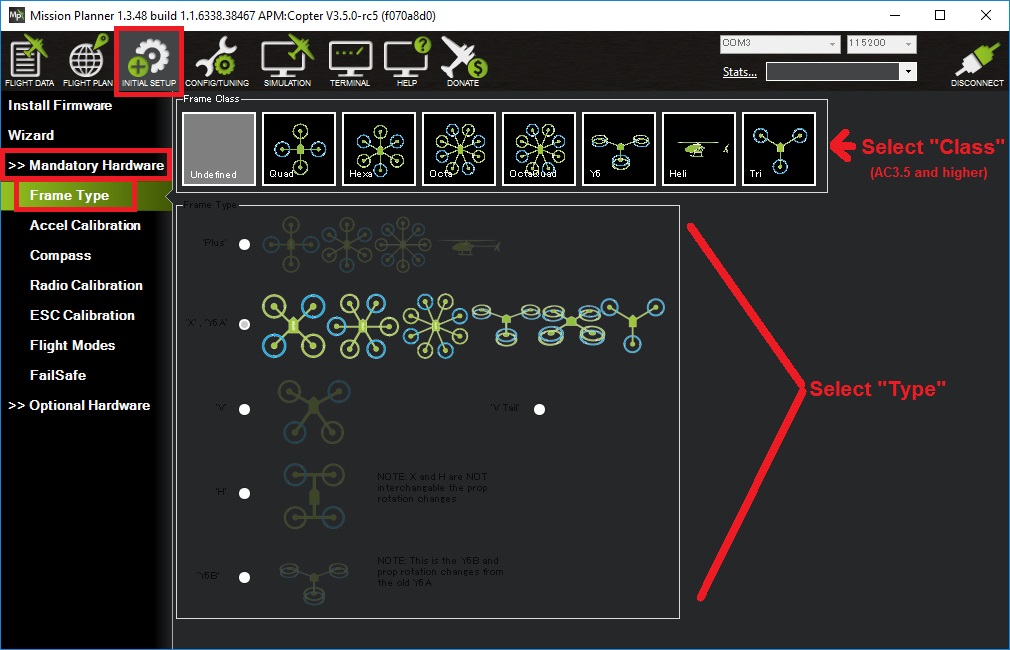
Не знаю куда написать, не нашел темы про пиксрейсер - последняя прошивка ,закачивал как квад , при арме пишет проверьте прошивку на предмет соответствия рамы. Где можно подтвердить что у меня квад. Нашел в фул параметрах какая рама-поставил 1 , а вот какой класс ставить не знаю, поставил 1 - крутится только 1 движок, короче может кто знает куда копать.
Где можно подтвердить что у меня квад.
Теперь так(мишн планер тоже должен быть свежий):
Открывал, но как раз где квад у меня как и у Вас пусто)) Счас качаю новый МП , если получится-напишу.
И да, на первой вкладке где мессаджи о какая рама, прошивка и т.д. стоит нонейм рама, вот я и офигел.
Не знаю куда написать, не нашел темы про пиксрейсер - последняя прошивка
Так в теме про пиксы тоже самое:).
И да в новой прошивке так. Удобно, теперь не надо переставлять рамы.
поставил 1 - крутится только 1 движок
попробуйте перекалибровать регуляторы оборотов двигателей.
моторы могут не стартовать если неверно настроен диапазон входного сигнала
Спасибо, разобрался.Перепрошил пикса и все регули перепрошил . Есть такой прикол на бихели прошивках-стоит галочка разрешающая калибровать регули с пульта, советую ее убирать , иначе неправильная комбинация на аппе ( ребенок поиграется или сам случайно сядешь на аппу:)) и регули “поедут”.
Вообщем на INAV не работает логгер на сд карточку, какие форматы только не пробовал и 1-4гб карты разные ноль толку, в блек боксе пишет filesystem initializing.
Коллеги, F4BY для самолета под Arduplane полноценно сегодня все возможности Pixhawk поддерживает?
да, недавно тестили свежую альфа прошивку - работает великолепно
ссылка …apmcopter.ru/…/alfa-testirovanie-novyx-nebezopasn…
в первом посте ссылки на все типы прошивок
ardurover.px4 - машинка, танк, лодка, аэросани, судно на воздушной подушке
antennatracker.px4 - поворотка антенны
arducopter.px4 - мультикоптеры, все поддерживаемые типы, выбор типа рамы осуществляется в параметрах
arducopter-heli.px4 - традиционный вертолет
arduplane.px4 - самолеты. втч конвертопланы и летающее крыло
ardusub.px4 - подлодка или батискаф
в плане свежих новшеств для самолета контрллер обеспечивает до 12 выходов пвм для управления сервами и моторами, что необходимо для управления конвертопланами с поворотным крылом или поворотными моторами
Спасибо, разобрался.Перепрошил пикса и все регули перепрошил . Есть такой прикол на бихели прошивках-стоит галочка разрешающая калибровать регули с пульта, советую ее убирать , иначе неправильная комбинация на аппе ( ребенок поиграется или сам случайно сядешь на аппу:)) и регули “поедут”.
Пробовал на Блхели32 убирать галочку так аирбот не смог откалиброваться и запуститься. Можно проверить и на обычном блхели, но думаю может получиться такой-же результат.
Теперь мы есть тут github.com/ArduPilot/ardupilot/tree/…/f4by-ch
кто то обещал “съесть свой котелок” если это случится.)
еще одна хорошая новость Эндрю Тиджел рассказал о том что сейчас готовит поддержку протокола дшот для всех контроллеров с прошивкой ардупилот,
кроме того будет возможность программировать регуляторы подключившись по юсб к полетному контроллеру
вот это новость так новость))) ждем когда добавят в официальные прошивки и можно будет обновлять из мишен планера
Теперь мы есть тут github.com/ArduPilot/ardupil.../hwdef/f4by-ch
Не все знают проект как свои 5 пальцев)) Что это значит то?
Будет официальная поддержка как только арду перейдет на чибиос?
как это я понимаю
официально каждый контроллер поддерживает продавец. т.е. техподдержка, гарантия, ремонт.
уже сейчас можно склонировав исходники на локальный компьютер и выполнив инструкции по настройке среду разработки собрать прошивку из исходников под контроллер f4by
это позволяет пользователям при необходимости быстро доработать прошивку под свои нужды.
второй этап контроллер включат в регулярную сборку где можно будет загрузить стабл или самый альфа вариант где то тут firmware.ardupilot.org/Copter/2018-03/
третий этап контроллер включают в число автоматически распознаваемых для мишен планер, т.е. можно будет обновить прошивку ничего не закачивая
ну вот мы и в доке
ardupilot.org/copter/docs/common-f4by.html
Получилось хорошее расширение (дополнение) линейки. Все же 12 выходов при таких размерах больше нет.
Осталось дождаться саму 3.6 окончательную.
Прошу подсказать по строчке из инструкции:
Контакты D2 и D3. С прошивкой 3.3. и выше используются для подключения LED для индикации ARMING и 3Dfix GPS.
Я правильно понял, что используются два светодиода?
Между выходами контактов - и S напряжение для подключение светодиодов напрямую, или нужен токоограничивающий резистор?
Я правильно понял, что используются два светодиода?
Да.
Между выходами контактов - и S напряжение для подключение светодиодов напрямую, или нужен токоограничивающий резистор?
Напрямую, если используется обычный светодиод. Если мощный или лента, то через драйвер (силовой транзистор).
Контакты D2 и D3. С прошивкой 3.3. и выше используются для подключения LED для индикации ARMING и 3Dfix GPS.
К сожалению, в связи с интеграцией, в последней прошивке пока не планируется вывод на D2 и D3 (надо уточнять для каждой прошивки). Весь упор сделан на вывод этой информации на леддисплей.
Спасибо за вопрос. Надо будет дополнить инструкцию.
спрашивали про параметр фильтрации радиоуправления, для настройки отзывчивости на стики для рейсер-дронов
параметр RC_FEEL_RP в новых прошивках был заменен на ATC_INPUT_TC
при этом у нового параметра своя шкала, для быстрой реакции на стики ставим 0.05
ardupilot.org/copter/docs/parameters.html#atc-inpu…
сам столкнулся при тестировании отзывчивости на мелкой раме, но к моменту тестирования так и не нашел…
параметр RC_FEEL_RP в новых прошивках был заменен на ATC_INPUT_TC
при этом у нового параметра своя шкала, для быстрой реакции на стики ставим 0.05
ardupilot.org/copter/docs/parameters.html#atc-inpu…
тесты этих выходных.
собранный из репозитория ardupilot\master конфиг с ртос chibios
эта ртос считается более легковесной по сравнению с натикс, использованной ранее, работает с f4by при увеличении mainloop с 400 до 1000гц обеспечивая минимальную задержку от считывания данных гироскопов до передачи команды на управление моторами.
при этом существенно снизился нагрев CPU
пиды оставил подобранные для 400гц, на вид и слух - слегка завышены.
выполнено несколько полетов в ходе которых визуально проверено качество стабилизации в быстрых подъемах и спусках, второй тест контроль работы систем удержания высоты и позиции
Каким образом можно “организовать” резервное питание для этого ПК?
Каким образом можно “организовать” резервное питание для этого ПК?
развязка стоит на usb. тоесть можно подать 5 вольт на пины питания и пять вольт на разьем usb. ну или самому сделать