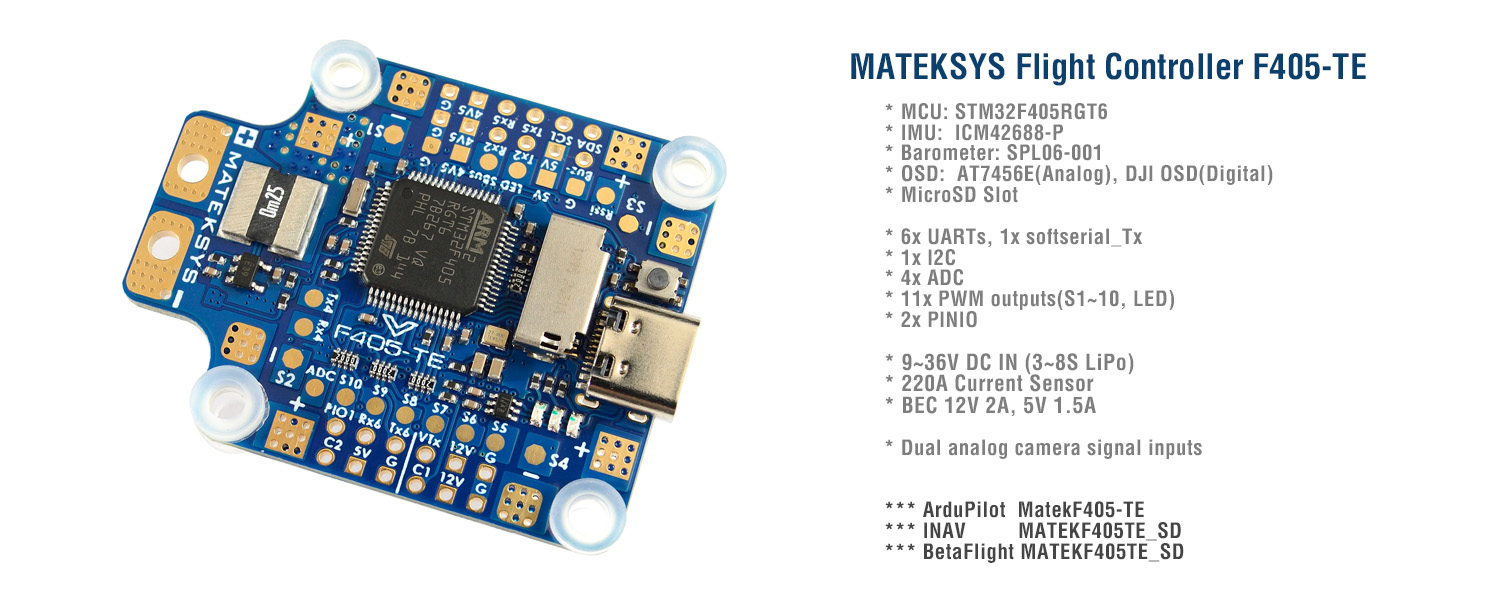
контроллер matek f405-te

Добрый день, Господа! Прошу Вашего совета. Это моя первая сборка. Собираю на 7" раме контроллер MATEK F405-TE. По незнанию не обратил внимание на описание контроллера: Firmware: ArduPilot: MatekF405-TE
Возможно ли пере прошить этот контролёр под BetaFligh или INAV?
Т.к. для меня как новичка настройка каптёра на ArduPilot сложна.
Большое спаибо, в примечании написано:
INAV, DSHOT can not work on S3, S5,S7 because of DMA clash, pls use ONESHOT or MULTISHOT and calibrate ESC PWM range. BetaFlight, set dshot_bitbang = ON when using X6 and X8 DSHOT.
Получается пайку соединения ESC с Контролем S1 к S1; S2 к S2; S3 к S3; S4 к S4 оставляю, но нужно где-то то настроить?:
PWM, INAV/BF MultiRotor:
S1 5 V tolerant I/O TIM8_CH4 Motor
S2 5 V tolerant I/O TIM8_CH3 Motor
S3 5 V tolerant I/O TIM1_CH3N Motor
S4 5 V tolerant I/O TIM1_CH1 Motor
Получается пайку соединения ESC с Контролем S1 к S1; S2 к S2; S3 к S3; S4 к S4 оставляю, но нужно где-то то настроить?
Да. Пайку оставьте. Надо в настройках выбрать ONESHOT или MULTISHOT и откалибровать регуляторы.
Думаю можно и с DSHOT попробовать. Кто знает может в новых версиях Инав уже все работает. Не будет работать - тогда ONESHOT или MULTISHOT
Большое спасибо за помощь, прошить в BetaFlight получилось с первого раза.
Проверил даже вращение моторов, вращение в нужных направлениях, а вот с соответствием 1, 2, 3 и 4 буду изменять.
Впереди настройка 😃
а вот с соответствием 1, 2, 3 и 4 буду изменять.
Обратите внимание на направление стрелки нарисованной на этом контроллере. Рядом с надписью F405 -TE. Она указывает направление вперед. Соответсвенно батарея подключается справа. На гоночных квадриках так раньше делали.
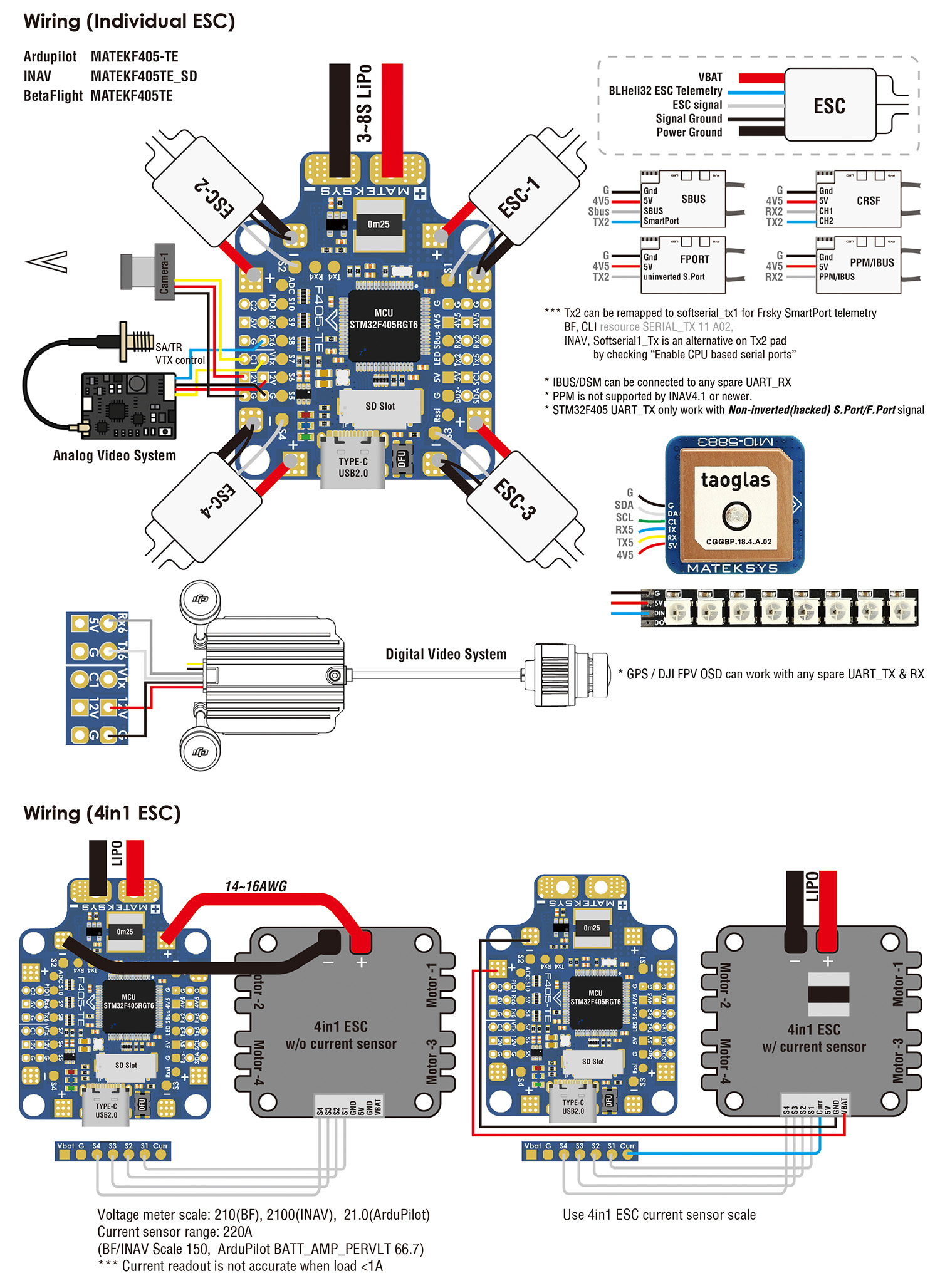
При таком положении контроллера порядок моторов правильный

А какие у вас esc? 4в1 или отдельные?
Да, направление стрелки на контроллере учел. Нумерация моторов такая, только вращение к камере, т.е. стандартное.
У меня ESC: 35A BLheli_S 2-6S 4 в 1 ESC.
BLheli_S
можно использовать этот онлайн конфигуратор esc-configurator.com
Спасибо, завтра попробую.
Воспользовался Вашей ссылкой, получилось прошить новой прошивкой.
Но не нашел как менять последовательность вращения моторов.
Решил по старинке, перепаял провода управления согласно правильной последовательности вращения - заработало 😃
Спасибо. Можно Вам задавать вопросы в личку, что бы не засорять Форум?
Т.к. впереди настройка по подключениям по UART.
Но не нашел как менять последовательность вращения моторов.
Я подумал, что вам надо поменять направление вращения. А не порядок моторов.
А как ecs расположен на квадрике? Если батарейными проводами назад то порядок моторов будет правильный
что бы не засорять Форум?
На этом форуме стало так мало посетителей, что думаю хуже не будет 😄 давайте здесь обсуждать.
Стоит как на картинке, вид сверху на квадрик.
Я подписал в какой последовательности вращались моторы, получается его нужно было ставить схемами вниз и паять.
Тогда как раз бы соответствовало моторам. Ну да ладно, исправил перепайкой управляющих проводов к контролер:
Я подписал в какой последовательности вращались моторы
Это вы определили путем тестирования моторов в бетафлае вкладке motors? При перемещении ползунка с надписью 1 должен вращаться мотор 1 то есть правый задний. И так далее. И не важно в какую сторону. Направление вращения настраивается отдельно через настройку ESC.
Просто меня смущает
Решил по старинке, перепаял провода управления согласно правильной последовательности вращения - заработало 😃
Ползунки на картинке справа:

после замены движка…форум СДОХ!
Вроде форум фурычит.
Он наверное про еще уменьшившиеся количество народу.
после замены движка…форум СДОХ!
Тот движок был неудобный, но этот - полный отстой 😃 Даже вот когда на новой строчке пишешь предложение, почему-то не переносит его.
Ставьте два пробела перед переносом строки.
Вот так…
Походу тут и админы забили на этот форум. Как будто специально разваливали этот форум, чтобы забросить его и не видеть его даже в самом страшном сне).
Форум поднялся. Привет, подскажите подключил к ПК Jumper r1 v2 mini через sbus, телеметрию видит а на действия стиков не реагирует, куда копать ? Сегодня думал перепаять на другой канал, но решил у вас спросить.
Обычно согласно схеме припаивать на sbus разъем, телеметрию на tx2. В айнаве указывать uart2 как rx, а на softserial телеметрию. У вас же f405? У меня еще в свое время на матек f405 wing тупил sbus разъем, пришлось сделать инвертор и через него к rx2 и все работало.