AT-99 Gunship "Scorpion" из пены по мотивам фильма "Аватар"

Пламен, пора вам начинать делать серийно платы контроллера и продавать )))
Думаеш?
Пламен, пора вам начинать делать серийно платы контроллера и продавать )))
Присоединяюсь к коментарию , я бы купил за 100 евро 😋, только не знаю как с доставкой…
не люблю ждать и догонять проще самому сделать.
А вот вопросик - если модель увеличить раза в 3, поведение будет стабильнее или нет ?
Вот-так скорпион летает в игрушке:
да …крыльями машет как бабочка.:wacko:
Пламен, за такой ценник я бы 5 штук склепал:) , на сколько помню, на PIC и с гироскопами, без акселерометров?
Я на ARM с GPS ну и т.д. думаю как бы в сотку $ вложится, самосборный…
если модель увеличить раза в 3
Убийца будет, такого страшно вообще включать, хотя гравитация и аэродинамика, помоему для всех одинаковые
Виктор (native18), а вы моей прошивкой не баловались, а то может я чё накосячил как всегда?😃
проще самому сделать
Лучший вариант берём вот это вместо 48 атмеги ставим 168 добавляем 5-й 6-й разьём и заливаем прошивки вот отсюда😃
кстати в turnigy вешь неприятная есть, при потере сигнала приёмник газ потихоничку так незаметно прибавлять начинает, кольца аппарату нужны обязательно!!!
Ловить за пропеллеры неинтересно…
А вот ещё что в КУКе если нечаянно газ полностью убрать (даже кратковременно) в полёте, гиры перекалибруются, в лучшем случае дрова…
Просто я чёт всё больше боюсь своей каракатицы…
а я вот решил апу заказать или туриниги от НК или флй от LHb обе псевдо9каналки вроде поддерживают несколько моделей (надоело выдирать приемнйк из одной вертушки в другую)может кто дилему решит?
Виктор (native18), а вы моей прошивкой не баловались, а то может я чё накосячил как всегда?
Пока не было времени, но обязательно проверю, когда будет возможность.
а я вот решил апу заказать или туриниги от НК
У мня такая аппаратура, и два приемника, прекрасно работают. После перепрошивки вообще превращается в чудесную аппу, правда я не перепрошивал, хватает стоковых возможностей.
[QUOTE=SergDoc;2714961]Пламен, за такой ценник я бы 5 штук склепал:) , на сколько помню, на PIC и с гироскопами, без акселерометров?
У меня проект не комерсиялен!!!
Апропо, акселерометер болше мешает чем помоч!!! при взлйоте и посадки можна хоризонталности что то помоч но в воздохе ето не так, если ест и немножка ветер апарат должен для компенсаций под углом наоборот посоки ветра летат , угол пропорционален скорост ветра , ето не нравится акселерометра ,к сожеление ветер ест постояно и если работает толка акселерометер модел будет отлетат чорт знает где:)😃…если вам нужни дани для ускотение модела их можна получит если диференцируете дани жироскопа…Акселерометер дает информация для абсолютного состояние моделе… ЕТО ВАМ НЕ НУЖНО!! бистро будет работат если следится относителное сосотояние в протранстве и команда к серво механизм пропорционална разница двух састояния…
Извините про плохой руский язик , я учил в школе а ето било 30 лет таму назад…
Пока не было времени, но обязательно проверю, когда будет возможность.
У мня такая аппаратура, и два приемника, прекрасно работают. После перепрошивки вообще превращается в чудесную аппу, правда я не перепрошивал, хватает стоковых возможностей.
У меня тоже , работает прекрасно!!!
Лучший вариант берём вот это вместо 48 атмеги ставим 168 добавляем 5-й 6-й разьём и заливаем прошивки вот отсюда
Спасибо за подсказку, - будем, подумать.
А насчет размера - убить можно и булавкой, “нравственной или безнравственной науку - делает человек” (из фильма Тарковского “Солярис”).
Мене нужен большой, чтобы мог 3-5 кг ворочать на большой высоте, вне населенных пунктов-для обеспокоенных, ну к примеру на Марсе.
Ну это надо гексакоптер какой нибудь, да и мозги ему нужны мегастабильные
у меня пока кроме крашей на сверхнизкой высоте пока больше ничего не получалось:)
уж больно нестабильный аппарат получается
Ну это надо гексакоптер какой нибудь, да и мозги ему нужны мегастабильные
у меня пока кроме крашей на сверхнизкой высоте пока больше ничего не получалось:)
уж больно нестабильный аппарат получается
Вот мой гексакоптер с мозг на PIC-е…
Вот мой гексакоптер с мозг на PIC-е…
АППАРАТ То что надо, стабильный большегруз:)
Ну это надо гексакоптер какой нибудь, да и мозги ему нужны мегастабильные
у меня пока кроме крашей на сверхнизкой высоте пока больше ничего не получалось
уж больно нестабильный аппарат получается
По моему Вы не там ищете , из опыта руления моделей понял - чем больше модель тем стабильнее в полете.
И еще пропеллер не крыло слишком много шансов срыва воздушного потока, надо искать что-то среднее, вот идея КАМЕРОНА мне понравилась и у него (теоретически) лопасти вертолетного типа а не пропеллеры, и тем паче импеллеры .
Вообще меня интересует аппарат с максимальным К.П.Д. с возможностью вертикального взлета, но у всех мега-супер-пупер-коптеров коэфициент полезного действия ниже плинтуса😈, в аэро-динамике правит всем несущая плоскость❗, вот по этому я в этой ветке форума.
😇Двух-роторник наиболее перспективный вариант по экономичности, после вертушек, и у него есть возможность горизонтального полета - по самолетному.
А на счет мозгов, пора на четырех-ядерники переходить (по ринципу коптеров), Атмега, Пик - прошлый век хороши для опрбывания и изучения софта, даже на мобильнике можно такое руление забабахать😈…Хотя почему-можно яблочники давно приторговывают, правда управление по блютусу…
Всем удачи.😒
Вот мой гексакоптер с мозг на PIC-е…
Вещь конечно КЛАССНАЯ, но хотелось-бы поподробней про начинку, как и чем рулит желательно схемы (раз не комерческая тайна)и про программирование если можно.
Осталось научить аппараты летать по заданному маршруту (с дозаправкой в воздухе - шутка).
Двух-роторник наиболее перспективный вариант по экономичности, после вертушек, и у него есть возможность горизонтального полета - по самолетному. А на счет мозгов, пора на четырех-ядерники переходить
К сожеление ето не совсем так, горизонталной полет двухроторника не совсем как самолет
, когда вертикалнои полет мотори работает как аилерон, в хоризонтал как рудер, 45 градусов наклон мотора приблизително комада должна переити от аилерон к рудер и наоборот, ето очен критично…
Про четирех-ядреники у меня вот как:
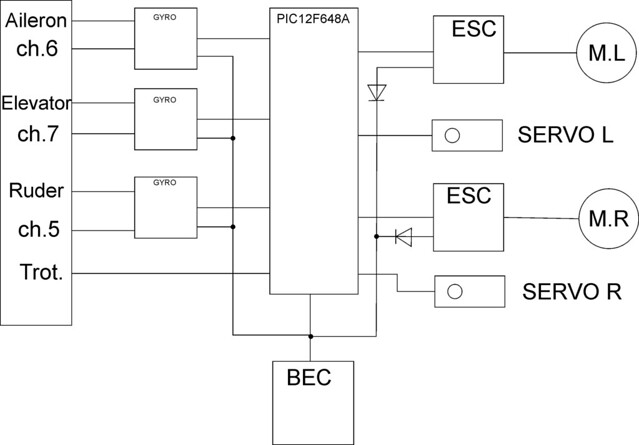
Вот блок схема контролера:
www.flickr.com/photos/…/photostream/
К сожеление ето не совсем так, горизонталной полет двухроторника не совсем как самолет
, когда вертикалнои полет мотори работает как аилерон, в хоризонтал как рудер, 45 градусов наклон мотора приблизително комада должна переити от аилерон к рудер и наоборот, ето очен критично…
Согласен, что в горизонтале не совсем самолет, теоретически даже выгодней самолета(меньше аэродинамическое сопративление, короче нет несущих крыльев). А насчет переходного режима - проблема конечно, но я думаю решаемая.
Фотографировать, Пламен, не пробуете у Вас в Болгарии ТАКИЕ ХОРОШИЕ, КРАСИВЫЕ МЕСТА, вот стану миллионером (как обещают уже 15 лет президенты) обязательно поеду в Болгарию.
Двух-роторник наиболее перспективный вариант по экономичности, после вертушек, и у него есть возможность горизонтального полета - по самолетному.
У меня складывается впечатление, что Вы не совсем правильно представляете принцип двуроторного типа скорпионо-подобных.
а) Не о какой экономичности там речи не идет: Роторы работают в режиме статической тяги. Это неудобный режим для винта и естественно мотор жрет при этом как слон. Малый диаметр винтов в сравнении с классической схемой вертолетов так же не способствует экономичности в связи с малой ометаемой поверхностью.
б) по самолетному он так же не летает, это вертолет в чистом виде с вертолетным-же управлением.
Похоже Ваш вариант это схема Bell V-22 Osprey
У него классический вертолетный винт с циклическим и общим шагом. И возможность перехода в самолетный режим, с опорой на крыло в горизонтальном полете.
Фотографировать, Пламен, не пробуете у Вас в Болгарии ТАКИЕ ХОРОШИЕ, КРАСИВЫЕ МЕСТА, вот стану миллионером (как обещают уже 15 лет президенты) обязательно поеду в Болгарию.
Ето так Болгария очен красивая!!! Приходите!! Будете мой гост!!!
а) Не о какой экономичности там речи не идет: Роторы работают в режиме статической тяги. Это неудобный режим для винта и естественно мотор жрет при этом как слон. Малый диаметр винтов в сравнении с классической схемой вертолетов так же не способствует экономичности в связи с малой ометаемой поверхностью. б) по самолетному он так же не летает, это вертолет в чистом виде с вертолетным-же управлением. Похоже Ваш вариант это схема Bell V-22 Osprey У него классический вертолетный винт с циклическим и общим шагом. И возможность перехода в самолетный режим, с опорой на крыло в горизонтальном полете.
Так точна!!!
Пик - прошлый век хороши для опрбывания и изучения софта, даже на мобильнике можно такое руление забабахать…Хотя почему-можно яблочники давно приторговывают, правда управление по блютусу…
Яблочный дрон на ARM9 и управляется по Wi-Fi, с возможностью подключения обычной аппы, правда через ардуино…
Вот блок схема контролера:
Палмен, я так понял у вас PIC выступает в роли PID-регуляторов?
Про четирех-ядреники у меня вот как:
Владимир имел ввиду четырёхядерный процессор, но я не встречал таких, Propeller parallax - 8- ми ядерный есть, и то ставят два один для коптера второй для камеры…
Палмен, я так понял у вас PIC выступает в роли PID-регуляторов?
так точна, с начале ест ,глитч филтер, а потом ПИД на каждом канале и наконец PWM…
Владимир имел ввиду четырёхядерный процессор, но я не встречал таких, Propeller parallax - 8- ми ядерный есть, и то ставят два один для коптера второй для камеры…
Извини я не понялл правилно…
У меня камера въиглядит так:
У меня складывается впечатление, что Вы не совсем правильно представляете принцип двуроторного типа скорпионо-подобных.
Так , оживление в теме, я имел в виду что-то типа trekaero.com/Trek_VTOL_Springtail_Vehicles.htm или ru.wikipedia.org/wiki/Doak_VZ-4,
а) ни кто не запрещает применение динамической тяги, типа циклики или изменение шага
Малый диаметр винтов в сравнении с классической схемой вертолетов
просто заставляет увеличить “ометаемую” поверхность ,то есть увеличить число и площадь плоскостей, весь вопрос на сколько и как.
б) “Скорпион” конкретно по самолетному точно не летает, вернее он не летает вообще, и даже не существует в металле, НО подобный аппарат должен летать по самолетному ЭТО ЕГО ГЛАВНОЕ предназначение (по моему), но с малым количеством несущих плоскостей - ну типа крылатой ракеты.
Вы все еще путаете термины статической и динамической тяги,
Статическая тяга в нашем случае - описывает величину вертикальной тяги, создаваемой силовой установкой в момент когда аппарат находится в неподвижном состоянии относительно среды (воздуха).
Это относится ко всем аппаратам, умеющим висеть в воздухе, так же, как аппарат, показанный Вами в первой ссылке.
По второй ссылке у вас показан конвертоплан, это аппарат может находится в двух состояниях:
- умеющий висеть по вертолетному, СУ поставлены вертикально, и создается вертикальная тяга.
- самолетный вариант: СУ поставлены горизонтально, создается горизонтальная тяга. В этом случае нагрузка ложится на крыло.
Скорпионоподобные никогда не будут летать по самолетному, по простой причине: У них нет крыльев
с малым количеством несущих плоскостей - ну типа крылатой ракеты.
С крылатой ракетой так же сравнивать нельзя из-за разницы в скорости. Наличие реактивного двигателя и большой горизонтальной тяги дает большую скорость, что позволяет даже на небольшом крыле создать необходимую подъемную силу.
Почитайте внимательнее про вертолеты и узнаете, что максимальная возможная скорость для вертолетов 450-500км/ч, далее он заваливается на бок, т.е беспорядочно падает.
Также почитайте разницу между вертолетом и конвертопланом. У Вас чувствуется нехватка теории. Без обид.
Также почитайте разницу между вертолетом и конвертопланом. У Вас чувствуется нехватка теории. Без обид.
Какие обиды?😒 Наоборот я Вам очень благодарен, за возможность нормально обсудить проект.😆
Теперь по существу; у вертушек слишком большая разница скорости вращения на оси и на краях ротора, в силу большого относительного диаметра ротора, то есть геометрия вертолетной лопасти ближе по форме к обычному крылу у самолета, а для достижения скорости профиль должен быть как у пропеллера - С РАЗНЫМ ШАГОМ по радиусу, (представляете фигуру на большом удлиннении), ближе к оси закретические углы атаки, а на краях нулевые.
В турбинах делают маленькие лопатки, ставя их на большом радиусе (сохраняя до критичные углы атаки по всей длинне лопаток) - это и есть решение проблемы разности угловых скоростей несущей плоскости. Ведь не будете вы утверждать что у турбин нет рабочих плоскостей? А скорости там не маленькие.
С крылатой ракетой так же сравнивать нельзя из-за разницы в скорости
Приближение формы лопастей роторов к пропеллерной или турбинной геометрии и позволит развивать скорости порядка 800-900км/ч, то есть роторы, по принципу работы должны быть ближе к турбо-вентиляторам , чем к вертушкам.
В принципе МИ-12 оптимальная конструкция по подъему тяжестей, нужно только научить её носиться со скоростью Ту-95.(скрестить ежа с ужом - моя задача , шутка)
Ну как-то так.😃