Cheerson CX-20 клон квадрокоптера DJI Phantom

С чего бы?
Физика у него такая! Чем меньше шаг винта, тем он больше тянет (при том же моменте).
Сток сам по себе вполне летучий, а всё, что сверху навешивается на слабое ВМГ - всё в ущерб идёт. И “относительное чЮть улучшение” кардинально дело не меняет.
В этой ветке копы хоть и собираются … “по одной схеме на одном …заводе”, но в любом случае ВСЁ и ВСЯ надо подбирать строго под свой коп и задачи. И вес и обвес и настройка - сугубо индивидуально. От общих можно только отталкиваться и ориентироваться.
Чем меньше шаг винта, тем он больше тянет.
Вот теперь точно попробую … 😃
Физика у него такая! Чем меньше шаг винта, тем он больше тянет (при том же моменте).
Если ваша физика противоречит объективной реальности - значит, что-то с ней не то… 😁
Максимальные обороты мотора определяются напряжением питания (это как раз-таки параметр kV), а его тяга определяется количеством отбрасываемого воздуха, которое пропорционально шагу. Именно поэтому на 250-ках одинаковая тяга на 3s и 4s аккумах получается в том случае, когда на 3s стоят пропеллеры с бОльшим шагом и более широкими лопастями, чем на 4s при равном диаметре. Кроме того, на 3s иногда используют и 6" пропеллеры, а на 4s - только 5"
По идее тяга будет еще больше, а потребляемый ток меньше.
А ещё вы здесь противоречите банальному закону сохранения энергии. 😁
Поскольку подводимая к мотору мощность пропорционально току (так как напряжение фиксировано). Итого “мощность на моторе меньше, а тяга больше” - это минимум Нобелевка 😁
Кто какое значение ставит потнапряжению для срабатывания фэилсэйв? Напряжение же скачет при разной нагрузке
Чтобы предотвратить срабатывание FS от мгновенных просадок напряжения должно выполняться условие - снижение напряжения ниже установленного FS более 10 сек.
Единого оптимального значения быть не может- все батареи разные. По хорошему нужно с каждого аккума периодически снимать нагрузочную кривую, чтобы знать достоверный запас хода. И с учетом этого перед полетом выставлять уровень FS. Или иметь ступенчатое оповещение. У меня на Радиолинке аппа сигнализирует при 10.7, а FS выставлен на 10.6 Так же хорошо отслеживать израсходованную емкость используя Power module. Залитая перед полетом емкость - самая свежая информация о батареи
Кто какое значение ставит потнапряжению для срабатывания фэилсэйв? Напряжение же скачет при разной нагрузке
Я оставил стандартное - 10.5В
А вообще самый лучший ФС - мозг! Я например знаю, что мой коптер может “безопасно” пролететь максимум 4000м. На OSD эта информация есть. Ну это если на напряжение не смотреть.
На какой прошивке ? Глитчи есть ?
3.2.1 глитчей нет (8-у поколение чипов ublox, BN-880, ловит 18-20 спутников), специально попробую и на 3.1.5, так как почитывал здесь, что у многих проблемы, вот и будет хороший повод проверить конфиги разработчиков и одинаково ли они хороши для разных версий прошивок
Сначала попробую Loiter Rate kI покрутить. По-умолчанию оно 0.5, попробую от 0.3 до 0.7 - погляжу как меняется поведение в Loiter.
Покрутил, полетал… - ничего не понял! Как назло ветер стих и каких-то сильных изменений я не замечал. “Вроде” показалось, что немного ровнее висит при I=0.4 - оставлю пока так. Но т.к. был штиль, коптер и так висел “как прибитый”.
попробую и на 3.1.5
Там прото-кол другой надо каа-ца (на 3.1.5) - у меня на стоке 3.1.2 старый ещё стоит (до экспери-ментов так ручки и не дошли, но вполне живёт).
Если ваша физика противоречит объективной реальности - значит, что-то с ней не то…
По ссылке тесты винтов разного диаметра и примерно одинакового шага. Естественно при увеличении диаметра винта тяга увеличивается, но и потребляемая мощность мотора тоже.
А ещё вы здесь противоречите банальному закону сохранения энергии.
Поскольку подводимая к мотору мощность пропорционально току (так как напряжение фиксировано). Итого “мощность на моторе меньше, а тяга больше” - это минимум Нобелевка
Никакой нобелевки.
Речь про статическую тягу.
В общем при таких ответах, нет никакого желания объяснят простые истины.
И физика эта проверена неоднократно, в том числе и мною, но на самолетиках. На квадриках пока не экспериментировал с винтами. Собственно и вопрос был именно к тем кто пробовал, а не к любителям потролить.
но на самолетиках.
Если ДВС ,то да с меньшим шагом моторчик лучше раскручивается,но на электро -нет,тут обороты определяет KV и с меньшим шагом -меньше тяга.Просто на самолёте винт работает в потоке,а на коптере поток воздуха не тот.Возьмите и погоняйте моторы и убедитесь сами!!!
Там прото-кол другой надо каа-ца (на 3.1.5) - у меня на стоке 3.1.2 старый ещё стоит (до экспери-ментов так ручки и не дошли, но вполне живёт).
начиная с версии 3.2 удалена поддержка NMEA, SIRF на APM из-за нехватки flash памяти свободной - такие объяснения от разработчиков
но протокол UBX всегда был и в 3.1.2 и в 3.1.5, конфигурационные файлы по моей ссылке выше только UBX и оставляют, кстати и периодичность оставляют 4Hz
могу только предположить то, что когда GPS модуль выдаёт много сообщений да ещё и одновременно и в NMEA и в UBX и слишком часто, то вполне могут случаться глитчи из-за нехватки скорости на APM в какие-то моменты при обработке поступающей в порт информации слишком много (ненужные сообщения) и слишком часто, поэтому думаю следует залить конфигурационные файлы в модули ublox от разработчиков, они отключили все лишние и ненужные сообщения и оставили только то, что они обрабатывают
кстати в 3.2.1 есть такой параметр как протокол gps, по умолчанию стоит auto, поставил ubx, чтобы меньше думал, что же там gps выдаёт
и ещё один момент, почему конфигурация от разработчиков наиболее оптимальная - для разных типов сообщений от модуля GPS критических и не очень настраивается разная периодичность
Никакой нобелевки.
Речь про статическую тягу.В общем при таких ответах, нет никакого желания объяснят простые истины.
Не вижу смысла спорить с упёртым. Покупайте пропеллеры, ставьте датчик тока, а лучше замеряйте тягу и ток на стенде, как делают грамотные люди:
И не забудьте отписаться о результате. 😃
А так - одно пустофлудие.
Не вижу смысла спорить с упёртым.
Это еще кто из нас упертый. Второй раз приводите тесты винтов с одинаковым шагом.
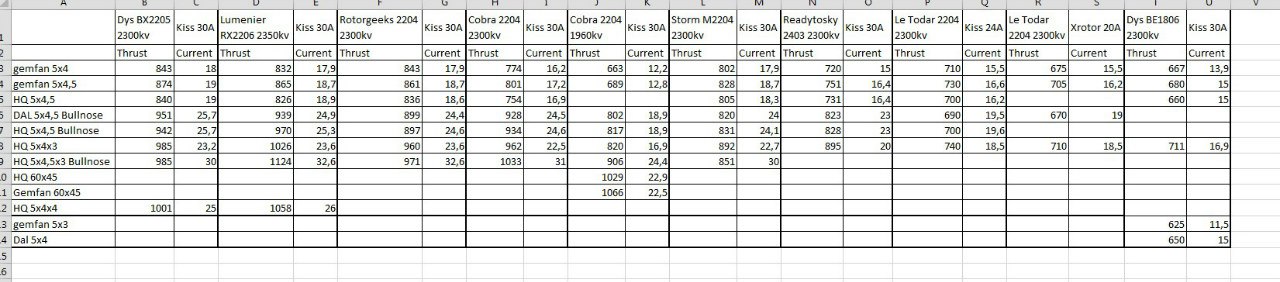
Хорошо давайте глянем на цифры из вашей таблички.
Смотрим два теста:
GemFan 5x4 тяга 843 ток 18
и
GemFan 5x4.5 тяга 874 ток 19
Напряжение к сожалению не указано, допустим акк 3S, примем напряжение в 12В.
Итого на первом винте потребляемая мощность 216Вт на втором 228Вт.
Смотрим удельную тягу, на первом 3,9г/Вт на втором 3,8г/Вт.
Разница конечно небольшая но все равно у винта с меньшим шагом результат лучше.
Опять же данные из таблички очень приблизительные, ток замерен с точностью до ампера, напряжение вообще не указано и винты почти одинаковые.
А так - одно пустофлудие.
Я всего лишь задал простой вопрос, но в лучших традициях этого форума развели флуд, а ответа так и нет. Значит никто не пробовал, это понятно. Зато пофлудить всегда есть желающие.
Если ДВС ,то да с меньшим шагом моторчик лучше раскручивается,но на электро -нет,тут обороты определяет KV и с меньшим шагом -меньше тяга.Просто на самолёте винт работает в потоке,а на коптере поток воздуха не тот.
Это вообще шедеврально!
тут обороты определяет KV
Ну ну. Возьмите сначала калькулятор и умножьте KV на напряжение акка. А потом тахометр и замеряйте реальные обороты мотора с винтом. Будете сильно удивлены!
Просто на самолёте винт работает в потоке,а на коптере поток воздуха не тот.
Самолеты тоже разные бывают и летать могут по разному и воздух там точно такой же, вместе с потоками.
Отличные данные! Как добились?
Во первых поменял моторки на такие, так как предыдущие из за того что клеил на них магниты, по ходу оказались сильно разбалансированны. Во вторых купил в ашане силиконовый двойной уплотнитель для дверей и окон и отрезав 2 кусочка по ширине корпуса контроллера, приклеил их самоклеящей стороной к корпусу и суперклеем к плате разводки питания. Короче контроллер сейчас сидит на уплотнителе. Как нить полезу внутрь, сфоткаю это дело ))
Отлетал штук 10 батареек нормально, а сегодня снова появились глитчи. Хрен его знает с чем все таки это связанно, в логах пишет что 0 спутников и хдоп 1.7 к примеру. Короче какой то глюк непонятный. Сегодня квадрик переодически начинал унитазить, сделал компассмот но нормально проверить не смог - начался дождь, но по ощущениям вроде стабильней висеть стал и унитаза нет. Блин либо у нас тут какая то аномалия, либо у меня квадрик живой и летает по настроению. Кстати на высоте примерно в 50 метров висит как прибитый, а как опустишься до 10-5 метров начинает дергаться.
Я всего лишь задал простой вопрос
Вообще-то вам на него ответили сразу - с уменьшением шага тяга уменьшится, как и ток.
Вы не согласились и развели софистику.
Напряжение к сожалению не указано, допустим акк 3S, примем напряжение в 12В.
Если чуть-чуть ПОДУМАТЬ - на гоночных дронах 3s не используется. По той же причине, по какой дизтопливо не используют в “Формуле-1” 😁
Разница конечно небольшая но все равно у винта с меньшим шагом результат лучше.
Вывод, мягко говоря, притянут (выдернут один лишь “удобный” результат) - лишь бы подогнать под свою теорию.
Прям по старой шутке физиков: “Через любую сколь угодно точно полученную экспериментальную точку можно провести любую теоретическую кривую”
Кроме того, вам даже в голову не пришло, что ширина лопастей там разная.
А в общем и целом, если посмотреть на таблицу, то закономорность иная. Больше шаг - больше тяга - больше ток. Вариации вызваны геометрией и количеством лопастей. А так же жесткостью пропеллеров - она тоже разная.
Ещё раз повторяю - покупайте пропеллеры и стенд, проводите замеры на примерно одинаковом профиле лопастей, равном диаметре и разном шаге. И тогда уже анализируйте результаты (они вас неприятно удивят - но это ваши проблемы). А пока вы тянете лишь на “диванного теоретика” - и не более.
Самолеты тоже разные бывают и летать могут по разному и воздух там точно такой же, вместе с потоками.
Похоже вы банально не поняли, что вам пытались сказать - к вопросу о “диванном теоретике”
3.2.1 глитчей нет (8-у поколение чипов ublox, BN-880, ловит 18-20 спутников), специально попробую и на 3.1.5, так как почитывал здесь, что у многих проблемы, вот и будет хороший повод проверить конфиги разработчиков и одинаково ли они хороши для разных версий прошивок
я заливал эти конфиги в свои модули, и в 7 и 8 модель. с этими конфигами в у-центре работа модулей какая то странная как по мне. данные как то появляются резко и зависают и потом опять появляются и зависают и так постоянно. а при стоковой прошивке но подправленной на скорость 38400 и протоколе UBX+NMEA данные показываются стабильно без прерываний и зависаний.
Блин либо у нас тут какая то аномалия
По вашему последнему логу у вас есть даже две “аномалии” 😃
EKF_CHECK_THRESH 0.8
DCM_CHECK_THRESH 0.8
Лучше бы их загнать в ноль 😃
я заливал эти конфиги в свои модули, и в 7 и 8 модель. с этими конфигами в у-центре работа модулей какая то странная как по мне. данные как то появляются резко и зависают и потом опять появляются и зависают и так постоянно. а при стоковой прошивке но подправленной на скорость 38400 и протоколе UBX+NMEA данные показываются стабильно без прерываний и зависаний.
тоже перед использованием смотрел в консоли в u-center - пакеты шли с одинаковой периодичностью и только одно сообщение шло с меньшей периодичностью (что и требовал конфиг для него), создавалось впечатление, что выброс резкий, но это нормально, вопрос только в том, что зачем одновременно пичкать контроллер UBX+NMEA
возможно не по теме…
наткнулся на такой вариант новой версии Nova Pro
интересненько даже очень
hobbyking.com/…/__80718__Quanum_Nova_PRO_With_Radi…
По вашему последнему логу у вас есть даже две “аномалии” 😃
EKF_CHECK_THRESH 0.8
DCM_CHECK_THRESH 0.8
Лучше бы их загнать в ноль 😃
Хм…я тоже летаю с такими значениями. А что будет если 0? Что они задают?
Если чуть-чуть ПОДУМАТЬ - на гоночных дронах 3s не используется. По той же причине, по какой дизтопливо не используют в “Формуле-1”
Откуда у Вас такая самоуверенность ? У меня стоковый Racer 250 с трехбаночным , летает отлично и многие у нас на 3S летают …Понятно что 4S лучше и мощнее но это уже соревнования и тд… Значит мы тут на гоночных не очень в теме…
Хм…я тоже летаю с такими значениями. А что будет если 0? Что они задают?
Вот обсуждение этих параметров фильтров Кальмана основной вывод установка фильтров Кальмана в 0.
по поводу параметров
EKF_CHECK_THRESH
DCM_CHECK_THRESH
разработчики утверждают, что EKF (Extended Kalman Filter) работает только на платформах pixhawk, по всей видимости из-за нехватки ресурсов у APM там он не работает
вернёмся же к параметрам ***_CHECK_TRESH
проверка EKF работает только на pixhawk и то только при условии, что AHRS_EKF_USE = 1
поэтому мне совершенно не понятно как этот параметр может влиять на полёты по сообщениям в данной ветке от людей, которые обнулили его в 0, т.е. при 0.8 у них бывали проблемы, а при 0 всё стало замечательно, может у кого-то есть пояснения
возможно другое дело это параметра DCM_CHECK_TRESH, он отвечает на срабатывания failsafe при расхождениях положения более, чем на 60 градусов в течение как минимум 1 секунды, сам же параметр задаёт чувствительность
основное назначение этих приблуд (не ведём речь о самом фильтре EKF) исключить так называемые улёты в Китай и прочие неприятности, т.е. срабатывает failsafe и выполняется определённое действие
источник информации
ardupilot.org/copter/docs/ekf-inav-failsafe.html