Cheerson CX-20 клон квадрокоптера DJI Phantom

Никакой нобелевки.
Речь про статическую тягу.В общем при таких ответах, нет никакого желания объяснят простые истины.
Не вижу смысла спорить с упёртым. Покупайте пропеллеры, ставьте датчик тока, а лучше замеряйте тягу и ток на стенде, как делают грамотные люди:
И не забудьте отписаться о результате. 😃
А так - одно пустофлудие.
Не вижу смысла спорить с упёртым.
Это еще кто из нас упертый. Второй раз приводите тесты винтов с одинаковым шагом.
Хорошо давайте глянем на цифры из вашей таблички.
Смотрим два теста:
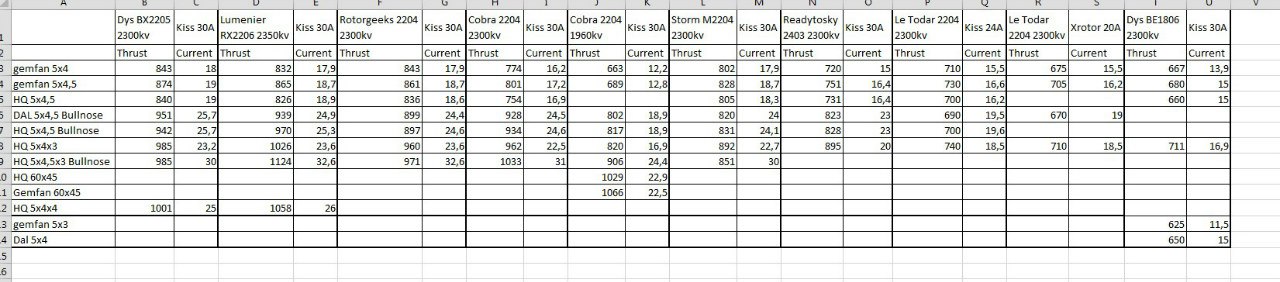
GemFan 5x4 тяга 843 ток 18
и
GemFan 5x4.5 тяга 874 ток 19
Напряжение к сожалению не указано, допустим акк 3S, примем напряжение в 12В.
Итого на первом винте потребляемая мощность 216Вт на втором 228Вт.
Смотрим удельную тягу, на первом 3,9г/Вт на втором 3,8г/Вт.
Разница конечно небольшая но все равно у винта с меньшим шагом результат лучше.
Опять же данные из таблички очень приблизительные, ток замерен с точностью до ампера, напряжение вообще не указано и винты почти одинаковые.
А так - одно пустофлудие.
Я всего лишь задал простой вопрос, но в лучших традициях этого форума развели флуд, а ответа так и нет. Значит никто не пробовал, это понятно. Зато пофлудить всегда есть желающие.
Если ДВС ,то да с меньшим шагом моторчик лучше раскручивается,но на электро -нет,тут обороты определяет KV и с меньшим шагом -меньше тяга.Просто на самолёте винт работает в потоке,а на коптере поток воздуха не тот.
Это вообще шедеврально!
тут обороты определяет KV
Ну ну. Возьмите сначала калькулятор и умножьте KV на напряжение акка. А потом тахометр и замеряйте реальные обороты мотора с винтом. Будете сильно удивлены!
Просто на самолёте винт работает в потоке,а на коптере поток воздуха не тот.
Самолеты тоже разные бывают и летать могут по разному и воздух там точно такой же, вместе с потоками.
Отличные данные! Как добились?
Во первых поменял моторки на такие, так как предыдущие из за того что клеил на них магниты, по ходу оказались сильно разбалансированны. Во вторых купил в ашане силиконовый двойной уплотнитель для дверей и окон и отрезав 2 кусочка по ширине корпуса контроллера, приклеил их самоклеящей стороной к корпусу и суперклеем к плате разводки питания. Короче контроллер сейчас сидит на уплотнителе. Как нить полезу внутрь, сфоткаю это дело ))
Отлетал штук 10 батареек нормально, а сегодня снова появились глитчи. Хрен его знает с чем все таки это связанно, в логах пишет что 0 спутников и хдоп 1.7 к примеру. Короче какой то глюк непонятный. Сегодня квадрик переодически начинал унитазить, сделал компассмот но нормально проверить не смог - начался дождь, но по ощущениям вроде стабильней висеть стал и унитаза нет. Блин либо у нас тут какая то аномалия, либо у меня квадрик живой и летает по настроению. Кстати на высоте примерно в 50 метров висит как прибитый, а как опустишься до 10-5 метров начинает дергаться.
Я всего лишь задал простой вопрос
Вообще-то вам на него ответили сразу - с уменьшением шага тяга уменьшится, как и ток.
Вы не согласились и развели софистику.
Напряжение к сожалению не указано, допустим акк 3S, примем напряжение в 12В.
Если чуть-чуть ПОДУМАТЬ - на гоночных дронах 3s не используется. По той же причине, по какой дизтопливо не используют в “Формуле-1” 😁
Разница конечно небольшая но все равно у винта с меньшим шагом результат лучше.
Вывод, мягко говоря, притянут (выдернут один лишь “удобный” результат) - лишь бы подогнать под свою теорию.
Прям по старой шутке физиков: “Через любую сколь угодно точно полученную экспериментальную точку можно провести любую теоретическую кривую”
Кроме того, вам даже в голову не пришло, что ширина лопастей там разная.
А в общем и целом, если посмотреть на таблицу, то закономорность иная. Больше шаг - больше тяга - больше ток. Вариации вызваны геометрией и количеством лопастей. А так же жесткостью пропеллеров - она тоже разная.
Ещё раз повторяю - покупайте пропеллеры и стенд, проводите замеры на примерно одинаковом профиле лопастей, равном диаметре и разном шаге. И тогда уже анализируйте результаты (они вас неприятно удивят - но это ваши проблемы). А пока вы тянете лишь на “диванного теоретика” - и не более.
Самолеты тоже разные бывают и летать могут по разному и воздух там точно такой же, вместе с потоками.
Похоже вы банально не поняли, что вам пытались сказать - к вопросу о “диванном теоретике”
3.2.1 глитчей нет (8-у поколение чипов ublox, BN-880, ловит 18-20 спутников), специально попробую и на 3.1.5, так как почитывал здесь, что у многих проблемы, вот и будет хороший повод проверить конфиги разработчиков и одинаково ли они хороши для разных версий прошивок
я заливал эти конфиги в свои модули, и в 7 и 8 модель. с этими конфигами в у-центре работа модулей какая то странная как по мне. данные как то появляются резко и зависают и потом опять появляются и зависают и так постоянно. а при стоковой прошивке но подправленной на скорость 38400 и протоколе UBX+NMEA данные показываются стабильно без прерываний и зависаний.
Блин либо у нас тут какая то аномалия
По вашему последнему логу у вас есть даже две “аномалии” 😃
EKF_CHECK_THRESH 0.8
DCM_CHECK_THRESH 0.8
Лучше бы их загнать в ноль 😃
я заливал эти конфиги в свои модули, и в 7 и 8 модель. с этими конфигами в у-центре работа модулей какая то странная как по мне. данные как то появляются резко и зависают и потом опять появляются и зависают и так постоянно. а при стоковой прошивке но подправленной на скорость 38400 и протоколе UBX+NMEA данные показываются стабильно без прерываний и зависаний.
тоже перед использованием смотрел в консоли в u-center - пакеты шли с одинаковой периодичностью и только одно сообщение шло с меньшей периодичностью (что и требовал конфиг для него), создавалось впечатление, что выброс резкий, но это нормально, вопрос только в том, что зачем одновременно пичкать контроллер UBX+NMEA
возможно не по теме…
наткнулся на такой вариант новой версии Nova Pro
интересненько даже очень
hobbyking.com/…/__80718__Quanum_Nova_PRO_With_Radi…
По вашему последнему логу у вас есть даже две “аномалии” 😃
EKF_CHECK_THRESH 0.8
DCM_CHECK_THRESH 0.8
Лучше бы их загнать в ноль 😃
Хм…я тоже летаю с такими значениями. А что будет если 0? Что они задают?
Если чуть-чуть ПОДУМАТЬ - на гоночных дронах 3s не используется. По той же причине, по какой дизтопливо не используют в “Формуле-1”
Откуда у Вас такая самоуверенность ? У меня стоковый Racer 250 с трехбаночным , летает отлично и многие у нас на 3S летают …Понятно что 4S лучше и мощнее но это уже соревнования и тд… Значит мы тут на гоночных не очень в теме…
Хм…я тоже летаю с такими значениями. А что будет если 0? Что они задают?
Вот обсуждение этих параметров фильтров Кальмана основной вывод установка фильтров Кальмана в 0.
по поводу параметров
EKF_CHECK_THRESH
DCM_CHECK_THRESH
разработчики утверждают, что EKF (Extended Kalman Filter) работает только на платформах pixhawk, по всей видимости из-за нехватки ресурсов у APM там он не работает
вернёмся же к параметрам ***_CHECK_TRESH
проверка EKF работает только на pixhawk и то только при условии, что AHRS_EKF_USE = 1
поэтому мне совершенно не понятно как этот параметр может влиять на полёты по сообщениям в данной ветке от людей, которые обнулили его в 0, т.е. при 0.8 у них бывали проблемы, а при 0 всё стало замечательно, может у кого-то есть пояснения
возможно другое дело это параметра DCM_CHECK_TRESH, он отвечает на срабатывания failsafe при расхождениях положения более, чем на 60 градусов в течение как минимум 1 секунды, сам же параметр задаёт чувствительность
основное назначение этих приблуд (не ведём речь о самом фильтре EKF) исключить так называемые улёты в Китай и прочие неприятности, т.е. срабатывает failsafe и выполняется определённое действие
источник информации
ardupilot.org/copter/docs/ekf-inav-failsafe.html
От третьего лица как раз не много, что даёт. А вот с борта в висении и в движении очень бы хотелось увидеть.
ну вот с недавних полетушек кусок
только он мало что даст, т.к. ветер был несильный и стабильный, хотя может наверху и побольше колбасило…
а нового снять пока не могу. решил я коптер облегчить, а то как писал 1340 грамм уже навешано полетного…
снял телеметрию (вывел хвост наружу для подключения по необходимости), убрал выносной стенд для модуля гпс/компасс, проводов лишних, разъемов и прочего, в общем теперь он весит 1260 грамм.
ну думаю - супер!
вышел полетать и сразу крашнул его (несильно с высоты метра два в лойтере вдруг просел сразу до земли и перевернулся - минус два винта)…
при этом до краша - лойтер точку держит из рук вон плохо (спутников 10 правда, т.к. пасмурно), в альтхолоде колбасит и прочее, ну и ветер у нас щас сильный, порывистый, но все равно имхо сущетсвенно хуже поведение чем до “похудения”…
не понял - начал разбираться, оказывается:
- вибрации выросли - вот блин перетряс называется провода внутри по компактному… расстроен…
- компас вообще раскалиброван, ну думаю странно, может из-за того что ниже стал (приклеил модуль на место штатной башни), пробую заново откалибровать - фига, восток и юг четко, запад и север +/-15 градусов. ни в какую, раз пять пробовал. и че за хрень? вот ниче не понимаю… попробую опять на Gps stand ставить…
вот говорят - от добра добра не ищут… ведь идеально летал, и че я полез в него…
бесит эта капризность! уже смотрю на фантик все пристальнее…
поэтому мне совершенно не понятно как этот параметр может влиять на полёты по сообщениям в данной ветке от людей, которые обнулили его в 0, т.е. при 0.8 у них бывали проблемы,
Вы себе противоречите. 😃 С одной стороны вы выключаете протокол NMEA, чтобы сократить возможное число обращений, а с другой удивляетесь, как может вредить включение сложной процедуры обсчета, которую наш контроллер не в состоянии толком обслуживать.
Вот тут был впечатляющий пример лога arduplotter.com/view/56ffab396e196b011409ecfa#mess… Взгляните на Messages.
Вы себе противоречите. С одной стороны вы выключаете протокол NMEA, чтобы сократить возможное число обращений, а с другой удивляетесь, как может вредить включение сложной процедуры обсчета, которую наш контроллер не в состоянии толком обслуживать 😃
не сказал бы, так как верю разработчикам, а они утверждают, что EKF не просчитывается на платформе APM, даже ссылку приводил на оригинал
лог посмотрю, кто-то что-то не договаривает 😃
компас вообще раскалиброван, ну думаю странно, может из-за того что ниже стал (приклеил модуль на место штатной башни), пробую заново откалибровать - фига, восток и юг четко, запад и север +/-15 градусов. ни в какую, раз пять пробовал. и че за хрень? вот ниче не понимаю… попробую опять на Gps stand ставить…
Может отверточкой намагниченной попользовались?
так как верю разработчикам,
Надеюсь вы принимаете в расчет, что у нас прошивки то не слишком официальные. Правленые, кастомизированные. А теперь плавно перейдем к вопросу калибровки компаса со cтиков 😲
А вот здесь упоминается, что она все же просчитывается, но используется только как справочная. ardupilot-mega.ru/…/version-3-2-apmcopter-firmware…
Надеюсь вы принимаете в расчет, что у нас прошивки то не слишком официальные. Правленые, кастомизированные. А теперь плавно перейдем к вопросу калибровки компаса со cтиков 😲
в инструкции не сказано, что это именно калибровка компаса 😃
подозреваю, что слишком сильно верите в китайцев, а именно в то, что они могли что-то существенное изменить в самой прошивке касательно управления
и эта загадочная процедура была и в APM ранних версий, сейчас нужно искать что именно это было
посмотрел логи, теперь понятно расхождения проверяются для failsafe, а сам фильтр EKF не работает из-за платформы APM, в 3.3 включен уже принудительно
асхождения проверяются для failsafe
Стесняюсь спросить - а чем это “платформа” оценивает эти расхождения и лепит эти глитчи 😵
Впрочем я не настаиваю- умерла, так умерла. Ставьте что хотите, у меня и в нулях все в порядке.
Стесняюсь спросить - а чем это “платформа” оценивает эти расхождения 😵
Впрочем я не настаиваю- умерла, так умерла
к чему тогда такое утверждение от разработчиков всё-таки?
The EKF check runs only on the Pixhawk and only when the EKF is being used as the primary source for attitude and position estimates (i.e. AHRS_EKF_USE = 1)
EKF проверка работает только на Pixhawk и только когда EKF используется как первичный источник для определения положения в пространстве и их расчётов
что же на самом деле происходит на APM, давайте разберёмся всё-таки, а то какая-та путаница, у вас есть ваша версия?
he EKF check runs only on the Pixhawk and only when the EKF is being used as the primary source for attitude and position estimates (i.e. AHRS_EKF_USE = 1)
EKF проверка работает только на Pixhawk и только когда EKF используется как первичный источник для определения положения в пространстве и их расчётов
Уж если переводите, то надо делать это точно. Конец фразы звучит следующим образом …" только когда EKF используется , как основной источник оценки положения и позиции". Лично я не вижу здесь четкой установки, что фильтр отключен. Он не используется для управления от греха подальше, но зачем тогда в параметрах возможность отключения “мертвого” блока и регулировка его работы? Откуда в логах появляются ошибки связанные c EKF? А правку ПО могли делать не только китайцы, тот же Козин менял кое-что и по структуре, и по датчику тока. А то, что разрабы очень осторожно относятся к таким вещам следует из весьма обтекаемых оценок ими той же самой стиковой калибровки компаса, или калибровки его на природе. Мало ли кто там чего.
Уж если переводите, то надо делать это точно. Конец фразы звучит следующим образом …" только когда EKF используется , как основной источник оценки положения и позиции". Лично я не вижу здесь четкой установки, что фильтр отключен. Он не используется для управления от греха подальше, но зачем тогда в параметрах возможность отключения “мертвого” блока и регулировка его работы?
конечно, ваш перевод точнее, суть главное, что тажа
по сути игра слов, получается, что проверка используется только, когда EKF как основной источник, а когда не как основной, то не используется или используется, но проверка не осуществляется 😃
в любом случае, соглашусь, что лучше эту бороду поставить в 0, по крайней мере на платформе APM
Пробный полет с камерой на штатном подвесе.
в любом случае, соглашусь, что лучше эту бороду поставить в 0, по крайней мере на платформе APM
О! Консенсус! 😃