Walkera QR-X350 Pro

Вчера летал вечером аж до полуночи, дорвался, проверил все полетные режимы, автоматический полет по точкам. Все работает идеально. Очень удобен для FPV режим Althold, коптер очень шустро носиться по небу, и при этом высоту удерживает автоматически.
Для видеосъемки есть интересный режим Circle, при его включении коптер автоматически начинает летать идеально ровный круг вокруг снимаемого объекта носом в центр круга. Высоту при этом можно менять стиком газа.
Он летает только с родными пультами? Имеется Futaba. С ней будет биндится? Если нет. Можно поменять приемник на футабовский? Имеет это смысл?
Приветствую любителей БПЛА.
Заказал себе на днях QR350 Pro. Пока квадрик доставляется перечитал всю тему про QR350. Чем больше читал тем больше сомневался в правильном выборе. Но после создания темы QR350 Pro, былая уверенность понемногу вернулась.
Заказал себе полный комплект:
Квадролет
Камеру iLook
Стабилизатор для камеры
Пульт DEVO F7
Жду с нетерпением когда приедет. Обязательно сниму видео. Очень надеюсь что покупка себя оправдает.
Для видеосъемки есть интересный режим Circle
Я так понимаю у неПрошки такого режима нет. И не вариант его реализовать?
Он летает только с родными пультами? Имеется Futaba. С ней будет биндится? Если нет. Можно поменять приемник на футабовский? Имеет это смысл?
Прошка может летать с любой аппаратурой от шести каналов и больше. Если уже есть Футаба(кстати,какая?) имеет смысл взять комплект PNF (без передатчика и приемника) поставить внутрь приемник Футабы и летать. У футабы на данный момент ИМХО наиболее помехозащищенный протокол радиосвязи.
Я так понимаю у неПрошки такого режима нет. И не вариант его реализовать?
Нет, и реализовать на стоковой прошивке невозможно. Если только перепрошить на Megapirate, но это серьезное шаманство.
Заказал себе полный комплект:
Квадролет
Камеру iLook
Стабилизатор для камеры
Пульт DEVO F7
А батарею, зарядное устройство?
А батарею, зарядное устройство?
Конечно же и батарею 11.1V 5200mAh LIPO и зарядку и антенну.
Но присматриваюсь к более совершенному зарядному устройству - Skyrc T6200 200W 12AMP

И в планах на будущее поменять антенны на клеверы. Это если меня не устроит качество и дальность FPV
Прошка может летать с любой аппаратурой от шести каналов и больше. Если уже есть Футаба(кстати,какая?)
аппа: Futaba T8FG Super. Имеется батарея ZIPPY 30C 11.1V 5800mAh LIPO. Емкость несколько больше чем рекомендуется. Подойдет для QR-X350 Pro? Какие там размеры батарейного отсека? Какой размер между осямя двигателя по диагонали? Можно ли летать по квартире?
Какие там размеры батарейного отсека?

Остальные размеры:

Не знаю какая у тебя квартира, может метров 300кв. Но на таком коптере по квартире не полетаешь. 😃
Futaba T8FG Super
Отличная аппаратура!
батарея ZIPPY 30C 11.1V 5800mAh LIPO. Подойдет для QR-X350 Pro?
Слишком большая.
Какие там размеры батарейного отсека?
45х33х105мм
Какой размер между осямя двигателя по диагонали?
Он в названии коптера, 350мм.
Можно ли летать по квартире?
При наличии хорошего навыка, можно, если мебель и люстры не жалко. Но только в ручном режиме.
Конечно же и батарею 11.1V 5200mAh LIPO и зарядку и антенну.
Но присматриваюсь к более совершенному зарядному устройству - Skyrc T6200 200W 12AMP
А Imax 6 - это плохо? сорри за оффтоп
ИМХО весь кайф Прошки как раз в том, что начинающий юзер получает готовый и настроеный Арду с урезанным функционалом, и не тратя время на изучение, настройки, неминуемые при этом краши сразу начинает летать. Все уже собрано и настроено производителем. А уж потом, войдя во вкус начинает добавлять новые режимы, тюнинговать под себя настройки.
А пальцем в софт можно ткнуть. Полет по точкам - это софтина? Я не ошибся? Юзер грузит в аппарат точки, которые поставил на карте. Не?
А Imax 6 - это плохо?
Не в коем разе не плохо.
Просто Skyrc T6200 позволяет более гибко заряжать аккумы и следить и регулировать все параметры зарядки.
Полет по точкам - это софтина? Я не ошибся? Юзер грузит в аппарат точки, которые поставил на карте. Не?
Именно так.
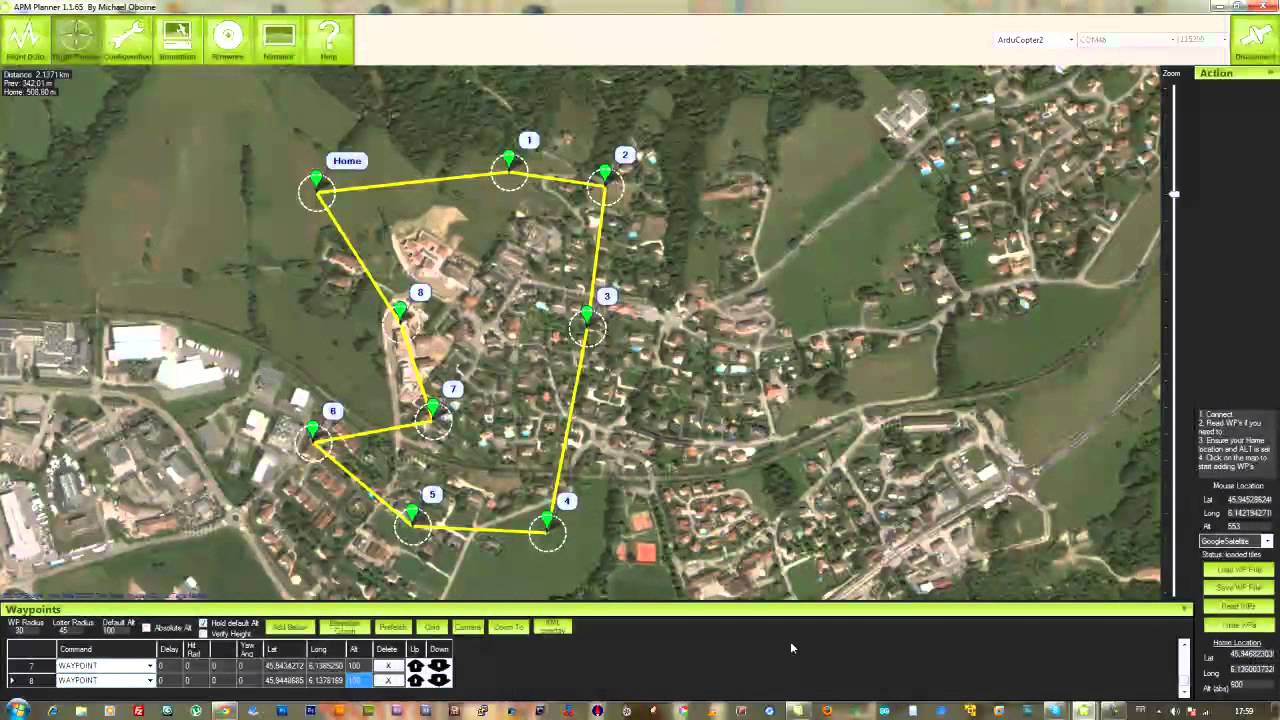
Сссылка на программу MissionPlanner в дневнике у меня.
полетал вчера в первый раз на коптере 😃
Прошка летает очень просто, особенно в среднем положении микса, как тут научил Владислав. Взлетаешь и сразу в среднее положение переключатель, потом рулишь куда хочешь а коптер держит высоту, но если надо подняться или опуститься то можно поддать газу и он нехотя поднимется.
В ручном режиме пока нелетал, надо привыкнуть.
Я так понял что для переключения режимов в этой программе (например полет вокруг точки) надо на коптер ставить модем?
Модем нужен если вы хотите ставить точки в онлайне (к примеру в полете) а миссию из точек можно и через шнурок залить дома или в поле с бука. хотя как я понял чтоб добраться до контроллера коптер разобрать треба))
Кстати с коптером идет свой пульт управления? на нем есть 3х позиционик(тумблер)?? если есть то на него выведены 3 режима полета(это с завода ) но вы к примеру можете пожертвовать одним не нужным на данный момент, и в миссион планере назначить новую команду AUTO (вот она и запустит режим полета по точкам в автоматическом режиме) или можно команду circle если хотите чтоб коптер круг нарезал вокруг точки.
Ау! Я в теме walkera qr x350 pro devo f7
Купил ! Отрабатываю взлет-посадка в микс Вверх- вниз Влево- вправо между лыжных палок) В жпс переключаю в экстренных случаях. Раз потерялось управление- заехал в ветки дерева на высоте 7м-трещинка на луче, съехал корпус )развинтил поставил на место все работает. В реж домой поднимается на10-15м вверх, а потом парит домой. Дебильные амортизаторы заменил на лыжи из утеплителя для труб, а то слетают при посадке когда прыгает!
Я только заказал этот коптер, поэтому буду задавать первый миллион тупых вопросов 😃
Вопрос первый - никто не пробовал подцепить к DEVO-M OSD? неохота таскать дополнительный датчик GPS
Ноги у него также сьемные как и у неПро? В кейс неПро влезет?. Ссылка на кейс banned link
Вопрос к тому у кого в наличии прошка.
Кейс мне кажется подойдет, на ебее я не видел кейс под прошку…А вообще знакомый взял аллюм кейс в хозмаге Метро положил туда паралон и все супер.Я считаю нормальный кейс -это когда ноги открутил и положил с пропами вместе причем не вынимая проводов, а вообще кейс тяжеловат. Лыжи из утеплителя наверно обматаю их изолентой, чтоб грязи меньше было. Кстати резиновые штатные весят 36гр а эти 4гр…
Зимой воще клево! Как валенки😁
Аля ФАНТОМ в валенках)
Я так понял что для переключения режимов в этой программе (например полет вокруг точки) надо на коптер ставить модем?
На 5 канале шесть зон по частоте ШИМ, на каждую из них можно назначить полетный режим, плюс еще на 7 и 8 канале по одному режиму повесить. По умолчанию в Прошке на 5 канале три режима, Stabilize Mide, Loiter Mode и RTL. На 7 канале назначен Simple Mode. Любой из них можно переназначить в Missionplanner. Завтра доберусь до компа, сделаю в дневнике шпаргалку с картинками.
как я понял чтоб добраться до контроллера коптер разобрать треба))
В Прошке выведен на корпус разъем микроюсб, разбирать корпус и лезть внутрь не надо, подцепил шнурок и залил миссию.
[IMG]s6.hostingkartinok.com/uploads/images/2014/04/2db7406ddd807980aad64830db335732.jpg[/IMG]

Завтра доберусь до компа, сделаю в дневнике шпаргалку с картинками.
Ждем с нетерпением, у меня как раз через пару дней доступ к Прошке появится, так что проверим как это все работает. Пока что скачал и установил Mission Planner, не сказал бы что в нем все так же легко и понятно как в Ассистенте для NAZA. Так что Ваши шпаргалки, будут очень даже кстати.