Walkera QR-X350 Pro

Ну всё, я в теме. Доставили вчера квадр. Оперативно работают на миракле. 24 апреля заказал, заказал обычной почтой-отправили EMS, вчера уже доставили.
Всё вроде собрал, подключил. Не могу разобраться, как подвес включить? Подключаю по видео и картинке, а при включении квадра - подвес начинает дергаться. Подергается, подергается и перестанет. Через некоторое время тоже самое. Может что-то нужно и в пульте настроить? Я думал, что RTF он уже идет настроенный.
И ещё вопрос, как крепить антенны, которые по бокам у ног идут?
rx703
а как подключены с трансмитера к подвесу аух 4 и аух5 --пит и ролл ? и что в настройках output devices?
Ну всё, я в теме. Доставили вчера квадр. Оперативно работают на миракле. 24 апреля заказал, заказал обычной почтой-отправили EMS, вчера уже доставили.
Всё вроде собрал, подключил. Не могу разобраться, как подвес включить? Подключаю по видео и картинке, а при включении квадра - подвес начинает дергаться. Подергается, подергается и перестанет. Через некоторое время тоже самое. Может что-то нужно и в пульте настроить? Я думал, что RTF он уже идет настроенный.И ещё вопрос, как крепить антенны, которые по бокам у ног идут?
привет поздравляю с покупкой) я антеннки пустил в доль ног а кончики завел в отверстия и с обратной стороны прижал скотчем.
а как подключены с трансмитера к подвесу аух 4 и аух5 --пит и ролл ? и что в настройках output devices?
Да всё как в инструкции. Перепробовал все варианты, включая метод научного тыка. Максимум чего добился, это вернулся к заводским настройкам, где всё работает, но не даёт нужного угла. Поэтому взял в руки напильник. Теперь всё устраивает.
аух 4 и аух5 так и есть пит и ролл
GEAR- MIX SW
FLAP- AUX2 KB
AUX2-FMOD SW
Всё в активе.
Для равновесия подвеса с родной камерой пришлось почти 20гр свинца приклеить на противоположный мотор.
cloud.mail.ru/public/f0de5d0f32fd/IMG_0053.JPG
cloud.mail.ru/public/947b3b9c19d0/IMG_0052.JPG
Для равновесия подвеса с родной камерой пришлось почти 20гр свинца приклеить на противоположный мотор.
Да, к сожалению, с балансировкой на этом подвесе все очень плохо, даже с ГоПро 3.
Да, к сожалению, с балансировкой на этом подвесе все очень плохо, даже с ГоПро 3.
и правда что есть то есть(( всетаки за такие деньги могли бы делать и качественее. но увы етаж китайцы.
Подергается, подергается и перестанет. Через некоторое время тоже самое.
Та же фигня и у меня была. Но пока не приедет новый коптер не могу проверить.
И ещё вопрос, как крепить антенны, которые по бокам у ног идут?
Я малярным скотчом перетянул.
Для равновесия подвеса с родной камерой пришлось почти 20гр свинца приклеить на противоположный мотор.
cloud.mail.ru/public/f0de5d0f32fd/IMG_0053.JPG
cloud.mail.ru/public/947b3b9c19d0/IMG_0052.JPG
слишком грубо есть же грузики для балансировки дисков))) самоклеющиеся!
А в каком меню такая дивная настройка?
Летанул сегодня по 5 точкам -супер…запустил- закурил- пора камеру ставить!
Кто разбирал нп Прошке контроллер полетный, есть ли там разъем для подключения 3DRadio modem?
может есть фотки платы контроллера?
Прикольный с виду) да еще и ноги раздвижные
Кому чего))) в этой жизни важнее)) Мож ты не на тот форум задрался?
Кто разбирал нп Прошке контроллер полетный, есть ли там разъем для подключения 3DRadio modem?
может есть фотки платы контроллера?
почитай страницы две назад! там есть и про 3 д видео)
[QUOTE=
почитай страницы две назад! там есть и про 3 д видео)[/QUOTE]
спасибо, все страницы прочел кроме предпоследней 😉
To NARAJANA
Владислав, как успехи с Ардукоптером, или Прошка полностью его заменяет?
Мне удалось свой закончить, получился солидный аппарат на 1кг, и размером 500мм. На праздниках первую мисию отлетал, прошло без проблем.
Ты извини конечно я ссылку давал на 5 стр-
www.microsofttranslator.com/bv.aspx?from=&to=ru&a=…
если устраивает добавь - спасибочку)
Для равновесия подвеса с родной камерой пришлось почти 20гр свинца приклеить на противоположный мотор.
cloud.mail.ru/public/f0de5d0f32fd/IMG_0053.JPG
cloud.mail.ru/public/947b3b9c19d0/IMG_0052.JPG
Зачем? Там две крутилки в мозгах. Одна регулирует горизонталь, вторая вертикаль. Всё прекрасно выставляется.
другое дело, что вниз угла не хватает, для чего и пилил, а по плечам хода вполне достаточно. И ещё, штатная камера разочаовывает. Позиционируют , что HD, а чёткий только центр, углы смазывает, засвечивает и резкость не та. Вообщем, не блеск, так поучиться снимать. Может глазок сам заменить? Например на соньку. Стекло защитное- пластик, не улучшает изображение.
www.youtube.com/watch?v=YtWb6gblXYg
Зачем? Там две крутилки в мозгах. Одна регулирует горизонталь, вторая вертикаль. Всё прекрасно выставляется.
Камера в подвесе должна быть сбалансированна механически! А потом уже подключаются мозги подвеса.
Камера в подвесе должна быть сбалансированна механически! А потом уже подключаются мозги подвеса.
А смысл? После подключения питания она прекрасно выравнивается приводом из любого положения и без дрожи отыгрывает любые наклоны. Другое дело , если его нагрузить под предел, то тогда без балансировки не обойтись, а с весом этой камеры он легко справляется, а лишний вес- минус время. Я не думаю, что привод подвеса затратит больше тока на выравнивание погрешности перекоса, чем на подъём лишнего балансира. Камера тяжеловата с передатчиком, аллюминиевый теплоотвод тяжёлый, видимо подвес делался под проху, а она намного легче.
всем привет братцы) вот есть соображение по поводу настройки фейл сейв если наша про350 обзавелась копией мозгов ардупилота то я так понимаю настройка уже неограничивается самой аппаратурой в работу вкл и сам софт мозгов) (через тот же мисион планер. так вот меня терзают смутные сомнения что режим RTL (
атоматический возврат квадрокоптера домой.) напрямую связан с настройкой файл саве на аппе по умолчанию так и есть из коробки устан. холд. а когда заходишь в софт видишь совсем другую картину (показание того же rtl)
конечьно мое предположение может быть ложным
но мое мнение с етим режимом надо разбиратся а то у многих про улетает в китай при активации го ту хоум.
я один раз опробовал гоу хоме он вернулся .но больше чето нехочу нет уверенности что сново все сработает.сажаю пока либо в мануале либо в жпс.
мое мнение с етим режимом надо разбиратся а то у многих про улетает в китай при активации го ту хоум.
Валкера Про может улететь, если произойдет глюк ЖПС. В Ардупилоте есть настройка защиты, при глюке ЖПС или пропадании сигналов спутников, или забросе трека, можно настроить или автопосадку, или переход в удержание высоты. Ребята из Валкеры решили эту настройку отключить. Так что, меняем в настройке FS_GPS_ENABLE , Disabled на Land и вместо улета, будет автопосадка.

на аппе по умолчанию так и есть из коробки устан. холд. а когда заходишь в софт видишь совсем другую картину (показание того же rtl)
В Валкере Про настроен( или не настроен) аппаратный файлсейв средствами приемника радиоаппаратуры. Но в самом Ардупилоте есть и настройка программного файлсейва. Надо использовать только один из них.
вы прям как в корень смотрели как раз именно етот параметр смотрел в мисион планер при подключенной про. и он был выкл. я еще подумал как же так ведь в описании потеря гпрс а он отключен.
китайцы схитрили )) спосибо еще раз за разьеснения. терь понятно если файл саве настроен в софте самой вальки то аппа уже неучавствует либо наоборот
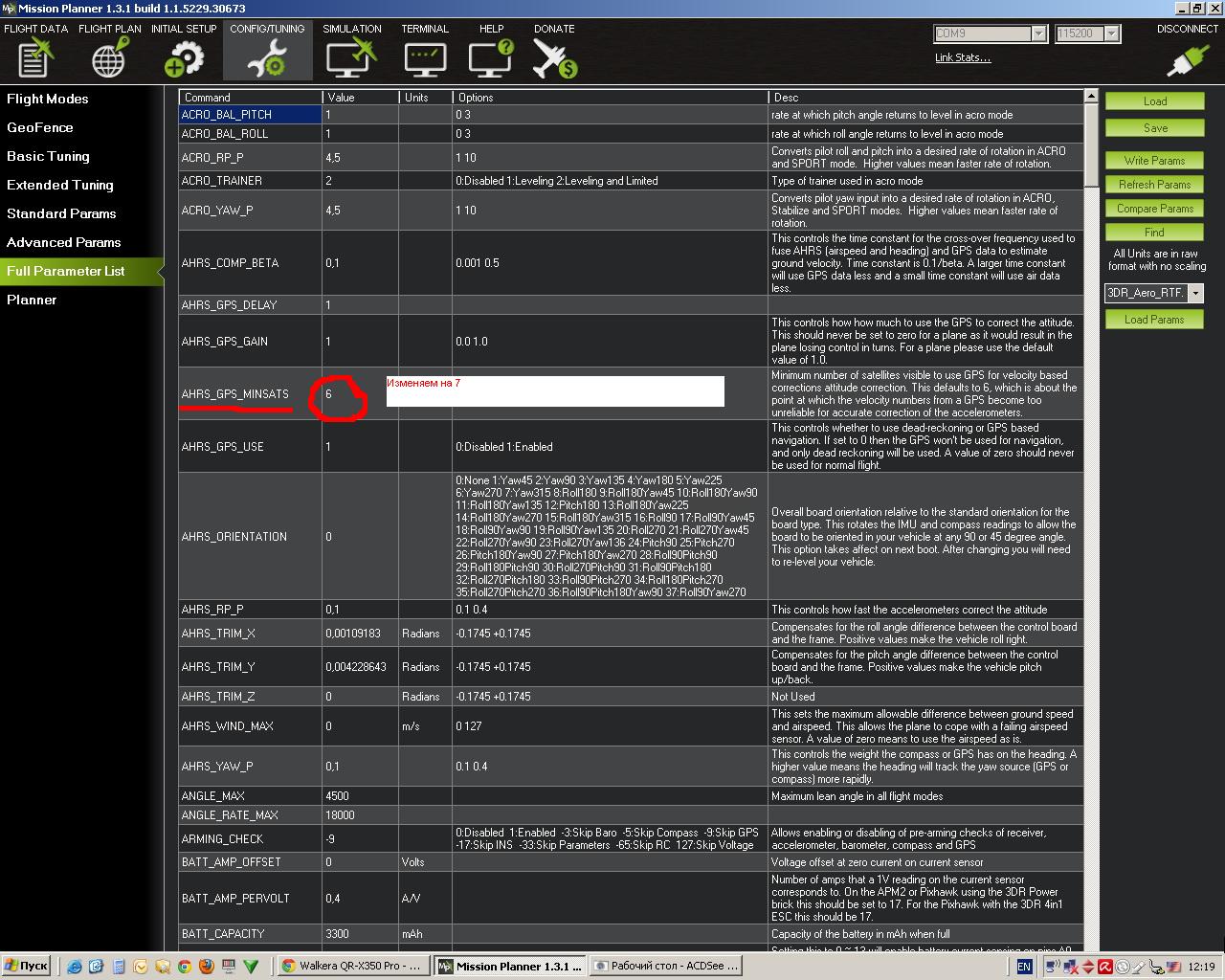
Сравнил полный лист параметров, после перепрошивки Валкеровской 1.1.
Изменилась всего одна настройка, AHRS_GPS_MINSATS. Было значение 6, стало 7.
Смысл этого параметра в следующем. Автопилот использует скорость GPS для коррекции акселерометра. При малом количестве спутников, точность определения скорости по GPS падает, начинают происходить забросы трека, и чтобы исключить рывки коптера, введен параметр минимального количества спутников, при котором коррекция активна. То бишь, после перепрошивки коррекция будет отключаться, если спутников меньше семи. А раньше отключалась, если меньше шести.
Параметр можно просто поправить в МиссионПланнере и не заморачиваться перепрошивкой через кривой софт от Валкеры, который ещё и драйвер подменяет.
А подключать коптер к компу нужно во включенном состоянии? И что ещё нужно? Поставить МиссионПланнер на комп, подключить коптер и запустить программу?
А подключать коптер к компу нужно во включенном состоянии? И что ещё нужно? Поставить МиссионПланнер на комп, подключить коптер и запустить программу?
необезательно батарейку подключать .
кстати ребята вот сылочька случайно нашел как подключать гопро камеру совместно с передатчиком boscom www.helipal.com/product_info.php?currency=HKD&prod… (не реклама)