Walkera QR-X350 Pro

Сможешь, если не рвалась связь с пультом. Если рвалась - может и не среагировать.
Я ещё автомисииями не балавался, поэтому заранее спрашиваю ньюансы. Т.е. после выполнении автомисии логично было бы зайти снова в МП и стереть план предыдущей автомисии, надеюсь это можно будет сделать.
Я ещё автомисииями не балавался, поэтому заранее спрашиваю ньюансы. Т.е. после выполнении автомисии логично было бы зайти снова в МП и стереть план предыдущей автомисии, надеюсь это можно будет сделать.
Там главный ньюанс - что запрограммировано при пропаже сигнала от пульта. Если RTL - вернётся и прервёт автомиссию. Если вместо RTL поставить “авто” - будет продолжать миссию. Это и правильно и рискованно. Если миссия окажется не от этой территории - улетит… и последним шансом на спасение будет виртуальный забор. Забор, кстати лучше всё время включать - вещь очень полезная.
Что-то почта тормозит - уже не терпится проверить двухсистемный GPS-модуль U-blox 7M
У них там на почте, то ли рамазан, или рамадан, или до них наконец допёрло что выгоднее посылки у людей тырить, а не доставлять как положено…
У кого iLOOK всегда прикручивайте антенну ключом! Болтающаяся антенна вызывает повышенный расход батареи, уменьшение дальности, повышенный перегрев передатчика. СВЧ вещь коварная.
Там главный ньюанс - что запрограммировано при пропаже сигнала от пульта. Если RTL - вернётся и прервёт автомиссию. Если вместо RTL поставить “авто” - будет продолжать миссию. Это и правильно и рискованно. Если миссия окажется не от этой территории - улетит… и последним шансом на спасение будет виртуальный забор. Забор, кстати лучше всё время включать - вещь очень полезная.
Вопрос 1: а каким параметром программируется fail safe при пропаже сигнала от пульта? В МП вроде как можно запрограммировать только FS по потере GPS.
Вопрос 2: при автомисии потеря связи с пультом и так обеспечена, так что не совсем понятна связь автомисии и FS по потери связи с пультом.
Вопрос 1: а каким параметром программируется fail safe при пропаже сигнала от пульта? В МП вроде как можно запрограммировать только FS по потере GPS.
Вопрос 2: при автомисии потеря связи с пультом и так обеспечена, так что не совсем понятна связь автомисии и FS по потери связи с пультом.
Самое основное: FLTMODE4,5 и FLTMODE6,3
Конечно, логика подсказывает, что нужно настроить: FS_THR_ENABLE,2
Но Прошка кладёт на эту настройку без верхней.
С такими настройками, двухпозиционный переключатель у меня сперва включает Лоитер, а затем “АВТО” - хотя у тотального большинства там вместо “авто” установлен “RTL”.
Если не поменять местами RTL и АВТО - Прошка всё равно будет возвращаться при потере сигнала, хотя ей напрямик указано - продолжать миссию. Такая вот тонкость…
Самое основное: FLTMODE4,5 и FLTMODE6,3
Конечно, логика подсказывает, что нужно настроить: FS_THR_ENABLE,2
Но Прошка кладёт на эту настройку без верхней.С такими настройками, двухпозиционный переключатель у меня сперва включает Лоитер, а затем “АВТО” - хотя у тотального большинства там вместо “авто” установлен “RTL”.
Если не поменять местами RTL и АВТО - Прошка всё равно будет возвращаться при потере сигнала, хотя ей напрямик указано - продолжать миссию. Такая вот тонкость…
у меня вообще все совсем по другому. FLTMODE4 - 13, FLTMODE6 - 6. Получается если двухпозыционник включен на 0, то фмод 0 - stabilize, 1- althold, 2 - loiter, если на 1 то 0 - drift, 1 - sport (видимо тут будет авто когда до планирования миссии доберусь) и 2 - rtl. Обязательно делать как у вас или всеже ничего что мне так удобней и миссия будет работать норм при потере пульта?
у меня вообще все совсем по другому. FLTMODE4 - 13, FLTMODE6 - 6. Получается если двухпозыционник включен на 0, то фмод 0 - stabilize, 1- althold, 2 - loiter, если на 1 то 0 - drift, 1 - sport (видимо тут будет авто когда до планирования миссии доберусь) и 2 - rtl. Обязательно делать как у вас или всеже ничего что мне так удобней и миссия будет работать норм при потере пульта?
Есть только один способ узнать это - проверить на практике…
так и думал когда писал мессагу, но всеже стало интересно, может есть какая-то “чудоформула”)
поменял RTL_ALT_FINAL в 0, отлетал, пошел по FS_BATT на Land = 1-1.5м лок моторв и бубух на травку, причем без реакции на правый стик. Появляются мысли, может то 10.4В порог замаленький всетаки у меня? т.е. срабатывает фс, он пытается сесть но акумов не хватает и какаято часть электроники “отваливается” из-за низкого напряжения… или может как-то откалибровать барометр нужно?
хотелось бы дабы малыш садился тихо, мирно и без последствий (мог же и на асфальт как-то хлопнутся)
есть идеи? буду благодарен. (могу и свои настройки залить, если есть у кого желание посмотреть)
10,4 крайне низкий порог. Уже может быть отсечка регулей без участия контроллера.
пошел по FS_BATT
Отключите это вообще. Поставьте пищалку, 3DR radio, OSD…
Даже с отключенным упадет, когда регули остановят моторы. Ниже 10,7 В уже идет довольно быстрое падение напряжения батареи.
Даже с отключенным упадет, когда регули остановят моторы. Ниже 10,7 В уже идет довольно быстрое падение напряжения батареи.
Всё верно! Я же говорю: OSD, 3dr, пищалка. Предел выбирать по своему разумению. Валить только на себя, а не на технику. Я вообще, если далеко, рассчитываю на 11,1V.
Ниже 10,7 В уже идет довольно быстрое падение напряжения батареи.
какбы по этому поводу и задумался. ясен пень что не тестировал в дом уловиях. спасибо! попробую на 10.7 как поведет себя, т.к. под конец полетов держу коптер рядом и на высоте 5-10м.
Отключите это вообще. Поставьте пищалку, 3DR radio, OSD…
жду осд пока приедут вместе с очками. а пока летательные тренировки и разбор МП настроек.
Я вообще, если далеко, рассчитываю на 11,1V.
тут такое дело, все зависит от качества самих аккумуляторов. он может и на 3.5В отдавать максимум энергии,а может и на 3.2В (я так, к примеру). Как понимаю нужно раз оттестить чо дай как,а потом летать спокойно. Интересно такие же целлы стоят в тех акумах с дилэкстрима как “оригинальные” или всетаки там китайцы постарались чота намудрить “новенького”) - приедут, посмотрим. тогды уже точно буду тестить.
Валить только на себя, а не на технику
если вы обо мне - никапельки не валил на технику, к каждой технике (особенно китайской) нужно иметь свой подход и точно знать на что она способна, рас уж решил выюзать её на максимум.
поменял RTL_ALT_FINAL в 0, отлетал, пошел по FS_BATT на Land = 1-1.5м лок моторв и бубух на травку, причем без реакции на правый стик. Появляются мысли, может то 10.4В порог замаленький всетаки у меня? т.е. срабатывает фс, он пытается сесть но акумов не хватает и какаято часть электроники “отваливается” из-за низкого напряжения… или может как-то откалибровать барометр нужно?
хотелось бы дабы малыш садился тихо, мирно и без последствий (мог же и на асфальт как-то хлопнутся)
есть идеи? буду благодарен. (могу и свои настройки залить, если есть у кого желание посмотреть)
Что у первой Вальки, что у ПРО, проблемы с FS по вольтажу. И вполне может быть, что проблема в ESC. На других контроллерах и 9.6в, не вырубит.
Грохнулась всё же вчера моя “валька” 😦 Метров с трёх наверное… Сам наверное виноват. Не резетнул её после калибровки компаса. Расскажу всё по порядку, вполне возможно, что и не из за этого,- коллективный мозг подскажет. погодка вчера была хорошая, приехал друг ко мне видит это чудо у меня на шкафе, спрашивает, что да как, ну я говорю пойдём увидишь сам. Выходим в поле, я делаю стандартную процедуру калибровки ( всё как обычно) GPS моргает 4 раза…гуд. А ещё забыл включить айлук на запись. Поднимаюсь метров на 10, включаю режим зависания и вижу как то сильно её колбасит, раскачивает, высоту меняем плюс-минус метр-два. Ну думаю, ладно полетаю…полетал, туда -сюда, вверх забрался метров на 50 наверное, а может и выше, ставлю тумблер “домой” и смотрю как то быстро он снижаться начал, но в конце притормозил и я от греха подальше последние полметра сажал в мануале. Подумал, что наверное наверху, над деревьями ветер сильный и решил втрой полёт сделать ниже. Стратанул также и метрах пяти над землёй включил зависание. Смотрю его так же колбасит, поднял чуть выше, покрутил и думаю, что нет, нужно сажать, включаю домой и тут происходит странное, он опускается примерно ан три метра над землёй и моторы начинают как бы выключаться на долисекнды и я туго начинаю догонять, что валька думает, что она села и тут в этот момент моторы выключаются и она грохается на землю. Итог: одна резнка подвеса порвалась, две соскочили, на луче трещина между двух половинок корпуса с деформацией ( на место не поставить 😦 ) В каких то местах корпус тоже немного разошёлся, но легко встал на место на защёлки ( наверное), Проп один загнуло. Собственно вопрос: Что это было? А! Ничего абсолютно не менял в настройках. Всё в стоке.
Грохнулась всё же вчера моя “валька” 😦 Метров с трёх наверное… Сам наверное виноват. Итог: одна резнка подвеса порвалась, две соскочили, на луче трещина между двух половинок корпуса с деформацией ( на место не поставить 😦 ) В каких то местах корпус тоже немного разошёлся, но легко встал на место на защёлки ( наверное), Проп один загнуло. Собственно вопрос: Что это было? А! Ничего абсолютно не менял в настройках. Всё в стоке.
Что то много повреждений для падения с трех метров. Корпус надо разобрать, а потом на место все ставить и клеить . Страшного ничего если контроллеры моторов исправны. У меня с 10м камнем и ничего! Надо было сажать сразу и переколибровывать.А что касается камеры- в Новгороде получил разрешение на сьёмки Кремля, отлетал и с высоты и все храмы облетел и стены… народу собралось вокруг куча и с телевидения) я им показывал на мониторе все… уехал а потом бац -камера была не включена!!!
Что то много повреждений для падения с трех метров. Корпус надо разобрать, а потом на место все ставить и клеить . Страшного ничего если контроллеры моторов исправны.
Думаю, что грохнулась на луч, из за этого и срезало резинку. Клеить там нечего , так как трещин то по факту нет, есть деформация и именно из за это образовалась щель между двумя полукорпусами. вчера же всё и собрал, проверил в мануале во дворе, не много тянет назад, но я думаю, что это из гнутого пропа. Руками то я на место его поставил, но деформация на лицо.
Три вечера сборки-настройки ,и вот наконец вчера выехал в поле. Сам я “самолетчик” ,до этого ни с вертолетами ни с квадриками не сталкивался ,если не считать мою самую бестолковую покупку -parrot ardrone2. На удивление управление прошкой не вызвало у меня вообще никаких затруднений ,хоть и передатчик скорее в самолетной ,первой моде.Прошка оказалась очень простой и приятной в управлении . Выкатал за первый выезд четыре аккумулятора. Летал и с подвесом (довольно тяжелым с бангуда) и без ,проверил все основные режимы. В удержании висит как “прибитая”. В авто возврате приземляется с точностью 30-40см от места взлета.Четко срабатывает виртуальный экран. Подвес и телеметрия(minim OSD) работают отлично.Прошивка у меня 1,1 пробовал сделать даунгрэйд на 1,0 ,средствами валкеровской утилиты- не получилось. А потом оказалось и не надо. Думал что в 1,1 не смогу менять параметры настройки в миссион планере.А все меняется и записывается .В настройках ориентировался в основном на сообщения с личным опытом “Tera” и “NARAJANA”. Отстроил свой передатчик на сигнализацию при просадке бортового акка до 10,9v. Проверил “повесив” прошку перед носом . Мигать левый светодиод начал когда напряжение было 10,6v. Так что запас вернуться у меня есть. Присматриваясь к покупке сомневался ,читая в этой ветке негативные ситуации .Но после вчерашнего облёта убедился ,что для своих задач и по своей цене -прошка просто отличная покупка. Еще раз спасибо вам всем ,коллеги, кто создал и пополняет своими сообщениями эту тему.Благодаря этому топику ,в моем “ангаре” прибавился еще один интересный аппарат.😃
Вот она, радио пищалка 430 мГц
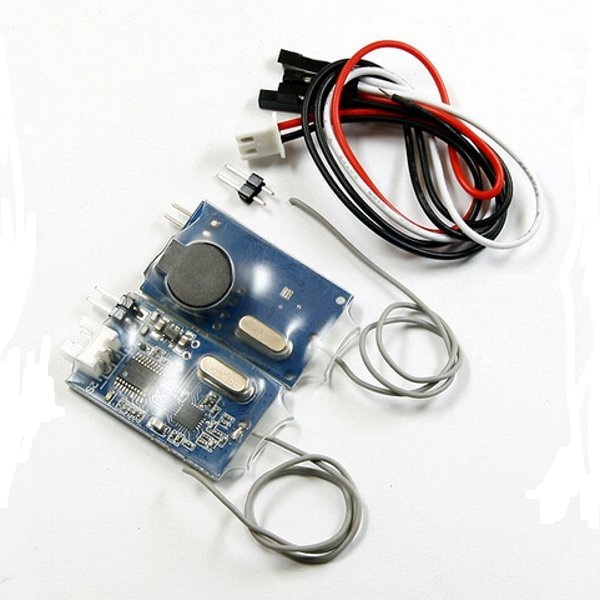
Есть в наличии и цена адекватная…
Вот она, радио пищалка 430 мГц
Вам пора дневник писать! Или в Вики наполнять активнее 😃
Тут еще дешевле…
aliexpress.com/…/wholesale-Wireless-Voltage-Alarm.… (не реклама)
Правда описание страдает 😉
Это что за размер 10Х10 см? и вес 100 грамм ??? это только на 747 боинг вешать!!
Понеслось…
Заголовки буржуазной прессы:
В США расследуют использование беспилотника для съемки свадьбы конгрессмена и его партнера
Американцу, который снял потрясающее ВИДЕО фейерверка “изнутри”, объяснили: это незаконно и опасно
Белорусские военные через газету ищут потерянный беспилотник, оцененный прессой в миллионы долларов
В Ирландии дрон с наркотиками потерпел крушение на тюремном дворе и вызвал ажиотаж среди заключенных
Жительница Сиэтла засекла беспилотник, следивший за ней через окно
Очередное достижение квадрокоптера: летающий дрон пролетел над самым высоким зданием мира
😃
По-поводу последнего “достижения” - там высота всего-то 800 метров. Летали и вдвое повыше !
Это что за размер 10Х10 см? и вес 100 грамм ??? это только на 747 боинг вешать!!
Я себе поставил 16 гр с проводом все банки показывает!И стробоскоп снизу, как на самолете, уже писал. Но самая хорошая пищалка-osd конечно).Да! все прибавляет полетный вес: osd ,камера, стробоскоп, треккер, 3драдио,резиновые копыта и т.п.
Понеслось…
Заголовки буржуазной прессы:
В США расследуют использование беспилотника для съемки свадьбы конгрессмена и его партнераОчередное достижение квадрокоптера: летающий дрон пролетел над самым высоким зданием мира
По-поводу последнего “достижения” - там высота всего-то 800 метров. Летали и вдвое повыше !
Следующее сообщение: Покорена непокоренная вершина Тибета квадролетом Валкера qr350 pro! А может это будет Останкинская телевышка, тогда нам все пипец! Алексей! Не пора бы в мануал написать раздельчик по миссиям и видео на 2км туда закинуть? А вообще прогресс сложно остановить.