Прошивки CleanFlight/BetaFlight для полетников

Все верно, но можно и без закорачивания контактов.
Вообще на CC3D у кого-нибудь конфигурирование регуляторов через cf/bf проходит? Просто на предыдущих регулях клонах EMAX12A у меня через cf/bf тоже сконфигурить не получалось.
На таких взлететь у меня получится на назе32 10dof?

Все верно, но можно и без закорачивания контактов.
А как тогда залить загрузчик Cleanflight ?
чтобы контроллер без подачи питания от бека к USB подключать ?
без ftdi никак ?
просто как я понял если прошить betaflight_CC3D.bin с помощью OpenPilot GCS то загрузчик останется OpenPilot ?
На таких взлететь у меня получится на назе32 10dof?
Так вроде ж дефолтные пиды. Взлетит! Как летать будет это вопрос второй.
А как тогда залить загрузчик Cleanflight ?
Он и так зальется, не бойтесь =) FTDI нужен. Просто через USB работает VCP - виртуальный порт. Проц должен быть загружен, чтобы он работал. Следовательно прошивку залить в него не получится. FTDI нужен. Можно использовать Arduino Nano или UNO. Именно. BIN = OPBL.
з.ы.
Какой уже раз… Какой уже раз…
То есть, заливать из конфигуратора через ftdi?
Да.
в итоге: армлю коптер трёхпозоционником включаю bb вторым трёхпозоционником вожу стиками, жду секнд 5 дизармлю коптер отрубаю батарею, подрубаю к компу - во вкладке dataflash пусто (2 MB своюодного места), кнопки Save и Erase серые…
Дошел тоже до этого. Для записи на внутреннюю память надо сделать
set blackbox_device = 1
*пробежался по теме и увидел, что уже отвечали*
—
Сидел почти 1.5 месяца теоретиком, теперь вроде коптер пересобрал.
С pid_at_min_throttle я так понял проблему решили. Задаем 2-3 секунды и коптер в течение этого времени стабилизируется, даже если газ в 0.
В свете этого есть ли смысл давать микс на газ, чтобы двигатели всегда крутились? В OpenPilot был параметр минимального газа. Насколько я понял, если коптер хотел крутить двигатель, то он обязательно подавал газ не ниже этого порога. У меня двигатели крутились где-то с 1060мс, но коптер падал периодически после роллов/флипов. Когда увеличил где-то на 20мс коптер больше не падал. В cf/bf алгоритм походу чуть другой.
Тут у людей с FS проблемы были на CC3D: падал коптер ни с того ни с сего. Эта проблема пофикшена? Или может команды:
failsafe_delay, failsafe_off_delay, failsafe_throttle как раз предназначены для того, чтобы коптер не отрубался при малейшей потере сигнала?
Прочитал тему и не нашел ответа на свой вопрос, подскажите, пожалуйста.
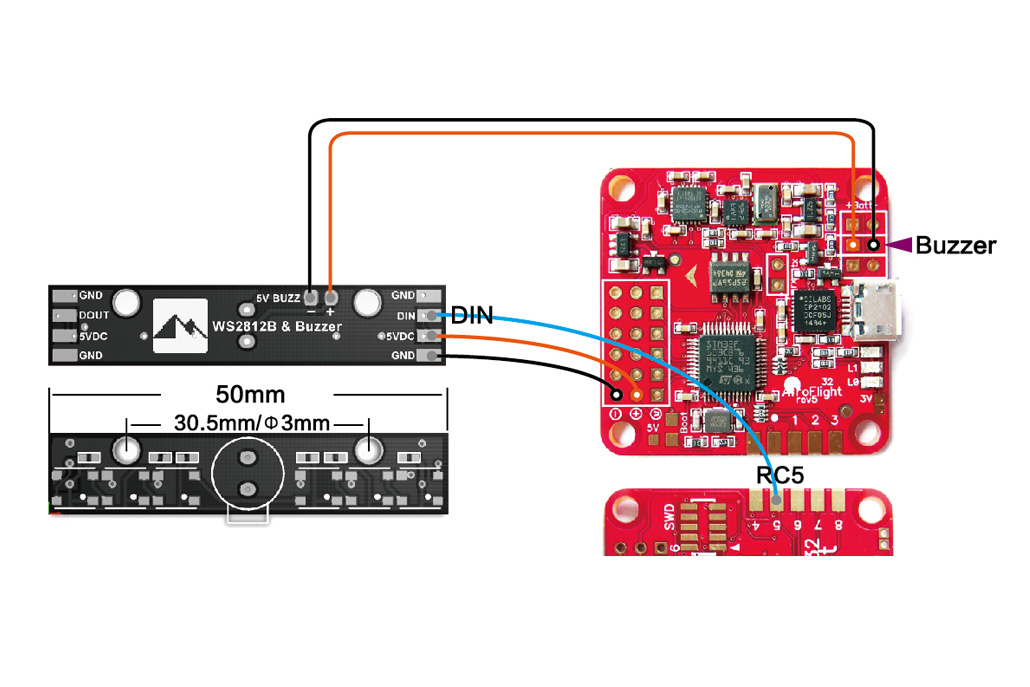
Имеется наза32 (вер.6) + приемник D4R-II подключенный к назе по PPM. Вопрос следующий - как подключить к назе вот эту пищалку fpvmodel.com/matek-3-in-1-battery-monitor-discover… , чтобы она включалась с тумблера?
- Там где двойная фишка + и - взял с акка
- Там где тройная + и - взял с 5в от видеопередатчика fx795t, а сигнальный с пина назы + VBat
- в CleanFlight (прошивка последняя от Бориса) выставил включения Buzzer’a с тумблера.
Проблема в том, что пищалка не работает! Наза на тумблер реагирует (тумблер включаешь - наза начинает моргать диодами), а пищалка молчит! Такое ощущение, как будто сигнальный провод не подключен.
На втором коптере тоже CF c прошивкой от Борис, наза32 (вер.6) и D4R-II по РРМ. Разница только в том, что на этом коптере к назе подключена обычная пищалка. Подключена к + и - пинам на разъеме VBat. С тумблера все работает.
Может я что-то не так делаю?
закоротив контакты на плате.
Я прошился не коротя контакты
Так вроде ж дефолтные пиды. Взлетит!
Очень дёргается, не стал взлетать выше полуметра. Надо просто Р уменьшить или пид контроллер сменить на другой?
Очень дёргается, не стал взлетать выше полуметра
“Дергаться” можно по-разному. Если это осцилляции, то в зависимости от их частоты нужно грешить или на P, или на I составляющую. Попробуйте P понизить раза в два и посмотреть на поведение. А вообще в BF есть GTUNE, на CC3D правда пляски нужны, чтобы прошивку с поддержкой этой фичи получить.
Проблема в том, что пищалка не работает!
Насколько я понимаю, все пищалки с Y-кабелем начинают работать сами по прошествии некоторого времени, если сигнал в канале не меняется. Причем сигнал должен быть обычным PWM, с oneshot не прокатит.
Если PIDы не правильные, то смена пидконтроллера не поможет. Хорошо летают что 1й, что 2й. Да и харакири хорошо летает, только непопулярен.
Насколько я понимаю, все пищалки с Y-кабелем начинают работать сами по прошествии некоторого времени, если сигнал в канале не меняется. Причем сигнал должен быть обычным PWM, с oneshot не прокатит.
Если PIDы не правильные, то смена пидконтроллера не поможет. Хорошо летают что 1й, что 2й. Да и харакири хорошо летает, только непопулярен.
Не совсем понял, что ты имел в виду.
Харакири имеет смысл) но это точно не для новичка - флипы идут в 3-4 раза быстрее, чем на 0м контроллере.
вот мой пример (сорри за качество видео)
Это не просто пищалка. Это мониторинг разряда батареи и + поисковое устройство.
Пищать она начинает, если просел акк, или же если на вход не подаётся PPM сигнал, который тройником берётся с одного из каналов. например с газа.
Для того чтобы на назе пищалка работала с тумблера, надо подключить пищалку с генератором, прямо к контактам buzzer
Это не просто пищалка. Это мониторинг разряда батареи и + поисковое устройство.
Пищать она начинает, если просел акк, или же если на вход не подаётся PPM сигнал, который тройником берётся с одного из каналов. например с газа.Для того чтобы на назе пищалка работала с тумблера, надо подключить пищалку с генератором, прямо к контактам buzzer
На этой пищалке 3 контакта: +, -, сигнальный.
На назе 2 контакта под buzzer: + и -.
Если подключать + к +, - к -, то не работает. Если подключить +к+, -к сигнальному, то опять же не работает.
Откуда можно взять с назы сигнальный провод, если приемник подключен по ррм?
На назе 2 контакта под buzzer: + и -.
Для понимания видео, владеть английским не обязательно.
На этой пищалке 3 контакта: +, -, сигнальный. На назе 2 контакта под buzzer: + и -. Если подключать + к +, - к -, то не работает. Если подключить +к+, -к сигнальному, то опять же не работает.
На этой пищалке якобы есть три режима писка. Второй (F2) типа можно включить писк с тумблера. Третий (F3) включится сам, когда не будет изменения сигнала в канале в течение одной минуты. Эти режимы противоречат друг другу в определенной степени.
Напрямую вашу пищалку подключить у контактам буззера на Назе32 нельзя. Это же логично и элементарно. К Назе32 подключается неумный буззер без платы. Если вы из своей платы выпаяете пищалку, вот тогда сможете подключить буззер напрямую к Назе32.
Если вы из своей платы выпаяете пищалку, вот тогда сможете подключить буззер напрямую к Назе32.
И то не факт!
В этой пищалке может не быть генератора!
Это да. Забыл этот нюанс.
Подскажите, есть контроллер dodo и naze32. И там и там стоит betaflight последний.
Вроде как видел, что на dodo можно looptime поставить меньше 1000.
Смотрю в dump нету там looptime, делаю set looptime=1000 говорит нет такой переменной.
В конфигураторе, на вкладке Configuration есть looptime, изменяю, жму save, контроллер перезагружается стоит старое значение.
Что я делаю не так? )
ЗЫ. Пид контроллер 2
Больше не нужен этот параметр. Теперь цикл синхронизируется с чем-то там и составляет порядка 1000. Смотрите в конфигураторе внизу в строке пишет текущий луптайм.
Спасибо.
Наверно с гироскопом синхронизируется.
А что нибудь слышно про разгон i2c шины по которой гироскоп подключен? Где то встречал про это, сейчас найти не могу.