Прошивки CleanFlight/BetaFlight для полетников

Да.
в итоге: армлю коптер трёхпозоционником включаю bb вторым трёхпозоционником вожу стиками, жду секнд 5 дизармлю коптер отрубаю батарею, подрубаю к компу - во вкладке dataflash пусто (2 MB своюодного места), кнопки Save и Erase серые…
Дошел тоже до этого. Для записи на внутреннюю память надо сделать
set blackbox_device = 1
*пробежался по теме и увидел, что уже отвечали*
—
Сидел почти 1.5 месяца теоретиком, теперь вроде коптер пересобрал.
С pid_at_min_throttle я так понял проблему решили. Задаем 2-3 секунды и коптер в течение этого времени стабилизируется, даже если газ в 0.
В свете этого есть ли смысл давать микс на газ, чтобы двигатели всегда крутились? В OpenPilot был параметр минимального газа. Насколько я понял, если коптер хотел крутить двигатель, то он обязательно подавал газ не ниже этого порога. У меня двигатели крутились где-то с 1060мс, но коптер падал периодически после роллов/флипов. Когда увеличил где-то на 20мс коптер больше не падал. В cf/bf алгоритм походу чуть другой.
Тут у людей с FS проблемы были на CC3D: падал коптер ни с того ни с сего. Эта проблема пофикшена? Или может команды:
failsafe_delay, failsafe_off_delay, failsafe_throttle как раз предназначены для того, чтобы коптер не отрубался при малейшей потере сигнала?
Прочитал тему и не нашел ответа на свой вопрос, подскажите, пожалуйста.
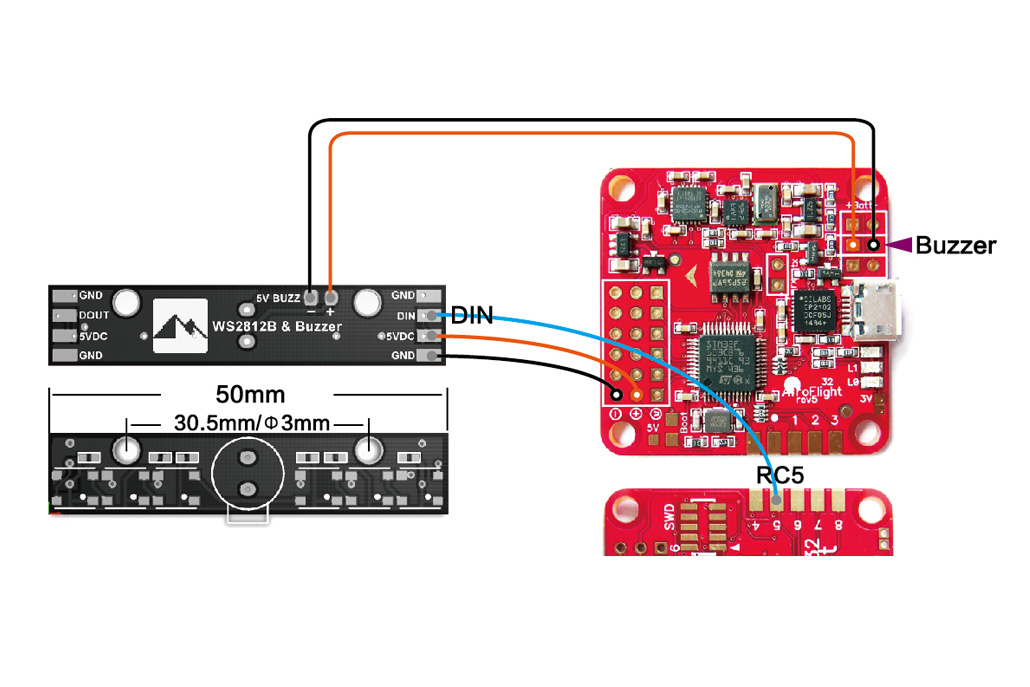
Имеется наза32 (вер.6) + приемник D4R-II подключенный к назе по PPM. Вопрос следующий - как подключить к назе вот эту пищалку fpvmodel.com/matek-3-in-1-battery-monitor-discover… , чтобы она включалась с тумблера?
- Там где двойная фишка + и - взял с акка
- Там где тройная + и - взял с 5в от видеопередатчика fx795t, а сигнальный с пина назы + VBat
- в CleanFlight (прошивка последняя от Бориса) выставил включения Buzzer’a с тумблера.
Проблема в том, что пищалка не работает! Наза на тумблер реагирует (тумблер включаешь - наза начинает моргать диодами), а пищалка молчит! Такое ощущение, как будто сигнальный провод не подключен.
На втором коптере тоже CF c прошивкой от Борис, наза32 (вер.6) и D4R-II по РРМ. Разница только в том, что на этом коптере к назе подключена обычная пищалка. Подключена к + и - пинам на разъеме VBat. С тумблера все работает.
Может я что-то не так делаю?
закоротив контакты на плате.
Я прошился не коротя контакты
Так вроде ж дефолтные пиды. Взлетит!
Очень дёргается, не стал взлетать выше полуметра. Надо просто Р уменьшить или пид контроллер сменить на другой?
Очень дёргается, не стал взлетать выше полуметра
“Дергаться” можно по-разному. Если это осцилляции, то в зависимости от их частоты нужно грешить или на P, или на I составляющую. Попробуйте P понизить раза в два и посмотреть на поведение. А вообще в BF есть GTUNE, на CC3D правда пляски нужны, чтобы прошивку с поддержкой этой фичи получить.
Проблема в том, что пищалка не работает!
Насколько я понимаю, все пищалки с Y-кабелем начинают работать сами по прошествии некоторого времени, если сигнал в канале не меняется. Причем сигнал должен быть обычным PWM, с oneshot не прокатит.
Если PIDы не правильные, то смена пидконтроллера не поможет. Хорошо летают что 1й, что 2й. Да и харакири хорошо летает, только непопулярен.
Насколько я понимаю, все пищалки с Y-кабелем начинают работать сами по прошествии некоторого времени, если сигнал в канале не меняется. Причем сигнал должен быть обычным PWM, с oneshot не прокатит.
Если PIDы не правильные, то смена пидконтроллера не поможет. Хорошо летают что 1й, что 2й. Да и харакири хорошо летает, только непопулярен.
Не совсем понял, что ты имел в виду.
Харакири имеет смысл) но это точно не для новичка - флипы идут в 3-4 раза быстрее, чем на 0м контроллере.
вот мой пример (сорри за качество видео)
Это не просто пищалка. Это мониторинг разряда батареи и + поисковое устройство.
Пищать она начинает, если просел акк, или же если на вход не подаётся PPM сигнал, который тройником берётся с одного из каналов. например с газа.
Для того чтобы на назе пищалка работала с тумблера, надо подключить пищалку с генератором, прямо к контактам buzzer
Это не просто пищалка. Это мониторинг разряда батареи и + поисковое устройство.
Пищать она начинает, если просел акк, или же если на вход не подаётся PPM сигнал, который тройником берётся с одного из каналов. например с газа.Для того чтобы на назе пищалка работала с тумблера, надо подключить пищалку с генератором, прямо к контактам buzzer
На этой пищалке 3 контакта: +, -, сигнальный.
На назе 2 контакта под buzzer: + и -.
Если подключать + к +, - к -, то не работает. Если подключить +к+, -к сигнальному, то опять же не работает.
Откуда можно взять с назы сигнальный провод, если приемник подключен по ррм?
На назе 2 контакта под buzzer: + и -.
Для понимания видео, владеть английским не обязательно.
На этой пищалке 3 контакта: +, -, сигнальный. На назе 2 контакта под buzzer: + и -. Если подключать + к +, - к -, то не работает. Если подключить +к+, -к сигнальному, то опять же не работает.
На этой пищалке якобы есть три режима писка. Второй (F2) типа можно включить писк с тумблера. Третий (F3) включится сам, когда не будет изменения сигнала в канале в течение одной минуты. Эти режимы противоречат друг другу в определенной степени.
Напрямую вашу пищалку подключить у контактам буззера на Назе32 нельзя. Это же логично и элементарно. К Назе32 подключается неумный буззер без платы. Если вы из своей платы выпаяете пищалку, вот тогда сможете подключить буззер напрямую к Назе32.
Если вы из своей платы выпаяете пищалку, вот тогда сможете подключить буззер напрямую к Назе32.
И то не факт!
В этой пищалке может не быть генератора!
Это да. Забыл этот нюанс.
Подскажите, есть контроллер dodo и naze32. И там и там стоит betaflight последний.
Вроде как видел, что на dodo можно looptime поставить меньше 1000.
Смотрю в dump нету там looptime, делаю set looptime=1000 говорит нет такой переменной.
В конфигураторе, на вкладке Configuration есть looptime, изменяю, жму save, контроллер перезагружается стоит старое значение.
Что я делаю не так? )
ЗЫ. Пид контроллер 2
Больше не нужен этот параметр. Теперь цикл синхронизируется с чем-то там и составляет порядка 1000. Смотрите в конфигураторе внизу в строке пишет текущий луптайм.
Спасибо.
Наверно с гироскопом синхронизируется.
А что нибудь слышно про разгон i2c шины по которой гироскоп подключен? Где то встречал про это, сейчас найти не могу.
Для прошивки подойдёт CC3D CP2102 USB To TTL
или нужен ?
Кто нибудь, кто в инглише силён, может рассказать что он в этом видео объясняет. Я так понял он предлагает наклон контроллера прописать при его ровном расположении , чтобы ролл по оси был при полном газе , а не овал?
Или в чем смысл его видео ?
Включил gtune, полетал, полетал, упал, выключил gtune, снова включил как в видео - ничего не поменялось в пидах. Как пользоваться то правильно?
Для прошивки подойдёт CC3D CP2102 USB To TTL
Подойдет. Этих микросхем довольно много, функционал одинаковый.
Я так понял он предлагает наклон контроллера прописать при его ровном расположении , чтобы ролл по оси был при полном газе , а не овал?
Что-то типа того. Только вот угол всегда разный в полете. Имхо фигня какая-то.
Включил gtune, полетал, полетал, упал, выключил gtune, снова включил как в видео - ничего не поменялось в пидах. Как пользоваться то правильно?
Взлететь, включить, полетать, приземлиться, дизармнуть, подключить к компу и посмотреть на ПИДы. А вообще без компа надо после посадки дизармнуть, а уже после этого передернуть тумблер GTUNE.
Или в чем смысл его видео ?
Утверждает что полетный контроллер всегда нужно ориентировать в одной плоскости с двигателями ( получается что это нужно делать даже тогда когда есть проставки под моторы). Та рама которая стоит на уже пустой рюмке я понял сделана с бодуна 😃
А что нибудь слышно про разгон i2c шины по которой гироскоп подключен?
Это одна из головных болей Бориса, он проводит подобные эксперименты, измеряет при этом нагрузку на проц итд Я сильно не вникал, сделал для себя один вывод, контроллер нужно покупать F3, имея ввиду уже F4. Если владеете английским это нужно идти на форум RCG и читать постинги автора прошивки, там он иногда поднимает эту тему.
Включил gtune, полетал, полетал, упал, выключил gtune, снова включил как в видео - ничего не поменялось в пидах. Как пользоваться то правильно?
PID1, рейт, GTune, посадка, дизарм, отключить Gtune, включить ( происходит запись новых параметров), выключить. Готово. Что из этого было не так ?
PID1, рейт, GTune, посадка, дизарм, отключить Gtune, включить ( происходит запись новых параметров), выключить. Готово. Что из этого было не так ?
Ну я второй номер пидов пытаюсь настроить и в стабилизации, взлетаю, включаю тюн, летаю, сажаю, дизарм, отключил тюн, включил тюн, выдернул питание. И ничего опять не произошло. Я думал в стабилизации надо настраивать)
чтобы ролл по оси был при полном газе , а не овал?
Ролл по оси камеры а не коптера человек хочет. Собственно вопрос возникает простой - кто летает то, коптер или пилот коптера 😉
Утверждает что полетный контроллер всегда нужно ориентировать в одной плоскости с двигателями ( получается что это нужно делать даже тогда когда есть проставки под моторы).
Вот мне как раз показалось что он этим видео хочет сказать , что наклон контроллера должен быть прописан не в плоскости моторов, а в плоскости камеры. Нужно практически попробовать, но у меня большие сомнения, что что-то кардинально поменяется. Я не замечал что при ролле квадрик крутится не по оси камеры, единственное если газ не бросить, то получается вращение по овалу, как бы через бок. Может он этой настройкой хочет решить эту проблему.
Не совсем. Формально там надо еще делать переключение профилей и сохранение рейтов профилей. Но… Насколько я понимаю, cf/bf не поддерживает переключение профилей с аппаратуры, и это не очень. OP поддерживал. Так что бэкап профилей не очень то и нужная штука.
Команды были типа
set profile 1
dump rates
Ну на тумблер же вешается смена профилей, по крайней мере я всегда на второй переключаю и на плате что то моргает в подтверждение.
И если просто dump - то сразу всё сливает, там уже можно вырезать лишнее.