Прошивки CleanFlight/BetaFlight для полетников

нет по фпв. пиды не настроенные. мелкая тряска не заметна. может влияет линза 2.1
Наверно, у меня 2.5-2.8 и тряску жрущую половину полетного времени я замечаю всегда )
Добрый день. Помогите решить проблему. Имеется коптер с регулями dys 16a прошивка blhely 14.8. моторы dys 1806 решил перейти на контроллер naze 32 f3. Установил прошивку от Бориса 3.0.1 произвел настройки в клинфлае. Но контроллер отказывается армится. Пробовал различные версии прошивок но без успешно. В клинфлае отбражаются движения стиков, Акселерометра и гироскопа, можно провести тест моторов, но армится ни в какую не хочет.
Добрый день. Помогите решить проблему. Имеется коптер с регулями dys 16a прошивка blhely 14.8. моторы dys 1806 решил перейти на контроллер naze 32 f3. Установил прошивку от Бориса 3.0.1 произвел настройки в клинфлае. Но контроллер отказывается армится. Пробовал различные версии прошивок но без успешно. В клинфлае отбражаются движения стиков, Акселерометра и гироскопа, можно провести тест моторов, но армится ни в какую не хочет.
Для “бетафлай” прошивки лучше используйте “бетафлай конфигуратор”, попробуйте через него заново прошить и настроить…
А что за “бетафлай” прошивка? Ещё один форк вроде бетафлайт и рейсфлайт?
но армится ни в какую не хочет.
высокий минтротл, коптер не в горизонте.
А что за “бетафлай” прошивка? Ещё один форк вроде бетафлайт и рейсфлайт?
ага. с ГМО. ДНК мухи используется вместо PIDC
вопрос возник. коптер с камерой. иногда при резкой остановке после флипа. бывает чуть пружинит. (рейты относительно высокие 1250град сек)
как бы Д и так высокий. совсем задирать под 50 думаю не оч хорошая идея . или нет?
насмотришься разных видосов. типа как Стилл летает итд. у них коптер никогда не пружинит. или они так управляют. и дай мне полетать на их коптере, я получу тот же самый эффект?
Меня мучает вопрос: почему все пытаются задирать Д? Это мода такая, что ли.
вопрос возник. коптер с камерой. иногда при резкой остановке после флипа. бывает чуть пружинит. (рейты относительно высокие 1250град сек)
как бы Д и так высокий. совсем задирать под 50 думаю не оч хорошая идея . или нет?
Может быть стиком дергаешь не замечая того. Если летаешь на бнках можно поставить легкие типа 5040х3, с ними не нужно совсем заморачиваться с пидами что б отскок победить. Может P недостаточно или слишком много 😁
Меня мучает вопрос: почему все пытаются задирать Д? Это мода такая, что ли.
при высоких рейтах, когда коптер нагружен камерой, то при резкой остановке. нет нет . да коптер имеет склонность чуть пружинить.
что несколько портит видео. без камеры по фпв. всё ок.
на 3:29 вот немного видно.
Если летаешь на бнках можно поставить легкие типа 5040х3
они не тянут.
Просто Д работает в связке с П. Если задираете Д - значит слишком большой П. И - компенсация постоянной ошибки: геометрии, развесовки и других недостатков конструкции.
Просто увеличивая Д вы тем самым увеличиваете частоту осцилиляций которые глазу не видны и из-за этого нагрев моторов и уменьшение времени полёта.
На форуме редко вижу что уменьшают П, почему то увеличивают Д.
Так же не забывайте что когда вы ставите более злые пропы и большее банок акка, тем самым увеличиваете тоговооруженность замкнутой системы управления и требуется уменьшать П, так как из-за большей тяги коптер быстрей выходит на нужный угол. В этом случае надо уменьшать П а не увеличивать Д.
Тут как то на форуме Сергей выкладывал классную гифку которая показывает как влияют параметры ПИД на реакцию на сигнал. Просто правильно подобранные П и Д уменьшают время выхода на заданный угол коптера.
при высоких рейтах, когда коптер нагружен камерой, то при резкой остановке. нет нет . да коптер имеет склонность чуть пружинить.
что несколько портит видео. без камеры по фпв. всё ок.
Теоретически: добавив камеру, вы увеличиваете вес коптера, уменьшив тяговооруженность системы, поэтому чисто теоретически нужно увеличивать П. Плюс камера установлена впереди, тем самым меняется развесовка коптера (смещение Центра тяжести) то здесь надо изменять И (вот тут не скажу, так как пока до конца не могу понять куда крутить). А Д крутят только когда при увеличении П начинают осцилляции (перерегулирование)
они не тянут.
И ломаются легко тогда уж. Я же не спрашивал про их минусы 😃
вопрос возник. коптер с камерой. иногда при резкой остановке после флипа. бывает чуть пружинит. (рейты относительно высокие 1250град сек) как бы Д и так высокий. совсем задирать под 50 думаю не оч хорошая идея . или нет?
Может это поможет, прошивка 3 0 1 : Helps better against bounce backs on higher rates with high setpoint weight То есть когда высокие рейты и высокий setpoint weight помогает уменьшить отскок ( пружину ). То есть это происходит когда “higher rates with high setpoint weight” То есть чтобы убрать отскок нужно уменьшить высокие рейты и high setpoint weight
( как вариант ) Можно попробовать, причина описана автором прошивки…
Покажите гифку плиз про PID о которой выше речь.
Я тут созрел настроить PID, всегда летал на стоковых, но думаю
уже смогу разобраться и сделать поведение квадрика ещё лучше.
Ветер стихнет на улице и пойду ковырять, больше всего меня интересует настройка I для стабильного прямолинейного полёта низко над землёй.
То есть это происходит когда “higher rates with high setpoint weight” То есть чтобы убрать отскок нужно уменьшить высокие рейты и high setpoint weight
( как вариант ) Можно попробовать, причина описана автором прошивки…
немного не понял. он убрал это проблему в патче 3.0.1?. или он о этой проблеме знает . и рекомендует делать поменьше рейты и сетпоинт Д?
Записал BlackBox и не могу понять - есть параметр gyro_pre_notch - это видимо RAW данные до обработки фильтром.
А как посмотреть данные после обработки?
А debug[0] совсем нет у меня… хотя set debug_mode = notch я сделал.
Вот сам лог - d.pr/f/ISGe
Сам полет
Жду диагноза от Сергея 😄
немного не понял. он убрал это проблему в патче 3.0.1?. или он о этой проблеме знает . и рекомендует делать поменьше рейты и сетпоинт Д?
Да, что то из этого нужно уменьшать, я бы попробовал уменьшить сетпоинт Д. Отскок лечится увеличением D в нормальных условиях, тут чуть замутили настройки, причина почему может возникать отскок написали, значит нужно уменьшить то что это вызывает. На сколько не скажу, но попробуйте с сетпоинт Д в сторону уменьшения и хотелось бы результат чтобы понять правильно или нет…
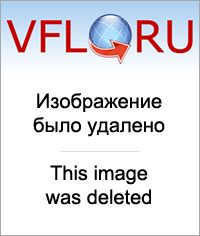
Вот мой график по роллу с минимум пидов - осцилляции:
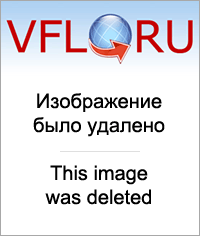
Вот Михаила с стоковыми высокими пидами - никаких осцилляций:
Жду диагноза от Сергея
Я что самый большой спец ? 😃 Я посмотрел. Если смотреть за гирой она плавно меняет свое положение, а вот реакция PID контроллера неадекватная. D следует за P синхронно без отставания, это говорит что контроллер фильтрами не задавлен ( нет отставания ) а вот сами значения P как по ролу так и по питчу завышены и сильно. Попробуйте уменьшить и там и там. По картинке на видео летит красиво, Борис писал что пока не было блекбокса голова не болела, всем казалось что все нормально, теперь появились проблемы 😃


PS Я посмотрел еще на малом газу и когда правый стик в центре ( квадрик падает ) есть колебания и по питчу и по ролу ( маленькие ) это признак что нужно чуть увеличить I это оно отвечает за это
Ну, а кто ещё кроме тебя может прочитать логи )))
Летит хорошо это точно 😃 поднял P почти в два раза от стоковых, в LOS и FPV вибраций и трясок нет.
А как поняли, что значения P завышены?
Про BlackBox Борис прав, ка убыть летает хорошо, а графики глаз не радуют.
А что насчёт моего вопроса про данные notch?
На сколько не скажу, но попробуйте с сетпоинт Д в сторону уменьшения и хотелось бы результат чтобы понять правильно или нет…
полетал ещё и заметил. что болтает после переворота и резкой остановки. когда газ в нуле. видимо что то не хватает для чёткой стабилизации коптера. а если держать немного газ. то вроде норма. видимо придётся это учитывать в полёте. и не останавливать резко коптер в нулевом газе.
ибо понижать рейты и уменьшать сетпоинт Д. для меня не приемлемо