Как работает вертолет

Как я понял, изменяется не плоскость вращения, а циклический шаг самих лопаток. В результате они начинают циклически качаться(то есть изменяется плоскость их вращения)… Ну а дальше как вы написали.
Все правильно.
Кроме того не забывайте что сами лопатки обладают некоторой массой и гироскопическим эффектом
если плоскость вращения винта случайно отклонится(порывом ветра) то плоскость вращения свободно подвешенных лопаток не изменистся и через тяги цикличесого шага они будут стараться вернуть винт на место.
Чем тяжелее лопатки тем вертолет висит стабильнее но рулится хуже. Я пробовал вешать грузики в виде трубочек с винтиком фиксации на ось серволопаток. Подбирал оптимальную устойчивость-управляемость на самоделке.
Я думаю я примерно понял…
Но у меня есть еще один вопрос… Вы бы не могли заглянуть на эту ссылку?
www.angelfire.com/blues/…/rotor_head.htm
Как это работает там?
Благодарю за помощь.
Как я понял, изменяется не плоскость вращения, а циклический шаг самих лопаток. В результате они начинают циклически качаться(то есть изменяется плоскость их вращения)… Ну а дальше как вы написали.
Нет, не правильно. У лопаток нет цилического шага. Изменяется именно плоскость вращения серволопаток, скажем так, относительно оси вращения Основного Ротора, а они уже в свою очередь изменяют циклический шаг лопастей, при этом плоскость вращения лопастей О.Р. относительно оси вращения ротора не меняется (если нивелировать отклонение в дэмферных кольцах).
В указанной Вами ссылке изменение шага лопастей О.Р. передаётся непосредственно с шайбы автомата перекоса без механизма сервооси и серволопаток.
А как это работает здесь?
А как это работает здесь?
Я не могу понять что изображено. Делал выводы, посмотрев здесь.
Скан из книжки по вертолётам, описана схема работы НВ с постоянным шагом.
Скан из книжки по вертолётам, описана схема работы НВ с постоянным шагом.
Добрый день. Это приведена схема вертолёта с постоянным шагом винта и движение осуществлятся за счёт наклона плоскости вращения О.Р.(примерно так реализованы соосники). В схеме с циклическим шагом изменения плоскости вращения О.Р. относительно вертолёта нет. Если не прав - поправьте. ☕ 😃
Нет, не правильно. У лопаток нет цилического шага. Изменяется именно плоскость вращения серволопаток, скажем так, относительно оси вращения Основного Ротора, а они уже в свою очередь изменяют циклический шаг лопастей, при этом плоскость вращения лопастей О.Р. относительно оси вращения ротора не меняется (если нивелировать отклонение в дэмферных кольцах).
Есть у лопаток циклический шаг. Поставьте их перпендикулярно оси ротора и покачайте относительно своей оси(при этом угол атаки на одной лопатке будет увеличивалься, а на второй - уменьшаться). Что произойдет? Будет наклоняться тарелка автомата перекоса. Затем оставьте серволопатки перпендикулярно оси ротора в каком либо из крайних положений(завернутых относительно своей оси) и повращайте ротор. Увидите как будет меняться циклический шаг самих лопаток. И именно из-за этого шага и меняеться плоскость вращения.
Это приведена схема вертолёта с постоянным шагом винта и движение осуществлятся за счёт наклона плоскости вращения О.Р.(примерно так реализованы соосники). В схеме с циклическим шагом изменения плоскости вращения О.Р. относительно вертолёта нет. Если не прав - поправьте. ☕ 😃
Принципиальных различий нет. И изменения плоскости основного ротора нет ни у одного вертолета. Там просто проще схема. Достаточно одной тяри от сервооси(но ставят две, что бы распределить нагрузку) т.к. лопасти сидят на одной оси и увеличив угол атаки одной лопасти, мы автоматом уменьшим его у другой.
В указанной Вами ссылке изменение шага лопастей О.Р. передаётся непосредственно с шайбы автомата перекоса без механизма сервооси и серволопаток.
Я ссылок не указывал…
Это к тому, что надо указывать кому отвечаешь.
Добрый день. Это приведена схема вертолёта с постоянным шагом винта и движение осуществлятся за счёт наклона плоскости вращения О.Р.(примерно так реализованы соосники). В схеме с циклическим шагом изменения плоскости вращения О.Р. относительно вертолёта нет. Если не прав - поправьте.
Движение за счёт наклона плоскости вращения О.Р. относительно фюза применяется очень редко, в основном в автожирах и простейших мелких вертолётах, одну такую самоделку видел на каком то авиасайте, вал винта установлен на кардане, а нижняя часть вала является ручкой управления. Такая схема требует больших усилий для управления и есть опасность отрубить хвост. Единственное её достоинство-простота, автомата перекоса нет. В магазинных модельках такой схемы не встречал, у всех плоскость винта не отклоняется относительно фюза (вернее немного отклоняется за счёт упругости лопастей и всяческих резинок в голове ротора).
Схема приведённая в моём предыдущем посте в чистом виде применяется в шмелях, жабах и прочих клонах недовертолётов такого уровня.
Ешшо один скан из той же книжки про автомат перекоса.
В этой ссылке на сколько я понимаю сама ось не меняет угол, но лопасти винта могут наклонятся, правильно?
А серво поворачивает маленькие лопасти?
Зачем тогда еще один серво? Мне немного трудно обьяснить что я имею ввиду, просто я пытаюсь понять как это работает там…
И изменения плоскости основного ротора нет ни у одного вертолета. Там просто проще схема. Достаточно одной тяри от сервооси(но ставят две, что бы распределить нагрузку) т.к. лопасти сидят на одной оси и увеличив угол атаки одной лопасти, мы автоматом уменьшим его у другой.
Читаем описание конструкции:“Лопасти несущего винта жёстко закреплены на втулке, подвешенной на валу на карданном подвесе _ " и далее по тексту:" _ В результате плоскость вращения лопастей меняет наклон, что вызывает поворот вектора тяги несущего винта.”
Изменение вектора тяги за счёт изменения плоскости вращения применяется в моделях соосников Лама, Валкера.
Изменение вектора тяги за счёт изменения плоскости вращения применяется в моделях соосников Лама, Валкера.
На счет Ламы вы точно не правы. На счет остального - думаю тоже.
Заглянем в ветку “Lama2. Люди, обменяемся опытом?”.
Видим нижний ротор(немного в апгрейде, просто фотка на которой лучше всего видно):

Тяги от тарелки автомата перекоса идут прямо к нижнему винту. Причем перпендикулярно оси, на которой сидят лопасти нижнего винта. Если нагнуть тарелку перекоса, то одна тяга пойдет вверх, другая - вниз. При этом они наклонят лопасти так, что на одной увеличится угол атаки, а у другой уменьшиться. Наклона плоскости вращения не происходит. При вращении тяги будут ходить вверх-вниз циклически уменьшая-увеличивая угол атаки на лопастях.
Теперь посмотрим на верхнний ротор(тоже немного в апгрейде):

Сервоось не сождержит лопаток - только грузики. Тяга всего одна, которая точно так же изменяет циклически угол атаки лопастей. Сама ось никак не управляется, и нужна только как “механический гироскоп”.
Я извиняюсь что надоедаю со своим вопросом, но мне очень интересно как это работает на этом сайте…
www.angelfire.com/blues/heli_project/
Вы бы не могли посмотреть и попытатся обьяснить мне? Я был бы очень благодарен…
Я извиняюсь что надоедаю со своим вопросом, но мне очень интересно как это работает на этом сайте…
www.angelfire.com/blues/heli_project/
Вы бы не могли посмотреть и попытатся обьяснить мне? Я был бы очень благодарен…
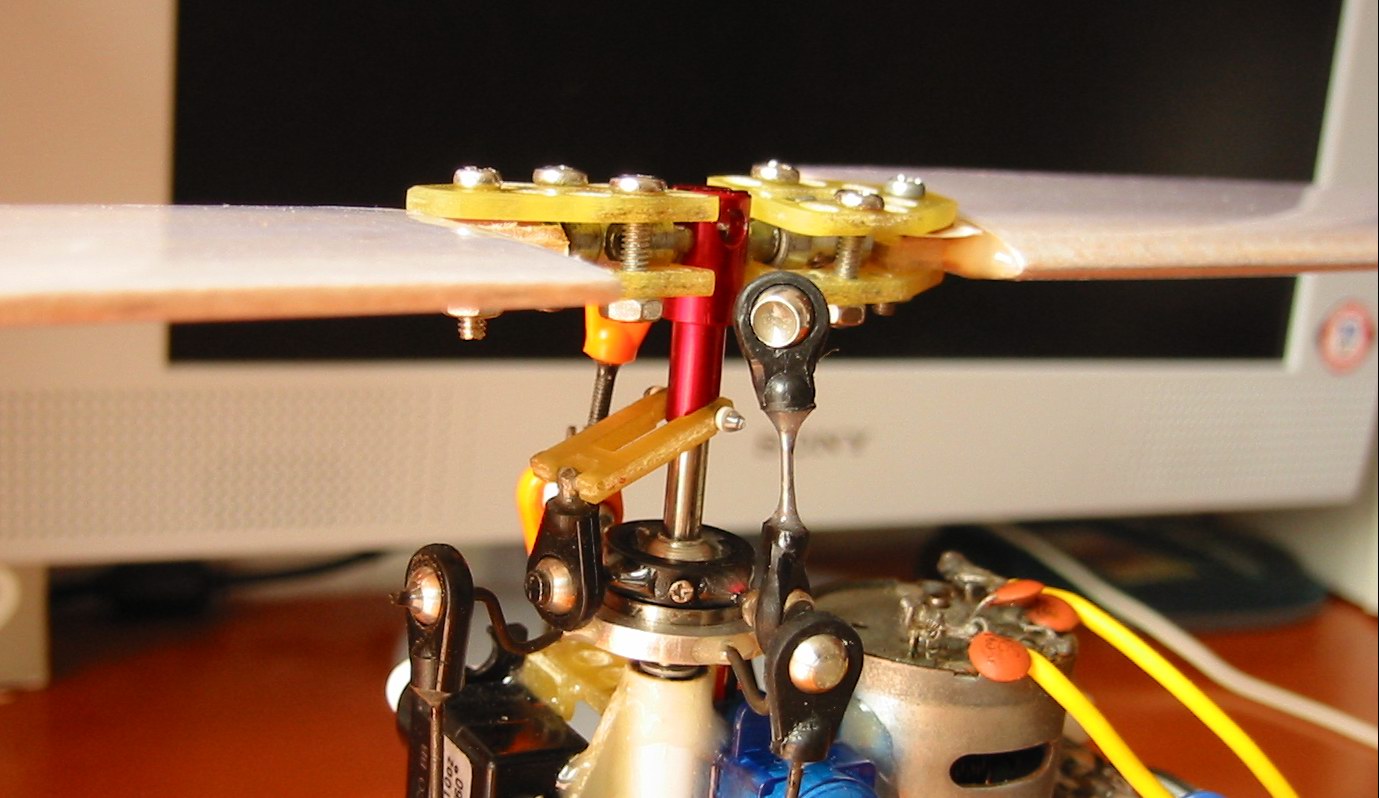
На фото:

Изображена головка без коллективного шага(только циклический). Изменение наклона тарелки перекоса через тягу управляет циклическим шагом сервооси. Сервоось меняет свою плоскость вращения и наклоняясь меняет циклически шаг основных лопастей.
На этом фото:
Изображена головка с коллективным шагом. Сервоось отсутствует. Принцип похож на Ламовский, что я описывал, но лопасти не соединены жестко и управляются отдельно, каждая своей тягой. Если наклонить тарелку перекоса, то на одной лопасти угол увеличится, а на другой - уменьшится. А если её поднять вверх, то угол увеличится на обоих лопастях.
Примерно так…
Я извиняюсь что надоедаю со своим вопросом, но мне очень интересно как это работает на этом сайте…
На верхней фотке конструкция работает по схеме описанной на первом скане выложенныом мной, несущие лопасти жёстко связаны между собой через втулку. На нижней фотке управление от автомата перекоса идет напрямую на несущие лопасти, серволопаток нет, несущие лопасти между собой не связаны, каждая на своём шарнире, обычно это делается для возможности изменения общего шага, но в данной конструкции общий шаг постоянный (нет третьей сервы). В общем, это усложнение шарнира не имеет особого смысла, управлять жестко связанными лопастями напрямую от автомата перекоса тоже можно и конструкция проще, я так делал на шмеле, он стал резкий как понос, но учитывая качество его гиры и вообще электроники управлять им стало сложнее.
Если конструкция как на первой фотке, где маленькие лопасти вращаются только вокруг своей оси, как вертолет может летать вперед/назад?
Что на этом фото тарелка перекоса? Черное кольцо? Оно разве не сидит жестко на оси?
Серебристое с черным. Сидят не жестко. Могут наклоняться в разные стороны. Серебристое и черное соединены вместе, но так, что черное может свободно вращаться вокруг своей оси. Наклонив тарелку и вращая винт, линк соединенный с черным кольцом ходит вниз-вверх, циклически меняя шаг серволопаток.
P.S. Т.к. с отображением фоток могут быть проблемы, дам ссылки: Фото 1, Фото2.
Кусок из книги. Может будет интересно.
И, в догонку, еще кусок с боле конкретными описаниями.
Движение за счёт наклона плоскости вращения О.Р. относительно фюза применяется очень редко, в основном в автожирах и простейших мелких вертолётах, одну такую самоделку видел на каком то авиасайте, вал винта установлен на кардане, а нижняя часть вала является ручкой управления.
Нет у большинства легких автожиров все чуть сложнее.
Да Вы непосредственно отклоняете ВАЛ винта ну скажем вперед. Но лопасти то стоят на общем горизонтальном шарнире (если одну лопасть поднять другая опустится) со свободным ходом около 8-10 градусов дальше демфер.
Так что непосредственно весь несущий ВИНТ вы не наклоняете (шарнир то работает и он вам не даст вам непоредственно приложить от вала к лопасти силу вверх или вниз) вы наклоняете только ВАЛ а плоскость винта сначала сохраняется. А дальше все как в классическом автомате перекоса за счет изменения циклического шага в те моменты когда лопасти перпиндикулярны направлению наклона вала плоскость винта постепенно отклоняется пока не станет перпиндикулярно валу.
Так что это тот же АП но с фиксированным общим шагом и потому простейший.