savage xs

Куда копать пока не соображу.
Потенциометр возможно, раскидай серву, посмотри чо там, почисти…
Пиньён не менял.
А стоило. Зубья то уже по степени износа разные, соответсвенно и их форма. И звук тоже, скорее всего из-за этого
Еще раз повторю, сказанное выше относится к простой волновой обмотке якоря, т.к. для других типов обмотки может не выполнятся условие 2а=2 и N может не быть равным числу витков…
Но характер зависимости не изменится. Меняться будут только коэффициенты
Т.е при более высоких об/в (соответственно меньшем количестве витков) момент, развиваемый при одинаковом токе (при сравнении двух двигателей), будет ниже.
Только ток в нашем хоббийном применении одинаковым не будет.
Да вроде, нет 😎.
Считаю, что ток отдельно от развиваемого момента вообще нельзя рассматривать.
Хоббийный привод управляет напряжением. Ток зависит от напряжения.
- Момент двигателя не зависит от приложенного напряжения. Только от тока якоря и от конструкции двигателя. Причем момент тем больше, чем больше количество витков и/или полюсов.
Но ток зависит от напряжения. Закон ома.
Нажимая на курок газа вы управляете именно напряжением. Неужели момент не зависит от курка газа?
- А вот что касается kV… Как видно из первой формулы член U/kФ (иначе называемое - частотой идеального холостого хода) тем меньше, чем больше р и N. т.е. параметр обороты-на-вольт уменьшается с ростом числа полюсов и/или витков.
Всё верно.
- Что касается приложенного напряжения. Как видно из приведенного выше, ток якоря не зависит от приложенного напряжения - он зависит только от момента сопротивления на валу, и конструкции двигателя (I=М/kФ, смотря что нам задается: ток или момент). Т.е. чем больше мы грузим двигатель - тем больше тока он ест. От напряжения зависит только частота идеально холостого хода и, соответственно, обороты при заданном токе (моменте) - “высота” характеристики.
Что же по вашему зависит от напряжения то? Дело в том что ток, который двигло может взять с регуля для обеспечения момента на валу, ограничен напряжением. За счет этого эффекта мы и регулируем курком момент/скорость.
- Сопротивление якорной цепи - чем меньше - тем выше обороты при заданном токе/моменте и тем более жесткая характеристика .
Это очень важно. Вы формулу написали, но пользоваться ей не пробовали. Примените её к хоббийным движкам.
- Максимальное допустимое напряжение определяется только электрической и тепловой стойкостью изоляции, способностью двигателя рассеивать тепло и механической прочностью его конструкции.
Да. Всё верно. В нашем случае перегрев выходин на первое место.
- Максимальный ток, который может протекать по обмотке двигателя, как правило многократно превышает его номинальные параметры. Поэтому утверждение, что “двигатель больше тока не возьмет” - неверно. Приведу пример: моторчик Scorpion SII-2212-960kV имеет длительный (рабочий) ток всего 13 А. Сопротивление его обмоток 0,139 Ома. При максимальном возможном моменте (т.е. при котором двигатель останавливается) и оборотах равных 0 ток на трех банках лития превысит 100А (если регулятор и аккумулятор смогут его отдать)! Естественно, это приведет к почти мгновенному разрушению обмотки, но тем не менее…
Я это утверждал?
Если где-то наглючил - прошу сильно не пинать.
А теперь от теории к практике.
Вот линейка движков:
hobbyking.com/…/__23356__Turnigy_TrackStar_4_5T_Se…
hobbyking.com/…/__23358__Turnigy_TrackStar_5_5T_Se…
hobbyking.com/…/__23360__Turnigy_TrackStar_8_5T_Se…
hobbyking.com/…/__23361__Turnigy_TrackStar_10_5T_S…
Хороша тем, то выдано довольно много параметров. Нам этого достаточно чтобы применить вашу первую формулу, не добавив ничего от себя.
Рассчитаем по первой формуле момент. Момент на заданных оборотах.
www.dropbox.com/s/bbl7n4w341o795c/torque.png
Эта формула дает нам возможность построить график зависимости момента от оборотов. Что мы и сделаем для этих четырех двигателей.
www.dropbox.com/s/v2aqx5naqlh23sz/torque.xlsx
www.dropbox.com/s/…/torque_graph.png
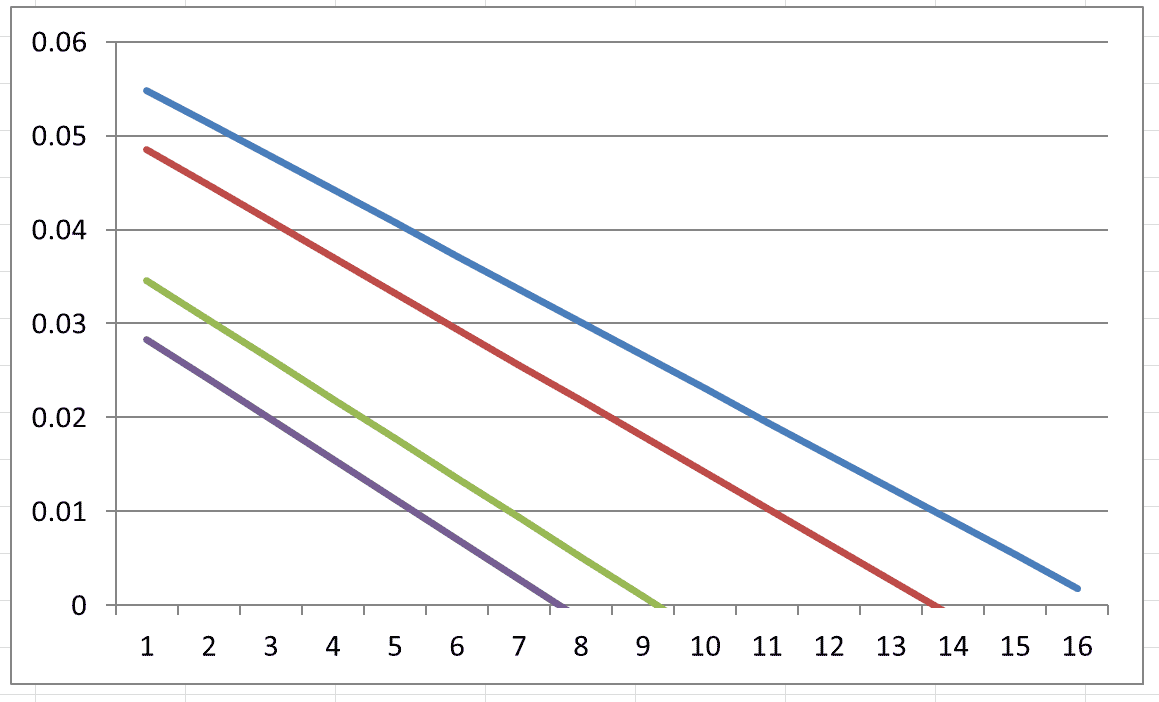
На графике по оси Y момент в условных величинах, на оси X обороты в тысячах.
Из чего мы видим что при равном напряжении двиглы одинаковой конструкции и размера, но с разным количеством витков (разным kV) относятся друг с другом совершенно однозначно - двигло с меньшим количетвом витков (Большим kV) полностью перекрывает по всем параметрам, включая момент на валу на всех оборотах, двигло с большим количеством витков (меньшим kV).
И такая петрушка практических на всех конкурентноспособных движках в нашем хобби. Примените формулы, это не так сложно.
ЗЫ Теперь я знаю почему сгорел мой 120а регуль на малых оборотах 8)
Но ток зависит от напряжения. Закон ома.
Нажимая на курок газа вы управляете именно напряжением. Неужели момент не зависит от курка газа?
…
Что же по вашему зависит от напряжения то? Дело в том что ток, который двигло может взять с регуля для обеспечения момента на валу, ограничен напряжением. За счет этого эффекта мы и регулируем курком момент/скорость.
Ток ДПТ НВ зависит от а) нагрузки на валу б) конструкции двигателя в) способности источника энергии его отдавать.
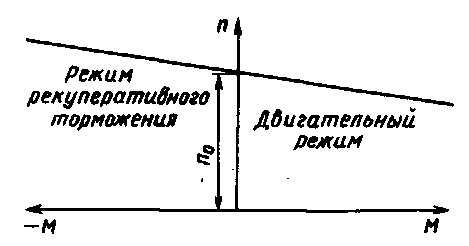
Вот смотрите. По второй формуле из моего поста построена электромеханическая характеристика двигателя. Это возможно потому что у нас ток пропорционален моменту, т.к. kФ постоянная
На графиках видно, что при разном питающем напряжении ток/момент будет один и тот же. Таким образом, ток от напряжения питания не зависит. От напряжения зависят обороты.
Формула закона Ома для вращающейся обмотки будет немного отличаться от привычной записи и включать в себя противоЭДС. И вырождается в привычный I=U/R только при оборотах равных 0.
Я это утверждал?
Нет, но пост адресован не только Вам. Хотя, Константин, тоже этого не утверждал - мне просто показалось это интересным.
Ваша формула верна алгебраически (вывели Вы ее верно), но совершенно бессмысленна физически. Обороты (вернее угловая скорость) - функция от момента и напряжения. А не наоборот. Момент, как я уже писал, равен M=k*Ф*I. И не зависит ни от оборотов, ни от напряжения.
Вот смотрите - приведу близкий пример: из закона Ома известно U=I*R => R=U/I. Т.о. можно сделать вывод, что сопротивление зависит от напряжения и тока, а на самом деле оно зависит только от свойств проводника - удельного сопротивления материала, площади поперечного сечения и длинны - R=pS/l.
Ну и соответсвенно все последующие рассуждения…
Примените формулы, это не так сложно.
No comment…
в) способности источника энергии его отдавать.
Вот регулятор хода и работает так, что по сути не дает ток, который просит двигло.
R=U/I. Т.о. можно сделать вывод, что сопротивление зависит от напряжения и тока, а на самом деле оно зависит только от свойств проводника - удельного сопротивления материала, площади поперечного сечения и длинны - R=pS/l.
Не важно что от чего зависит. Важно что и для чего мы рассчитываем. Я постоянно пользуюсь R=U/I когда мне нужно рассчитать нужный номинал сопротивления при известном напряжении и токе. Тоже самое я и сделал выше с моментом. Формулы на то и формулы, что при известных одних величинах можно рассчитать неизвестные.
У меня получился по сути график torque-speed curve, зависимость момента от скорости, который приводится для всех типов двигателей и который по вашему не имеет смысла.

От напряжения зависят обороты.
А от оборотов зависит момент.
Я смотрю тут люди подкованные подтянулись… Может решите задачку давно меня мучающую? Есть мнение, что провода от регуля до движка укорачивать нельзя - при обычном вращении проблем нет, они возникают при торможении. Вот интересно бы узнать на сколько увеличится ток торможения при укорочавании проводов скажем на 1см?
Я смотрю тут люди подкованные подтянулись… Может решите задачку давно меня мучающую? Есть мнение, что провода от регуля до движка укорачивать нельзя - при обычном вращении проблем нет, они возникают при торможении. Вот интересно бы узнать на сколько увеличится ток торможения при укорочавании проводов скажем на 1см?
Ну с этим проблемы. Теория то всегда запросто 😁 , а вот для применения на практике нужны данные, которых, как обычно, не хватает.
Надо подумать…
Я смотрю тут люди подкованные подтянулись… Может решите задачку давно меня мучающую? Есть мнение, что провода от регуля до движка укорачивать нельзя - при обычном вращении проблем нет, они возникают при торможении. Вот интересно бы узнать на сколько увеличится ток торможения при укорочавании проводов скажем на 1см?
Надо знать какой режим торможения реализует регулятор. Реостатное, противовключением или какое другое. Если обычное реостатное, при котором обмотки коммутируются накоротко, а энергия рассеивается в тепло на сопротивлении якорной цепи (всей, включая провода регулятора и коммутирующие ключи), то ток вырастет пропорционально величине изменения сопротивления цепи. Но, поскольку провода регулятора, как правило, куда толще чем провод обмотки, изменение будет скорее всего очень не значительным.
Во всех регулях что я видел (и читал) тормоза были рекуперативные (противовключение, ежели угодно, хотя это не совсем верно. Двигло загоняется в генераторный режим…)
Вся механическая энергия преобразуется в электрическую и загоняется назад в батарею (от чего те иногда дохнут, большое напряжение, большой ток).
Какая связь с длинной проводов - для меня загадка. Откуда пошло поверие то?
Во всех регулях что я видел (и читал) тормоза были рекуперативные (противовключение, ежели угодно, хотя это не совсем верно. Двигло загоняется в генераторный режим…)
Вся механическая энергия преобразуется в электрическую и загоняется назад в батарею (от чего те иногда дохнут, большое напряжение, большой ток).
Какая связь с длинной проводов - для меня загадка. Откуда пошло поверие то?
Пошло от сотен холиваров на тему, что лучше удлиннять/укорачивать провода от от аккумулятора или от двигателя…
Кстати, а как это можно получить рекуперацию при w < w0 и без возможности изменять поток возбуждения?..
.
Хоббийный привод управляет напряжением. Ток зависит от напряжения.
В противовес вашему утверждению могу привести:
Известно, что внешняя нагрузочная характеристика электродвигателя постоянного тока с возбуждением от постоянных магнитов сильно зависит от режима его питания. Поэтому многие моделисты спрашивают, что именно регулирует импульсный регулятор хода: - напряжение, подаваемое на электродвигатель, или его ток?
Формат статьи не позволяет привести здесь подробные теоретические выкладки. Поэтому перейдем сразу к выводам. Как это ни парадоксально, но с точки зрения нагрузочных характеристик электродвигателя, импульсный регулятор хода эквивалентен примитивному реостатному регулятору, упомянутому во введении к статье. Т.е. импульсный регулятор хода регулирует не напряжение, подаваемое на двигатель, и не его ток. Он регулирует сопротивление источника питания двигателя, а значит, подаваемую на него мощность.
Сразу оговоримся, что идеальный импульсный регулятор хода эквивалентен регулируемому балластному реактивному сопротивлению.
Но ток зависит от напряжения. Закон ома.
Нажимая на курок газа вы управляете именно напряжением. Неужели момент не зависит от курка газа?
Момент от газа зависит, так как увеличение скважности увеличивает жесткость (прямая жесткости становится положе, не изменяя своей верхней точки при оборотах холостого хода), и момент на валу изменяется из-за изменения тока. Последовательность зависимостей примерно такая
А теперь от теории к практике.
Работа конечно большая проделана, но увы. По моему, неправильная. Будет посвободнее, посмотрю, может совместно с Андреем что и путное выйдет. Спасибо за подопытные двигатели.
Кроме этого, если б ваше утверждение
Одинаковые движки с разным KV отличаются только числом витков. Чем больше витков тем ниже KV (и момент). Но выше допустимое напряжение.
было верным, то многовитковые двигатели были бы не нужны - мощность ниже, обороты ниже, момент ниже- фигня какая-то выходит. На краулеры ставили бы маленькие движки с 9000об/в с какой нибудь планетарной передачей
Какая связь с длинной проводов - для меня загадка. Откуда пошло поверие то?
Я вот щас наверно глупость скажу, но разве длина проводов, точнее их сопротивление не должно влиять на силу тока при торможении в рекуперативном режиме? И чем они короче, тем ток выше. Не раз наблюдал как дохли регули именно в момент торможения, даже одно время носился с идеей мехтормоза на электричке.
Во всех регулях что я видел (и читал) тормоза были рекуперативные (противовключение, ежели угодно, хотя это не совсем верно. Двигло загоняется в генераторный режим…)
Вся механическая энергия преобразуется в электрическую и загоняется назад в батарею
Режим то генераторный - это верно, но не рекуперативный. Вся выделенная энергия идет исключительно в тепло на проводах, двигателе и ключах регулятора.
А вот батареям становится плохо от режима торможения противовключением. На регуляторах (на всех или некоторых не скажу) настоящее торможение есть только при движении вперед, а когда тормозишь после движения назад - (не уверен, что факт) - торможение происходит как то по другому, и не исключено, что противовключением - отсюда и сверхтоки.
Кроме этого большие токи протекают при пуске двигателя в асинхронном режиме, пока он стоит или вращается еще с недостаточной скоростью
Кстати, а как это можно получить рекуперацию при w < w0 и без возможности изменять поток возбуждения?..
Моментом включения обмоток. У нас тут не коллектор, а микроконтроллер с достаточным количеством мозгов…
Угол опережения меняется так, что теперь имеем запаздывание включения. Момент меняет знак. Если угодно, двигло просто пытается вращаться в другую сторону.
Любая электрическая машина обратима (может работать как двигателем так и генератором) так что вопрос очень странный.
В противовес вашему утверждению могу привести:
отсюда.
Не вижу противоречия, всё верно. Меняется напряжение, меняется и ток. Меня тут пытаются убедить что ток НЕ меняется, а на напряжение совсем пофиг…
Регулятор регулирует мощность (а она уже и есть произведение напряжения на ток) но он может сделать только две вещи. Он может подать полное напряжение батареи. И может его отключить. Просто делает он это очень быстро.
Момент от газа зависит, так как увеличение скважности увеличивает жесткость (прямая жесткости становится положе, не изменяя своей верхней точки при оборотах холостого хода), и момент на валу изменяется из-за изменения тока. Последовательность зависимостей примерно такая
Непонял. Нарисуйте “прямую жесткости” что-ли.
Работа конечно большая проделана, но увы. По моему, неправильная. Будет посвободнее, посмотрю, может совместно с Андреем что и путное выйдет. Спасибо за подопытные двигатели.
Кроме этого, если б ваше утверждение было верным, то многовитковые двигатели были бы не нужны - мощность ниже, обороты ниже, момент ниже- фигня какая-то выходит. На краулеры ставили бы маленькие движки с 9000об/в с какой нибудь планетарной передачей
С таким управлением, как тут у нас в хобби принято, оно всё бы горело. Да и горят движки с высокими KV как спички. Очень просто перегрузить двигло в таких условиях.
Впрочем жду с нетерпением, покажите мне в чем я не прав. Электромеханик я в конце то концов, или нет? 8)
Жесть графики какие то , формулы , это вы про что пишите то ?
Это не наш метод , этот мотор - куевый , этот норм - вот и все )
Это магия! Не всем дано в Хогвардсе учиться. Так что ждите понятных для вас выводов
этот мотор - куевый , этор норм
😃
Я вот щас наверно глупость скажу, но разве длина проводов, точнее их сопротивление не должно влиять на силу тока при торможении в рекуперативном режиме? И чем они короче, тем ток выше. Не раз наблюдал как дохли регули именно в момент торможения, даже одно время носился с идеей мехтормоза на электричке.
Очень трудно вот так просто сказать, нужно исследовать или искать уже сделанные исследования.
www.rc-monster.com/forum/showthread.php?t=18978
Например как это.
Тут проблема даже не в токе. Напряжение может скакнуть очень высоко. Я несколько раз гонял привод саважа на столе. И не от батареи а от лабораторного источника. Он, в отличии от батареи, ток обратно не берет. Как результат - одно неосторожное движение стика и выгоревшие ёмкости на регуле.
Вижу что тут в моторах хорошо разбираются люди , у меня есть вопрос .
Какой мотор выдаст больше крутящего момента ?
Traxxas Titan 550 Motor 12T ( сколько оборотов не нашел , интересно было узнать сколько у него ? ) или HPI Racing Firebolt 15T 540 Motor ( 22000-26000 об мин )
по идеи чем меньше витков , тем быстрее мотор .
Не всякое электротехническое образование предполагает знание, точнее прохождение, предмета “Теория ЭлектроПривода”. А вот переходные процессы - штука, по-моему, вообще загадочная. Они описываются вообще всякими дифуравнениями. Это в теории. А на практике эта штука еще сложнее по одной простой причине - слишком оно всё скоротечное, чтоб такое воздействие отловить простыми приборами. Поэтому этот подход
этот мотор - куевый , этот норм - вот и все )
вполне применим, учитывая закрытые данные как по двигателям, так и по регуляторам.
Объяснить такой подход просто: на выходе нас интересует же только нагрев и скорость - единственныя величина поддающиеся измерению в поле - поэтому не стоит усложнять себе жизнь. RTFM, там обычно пишут, что надо установить, шоб стало хорошо. И если после этого наблюдается перегрев - увеличивай передаточное число (уменьшай пиньон/увеличивай спур). При недогреве - делай наоборот, если оно надо.
Какой мотор выдаст больше крутящего момента ? Traxxas Titan 550 Motor 12T ( сколько оборотов не нашел , интересно было узнать сколько у него ? ) или HPI Racing Firebolt 15T 540 Motor ( 22000-26000 об мин ) по идеи чем меньше витков , тем быстрее мотор .
господа, а не пойти ли бы вам другую тему? 😃