Союз меча и орала - свободное обсуждение прототипа

С топологией, будем считать, разобрались. Тонкости оставим на потом.
Помечтал бы еще кто со мной о том, как там и что
Мечтаем дальше. 😃
В радионавигационных системах для увеличения точности применяют специальный алгоритм обработки полученных результатов, основанный на Фильтре Кальмана (ФК). ФК выдает оценки погрешностей на основе заложенной в него априорной информации о поведении погрешностей во времени…
Короче, применение ФК позволяет уменьшить погрешность на порядок. 😃
Может именно это имел ввиду _Sergey_, когда говорил:
Точность определения координат у нас получалась в 10 раз выше разрешения
а может и нет. 😃
А все- таки, господа, чем вас не устраивает система, собранная из готовых (или почти готовых) решений - GPS приемники, барометр, и акселерометр для определения вектора ускорения?
Я тоже могу со своей стороны сказать- что надо поставить 3 моноимпульсных пеленгатора- , (каждый с 3-мя антеннами) на борт- передатчик. Но стоимость и сложность наземной части будет весьма велика. Индивидуальный хронометрист за 2000р в день на каждого участника будет значительно дешевле, даже если имеем по 2-3 соревнования в месяц 😃
что надо поставить 3 моноимпульсных пеленгатора
Моноимпульсные пеленгаторы применяют поворотную антенну. Это действительно очень дорого. 😦
Прежде чем мечтать о ВЧ, давайте определимся какую погрешность нам надо.
Конечно это вопрос философский. Пол метра хватит?
А метр? 😃
Нам хватит +/- 1 метр. Потому, что в F3J например, и полметра будет мало. Но там нет по 10 взлетов-посадок в одном туре, а один раз можно и руками измерить. С F3K-правилами, и металочными габаритами модели, вполне хватит и этой точности. Будет точнее - замечательно. Только на соревнованиях надо организационно решать вопрос о том что первично - “визуально” или “по-прибору”. Без этого никакой точности никогда не хватит.
Сейчас я хочу крупными мазками набросать все подзадачи, кроме организационных (ну чтоб тоску не навевать).
Многие задачи можно, а иногда и нужно решать одновременно.
1a - Содание образца тестового устройства посылки пеленгуемого радиосигнала в LPD или PMR диапазоне
1b - Доработка алгоритма для модуляции посылок с данными телеметрии, первичной из которых является код модели.
2a - Работы по созданию промежуточного автономного устройства для сбора данных от G-сенсора (можно сразу и G и барометр)
2b - Эксперименты по определению моментов взлёта/посадки по данным G-sensora (и возможно барометра)
2c - Формализация алгоритма, для определения взлета/посадки с точностью +/- 0.5 секунды
3a - Создание радиомодуля для размещения на модели (с передачей телеметрии)
3b - Дальнейшие работы по развитию радиомодуля как автономного устройства (подключени др. датчиков и т.п.). Т.е. все работы в направлении автономного использования пары маяк + бытовая радиостанция.
4a - Создание приемника первичного сигнала с выводом отфильтрованного начала/конца импульса на TDC схему.
4б - Создание передатчика и приемника для ретранслируемого сигнала с выходом на TDС схему.
4c - Программирование контроллера “вышки” для измерения времени и выдачи данных о задержке на обычный ПК-ноутбук
4d - Программирование контроллера “вышки” в части демодулятора кода модели и данных телеметрии, с выдачей на ПК-ноутбук
5a - Программирование решения задачи калибрвки и определения 3D координат на судейском ПК по данным, собираемым с вышек (пока по обычной сети).
5b - Развитие судейской программы (определение зон, допусков, интеграция с F3KScore, электронным табло/телевизором и т.п.)
6a - Решение задачи по организации связи “вышка” - судейский ПК
Что я забыл? Или что я неправильно себе представляю?
Половину текста можно понять только прочитав всю тему. Это плохо.
“Формализация алгоритма, для определения взлета/посадки” я бы не привязывал к бортовому оборудованию.
Чем отличается 4д от 6а?
Половину текста можно понять только прочитав всю тему …
…
Чем отличается 4д от 6а?
Я, когда начисто буду переписывать в дневнике, устраню непонятки.
“4с” и “4д” это все работы над вышкой… Т.е. упрощенная система - два приемника, TDC, контроллер для демодуляции телеметрии с кодом модели. И вот эти задачи - программирование этого контроллера и выемка его данных на некий отладочный ноут. Это одна задача.
“6а” это когда рядом с вышкой уже нет ноута, зато к вышке приляпано что-то, что отдает данные на судейский ноут. Я эти задачки разделил, поскольку они принципиально разные. В одной нужно отладить и запрограммировать железо, чтобы точно ловить пикосекунды и выдать данные, хоть по RS232, и далее через USBконвертер в ПК.
В другой задачке - сделать стандартное решение для задачи передачи данных по заданному набору критериев ( стоимость разработки и конечного оборудования, сложность, скорость и дальность передачи данных, энергопотребление и.т.п.).
как там и что модулировать надо
Все очень просто. 😦
Для погрешности 1м, полоса передаваемого сигнала должна быть: скорость света деленная на погрешность = 300МГц. 😃
Даже если учесть “волшебную обработку сигнала”, позволяющую уменьшить погрешность в 10 раз (это очень сложно), нам надо полосу 30МГц.
30МГц на 433МГц замодулировать, конечно, можно… Но этот сигнал забъет не только весь свой диапазон, но и несколько 😦 соседних. Ни кто не даст разрешение на такое устройство и ни кто не даст им пользоваться.
Я не говорю о том, что передатчик придется делать самим.
Можно уходить в более высокие частоты, но это сложно и дорого.
Вывод: Обсуждаемую систему в хобби условиях сделать практически нереально.
Стоп… Точность в 1 метр не имеет никакого отношения к способу модуляции пакетов с данными. Данные могут идти на модулируемой частоте в 1-3 КГц, но это не имеет никакого отношения к погрешности. Назовем эту модуляцию - модуляцией_2. Нам не нужно, прямо в момент начала трансляции определять который из передатчиков вещает. Сперва появилась несущая частота, потом, на этой несущей кратковременно появляется наш сигнал, который называется модуляция_1. Она одинаковая для всех самолетов. Фильтр, для т.н. фазокодоманипулированного сигнала (модуляция_1 для несущей) позволяет выудить конец полезной посылки (еще без кода модели). И там не надо занимать 30 МГц. Ширина занимаемой полосы зависит от того, сколько информации в единицу времени мы хотим передавать. У нас же этой информации 1 бит (есть сигнал или нет его). А предлагаемые 30 МГц - это сотни видеопотоков 😃
В попытке пересказать то, что объясняли мне, я случайно натолкнулся на готовый патент для дециметрового диапазона ru-patent.info/20/60-64/2060513.html
Решил дополнить ссылкой См. о фазовой манипуляции
Там объясняется почему на одну длину волны мы можем передавать более 1 (сейчас, вроде , до 16) бит информации. Нам же, насколько я понимаю, важен в этих битах не код модели, ни данные телеметрии, а уникальный код того, что это НАША передача (от любого из НАШИХ устройств), а не паразитная помеха. Других данных на этом уровне модуляции может вообще не быть. Время, когда приемышы поймут, что это НАШ сигнал будет отличаться именно на разницу хода скорости света до приемыша, с погрешностью не более длины волны. В выбранном дециметровом диапазоне - это то, что надо.
В попытке пересказать то, что объясняли мне, я случайно натолкнулся на готовый патент для дециметрового диапазона ru-patent.info/20/60-64/2060513.html
Мы точно так же можем подать “нашу топологию” на такой же патент. С точно таким же текстом. Типа “Известен способ… Наиболее близким к изобретению является… Сущность изобретения состоит в том, что (…поменяли топологию)… Это позволяет повысить точность…”
Так что, кому нужен ПАТЕНТ - велкам. 😃
Но в этой ссылке говорится о “СВЧ-модуль 6 передатчика”, а это никак не дециметровый диапазон.
Не очень понял ссылку в 106 посте.
Но опять же мухи с котлетами в одной тарелке.
У любого сигнала есть спектр. Ну хоть ты тресни - есть. Есть “ширина” спектра. Для LPD шаг сетки 25кГц. Это и есть максимальная ширина спектра сигнала. Максимальная чсатота сигнала, который мы можем промодулировать - в два раза меньше. И именно про него говорится
на одну длину волны мы можем передавать до 16 bit
- означает, что можно передать 16*25/2=200 килобит/с. Соответственно, каждый бит будет стоять на своем месте с погрешностью 300 000 000/200 000=1500 метров 😃 . Кроме того, я не уверен, что на коленке получится сделать такую модуляцию. Лучше по старинке. Ширина спектра определяет количество передаваемой информации.
Остается только повторить:
Даже если учесть “волшебную обработку сигнала”, позволяющую уменьшить погрешность в 10 раз (это очень сложно), нам надо полосу 30МГц.
30МГц на 433МГц замодулировать, конечно, можно… Но этот сигнал забьет не только весь свой диапазон, но и несколько 😦 соседних. Ни кто не даст разрешение на такое устройство и ни кто не даст им пользоваться.
Я не говорю о том, что передатчик придется делать самим.
Можно уходить в более высокие частоты, но это сложно и дорого.
Вывод: Обсуждаемую систему в хобби условиях сделать практически нереально.
Как бы между прочим, включить несущую “резко” тоже нельзя. Это бесконечный спектр. 😃 Как только мы укладываем спектр в рамки, так погрешность сразу становится очень большой. 😦
Не очень понял ссылку в 106 посте.
Но опять же мухи с котлетами в одной тарелке.
У любого сигнала есть спектр. Ну хоть ты тресни - есть. Есть “ширина” спектра. Для LPD шаг сетки 25кГц.
…
каждый бит будет стоять на своем месте с погрешностью 300 000 000/200 000=1500 метров 😃
Вот-вот мухи с котлетами = Пропускная способность со скоростью распространения сигнала.
- Есть высокочастотная несущая - обычная волна - синусоида
- Есть спектр - т.е. то, на сколько может плыть эта синусоида (период колебаний), чтобы не мешать другим, вещающим на соседних частотах.
О какой погрешности в расположении битов может идти речь, если нету там этих битов. Всё, что есть, это фазомодулированный сигнал
(phase-shift keying (PSK)) — один из видов фазовой модуляции ) в котором фаза НЕСУЩЕЙ СИНУСОИДЫ меняется скачкообразно, так, чтобы в виде кода Грея закодировать фиксированную последовательность из нескольких бит (больше нам не надо)

^^^ здесь PNG изображение из статьи Википедии о PSK
Это скачкообразное изменение несущей доходит до приемников НЕ с разницей во времени, определяемой длиной сообщения (наши несколько бит), а с разницей во времени, определяемой расстоянием. Если два приемника находятся в одной точке, то входные фильтры (не программные, а аппаратные) на нашу последовательсть бит PSK, дадут сигнал с разницей в единицы пикосекунд. Ибо иначе (см. рисунок выше) манипулированная фаза проскочит и нифига вообще не получится. И от длины посылки (в битах) РАЗНОСТЬ во времени обнаружения НАШЕГО КОДА, не зависит.
Сергей, так почему ты считаешь что точность определения расстояния зависит от модулированного сигнала, а не от длины волны несущей?
Пожалуйста, посмотри внимательно, а то у меня возникает ощущение, что я зря каждый год википедию спонсирую 😃
Как ты думаешь, какой спектр у нижнего сигнала на твоей картинке?
БЕСКОНЕЧНЫЙ!
А если его (спектр) обрезать, То если “частота” двоичного кода будет больше половины полосы пропускания, то обратно дешифрировать не получится.
Я сегодня полистал интернет, нашел, что максимальная скорость передачи данных на стандартном оборудовании LPD - 156 кБит/с, а не 200 как я написал.
С другой стороны в твоих мыслях разумное рассуждение есть.
Но что бы наглядно представить, возьми 30 рулонов туалетной бумаги (говорят один 50м), размотай, склей их и нарисуй один период косинусойды. От руки. (у нас присутствуют помехи). И попробуй найти переход через ноль. Возможно с погрешностью в 150 метров это удастся. 😃
Т.е. 30МГц, возможно, перебор. Но 1.5МГц надо.
Это скачкообразное изменение несущей
Напоминаю
Хочу обратить внимание на ещё одну неприятность. Несущая маяка видимо 2,4 ГГц? Это соответствует периоду колебаний, грубо, 400 пикосекунд. Даже при идеальной модуляции\демодуляции время нарастания импульса на выходе передатчика (входе приёмника) будет не меньше 200 пикосекунд. Уровень сигнала на входе приёмника также сильно плавает в зависимости от расстояния модель-приёмники и взаимной ориентации. Значит будет плавать момент срабатывания компараторов, формирующих импульсы для управления микросхемой считающей задержки.
Я рад, что эту тему читают больше друх человек.
To SAN: Прошу заметить, никто не спорил. 😃
Только не пико, а нано.
Это если маяк на мегагерцах, на гигагерцах в пики вылезаем. 😃
To SAN:
Прошу прощения, был пьян. 😃
To SAN: Прошу заметить, никто не спорил.
не спорил. Видимо не заметили 😃
Ну да, приукрасил про единицы пикосекунд… Для 443 МГц нет смысла мерять точнее, чем 2 наносекунды (2257 пс), ибо длина волны 67 сантиметров.
В статье о PSK есть графики с вероятностью ошибки на бит (BER) к соотношению несущая/шум для различных видов PSK модуляции.
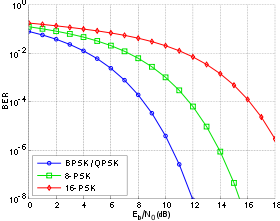
[IMG]http://en.wikipedia.org/wiki/File:PSK_BER_curves.svg[/IMG]график
Т.е. ни туалетная бумага ни учет времени срабатывания компараторов не нужны, если мы оперируем не нашими представлениями “как реализовать фильтр фазокодоманипулированного сигнала”, а конечным устройством. Я не специалист и могу ошибаться, но например чип MC92303 это не то, что необходимо, чтобы обнаружить ФКМ-сигнал? А я всего-то погуглил “qpsk filter”? Подозреваю, что есть и более подходящие микрухи. Модуляторы тоже есть ( вот тут коротенько об одном из )… Сейчас на какой только случай микросхем нет.
Я не хочу спорить в том, в чем я не вполне компетентен. Но если я ошибаюсь и задача не разрешима тем решением, что мы тут напридумывали, то от пробегавщих здесь специалистов хотелось бы аргументированное ПОЧЕМУ.
Например - сейчас не сущевствует микрух обеспечивающих распознование QPSK сигнала и выдающих ответ о приеме “своего” пакета за гарантированное время в погрешностью не более двух наносекунд. Или сейчас нет портативных модуляторов нужного нам сигнала, на нужные нам частоты…
Нам ведь всего-то надо, получить с двух приемышей О_НАЧАЛОСЬ и сравнить время этого о _началось, с точностью 2 наносекунды.
З.Ы.
И я тоже рад, что нас тут по-крайней мере трое 😃
Не осилил, много букв…
Причем половина не русские. Немного тяжело читаль тексты, где идут какие-то сокращения, расшифровку которых я не знаю.
если мы оперируем не нашими представлениями “как реализовать фильтр фазокодоманипулированного сигнала”, а конечным устройством.
Фильтр тут ни причем. Я уже два раза писал, что задачу можно решить увеличив спектр передаваемого сигнала. Давай забьем своим сигналом насколько диапазонов или уйдем на первый телевизионный дециметровый канал и займем его. Но на модель надо будет ставить нестандартное оборудование.