FrSky Taranis - Максимум возможностей за минимальные деньги.

это не то.рабочая частота цифрового сервопривода 330 Гц аналогово 50Гц
добрый вечер .подскажите.как изменить рабочею чистоту сервоприводов на аппе. прошивка 2.3.15
А это не в приемнике настраивается?
Например у приемника G-RX8 есть настройка двух скоростей работы машинок:
Servo frame rate: 9ms (HS–High Speed Mode) / 18ms (FS–Normal Speed Mode)
Настраивается путем замыкания каналов 5 и 6 при привязке
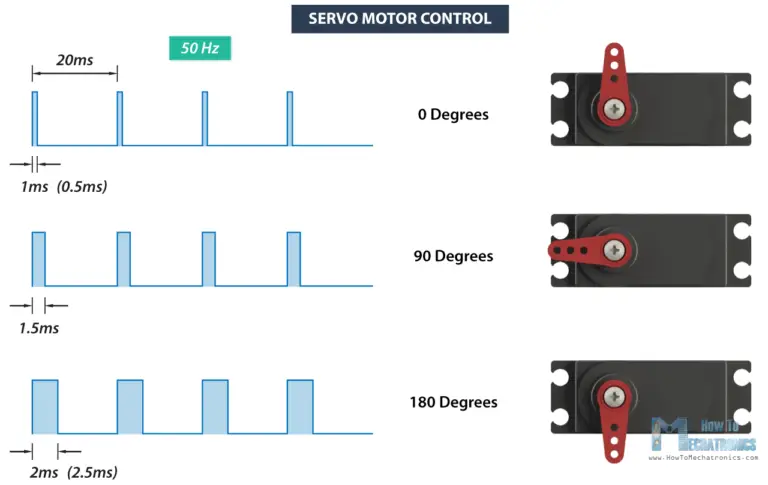
Как управляется сервопривод[править] Положение сервопривода определяется длиной передаваемого на него импульса. Частота подачи импульсов зависит от типа сервомеханизма:
Аналоговые сервоприводы - 50 Гц (20 мс) цифровые сервоприводы - 200 Гц (5 мс) Servo diagram.jpg
Положение сервопривода определяется длиной импульса. Длительность импульса для нулевого положения 1500 мс. Нижний и верхний пределы получаются путем прибавления/вычитания следующих значений:
100% - 512 мкс 125% - 640 мкс (расширенные лимиты.) Эта информация полезна при настройке некоторых устройств, которые требуют для переключения сигнал с определенной длительностью импульса (автопилоты, системы стабилизации и пр.).
Меню лимиты[править] В заисимости от аппаратуры это меню называется
Limits - Turnigy Outputs - OpenTX Taranis старые версии Servos - OpenTX Taranis новые версии Лимиты работают на выходах каналов. Параметры, настраиваемые в этом меню, действуют на выхо
, действуют на выходные каналы. В этом меню Вы можете настроить центральные точки (subTrim – субтриммеры), конечные точки (слева и справа) и инвертировать выходные значения каналов.
Каждый канал здесь соответствует каналу в приемнике. Устанавливаемые параметры действуют только на соответствующий канал
Строки в этом меню имеют такой вид:
Turnigy er9x Turnigy OpenTX Taranis Turnigy-er9x-Limits.jpg Turnigy Servos.jpg Taranis Servos.jpg
Теперь я совсем не понимаю о чём вы спрашиваете, сформулируйте вопрос чтоб Вас поняли. Катинок Ваших не видно.
Я спрашивал именно об этом. Сам нашёл ответ и решил поделиться. Может кому-нибудь пригодится. Почему не скопировались картинки не знаю. Вопро закрыт.
Немного запутался в частоте импульсов и в продолжительности импульсов. Если правильно понимаю, то Min/Max лимиты это как раз продолжительность импульса, что для сервы характеризуется углом поворота качалки. А как тогда дать понять передатчику/приемнику что он работает с цифровой сервой на соответствующем канале?
Передатчику фиолетово и приемнику собственно говоря тоже )).
Немного запутался в частоте импульсов и в продолжительности импульсов.
Радио управление работает так: (кто в этом понимает поправьте 😄)
из приемника выходит сигнал разной продолжительности ( от 1 мс до 2 мс) каждые 20 мс (50 гц). Некоторые приемники можно включить так чтобы они посылали сигнал на серво не каждые 20 мс , а каждые 10 мс (100 гц).
1 мс это 1000 наносекунд - нулевое положение сервопривода
1,5 мс это 1500 наносекунд - середина
2 мс это 2000 наносекунд - максимальное отклонение
Приёмник не знает какое серво к нему подключено. Никакой цифровой сигнал не выходит из приемника.
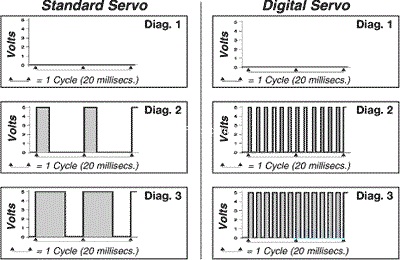
Отличие аналоговой серво от цифровой только в частоте импульсов приходящих на мотор.
Электроника в аналоговом серво посылает импульсы на мотор серво каждые 10 мс. Чем больше расхождение желаемого положения от реального тем продолжительнее эти импульсы.
В цифровом серво эти импульсы на мотор могут посылаться каждые 2,5 мс. Судя по видео эти импульсы состоят из множества импульсов частотой 19000 герц.
Спасибо! все максимально ясно и понятно изложено.
Осталось понять, с какой целью. Есть длительность импульса, есть его период,
Длительность импульса ОДИНАКОВАЯ для всех типов сервоприводов.
Исключение только сервоприводы для управления шагом хвостового ротора р/у вертолетов
(на современных вертушках).
Аналоговые и цифровые сервы отличаются обработкой внутри сервы, им фиолетово на источник PWM.
В аналоговых сервах аналоговый компаратор, в цифровых микроконтроллер.
FrSky Taranis - Максимум возможностей за минимальные деньги. #18246
эта картинка
не имеет отношения к PWM, судя по всему товарищ снимает осциллограмму с моторчика.
эта картинка
не имеет отношения к PWM, судя по всему товарищ снимает осциллограмму с моторчика.
Да, на этой картинке сигнал на моторчик. На втором видео видно что он припаялся к нему и получил что то похожее на это.
разница между аналоговым и цифровым сервоприводами только в минимальном периоде PWM,
который она в состоянии переварить.
как правило аналоговые сервоприводы с трудом или совсем не переносят HS режим приемника.
у Futaba и FrSky это, чаще всего, период 7 мс, ну или частоту PWM чуть больше 140 КГц.
Сори,140 Гц естественно ), Т9 тупит