Arduino для BAIT BOAT...

На ремоте поставить скорость 38400, либо в миссионеров планёре поменять на 57 и должно наступить счастье 😃
А что такое освд?
А что такое освд?
apmcopter.ru/…/minimosd-proshivka-nastroyka-podkly… – там же… нету толку… не танцы с бубном ПО замена модемов… осталось смерится… брак АРМ-2.7?
РАЗОБРАЛ, посмотрел… АРМ как АРМ.
Апм у тебя живой
Светик же мигает в пол накала
Нада осцилографом посмотреть,если нету то звуковая карта с компа тоже сойдёт, погугли.
Я думаю OSD отключить нада
Я сделал так, паралельно телеметрии прицепил ардино нано и уже она расшифровывает протокол мавлик, и с нее взял выходы на светики и сервы для открытия люков и сброса снастей
А что мешало использовать возможности уже заложенные в АРМ?
Там же можно каналы, не используемые непосредственно для управления Ровером (т.е. кроме 1,3), задействовать для управления своими устройствами.
, и она же следит за акб и преключает на резервный акб когда нада.
А почему сразу оба в параллель не включить?
Меньше на них нагрузка по току будет.
И опять же есть встроенные функции контроля как по напряжению АКБ, так и по расходу энергии.
Там же можно каналы, не используемые непосредственно для управления Ровером (т.е. кроме 1,3), задействовать для управления своими устройствами.
- а можно по конкретней. как управлять без телеметрии для завоза в точку в авто режиме .(
 аппа 6 канальная… ( Flysky FS-CT6B-) у меня два двигателя, управление правым джойстиком.
аппа 6 канальная… ( Flysky FS-CT6B-) у меня два двигателя, управление правым джойстиком.
Я подключил заведомо рабочие модемы с квадрика, на обеих модемах подключенный к АРМ - красный светодиод мигает в пол накала.
как управлять без телеметрии для завоза в точку в авто режиме
Уточните, что Вы называете “без телеметрии”?
Если без этих модулей

, то сначала подключаетесь шнурком к GCS, вводите координаты точки сброса и после координат точки добавляете строку с командой DO_SET_SERVO с номером канала серво и длительностью импульса, соответствующей открытому положению. В примере ниже управление серво 10-го канала, в ППМ1 - 1700мс, в ППМ3 -1900мс, ППМ5 - опять 1700мс.
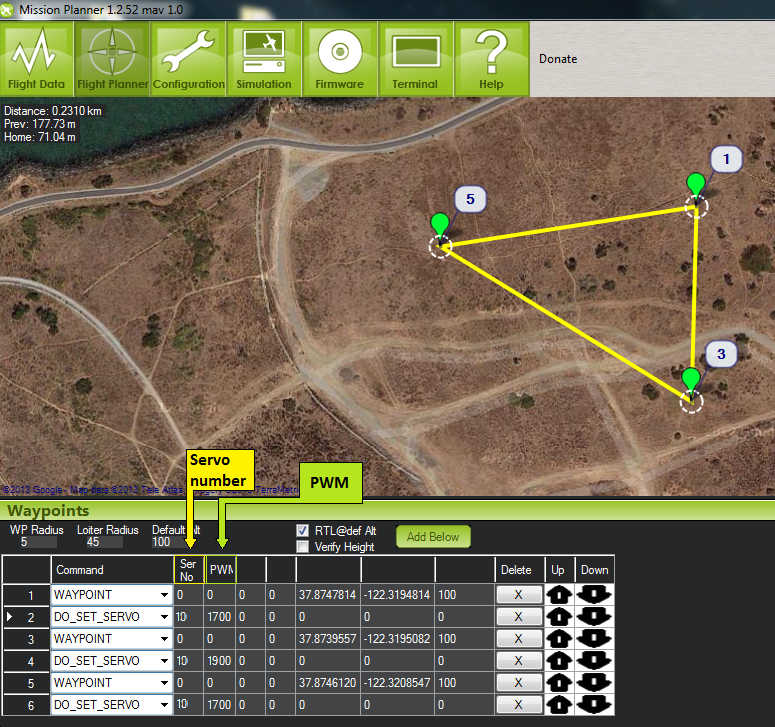
Если надо открыть/закрыть удобно использовать DO_REPEAT_SERVO

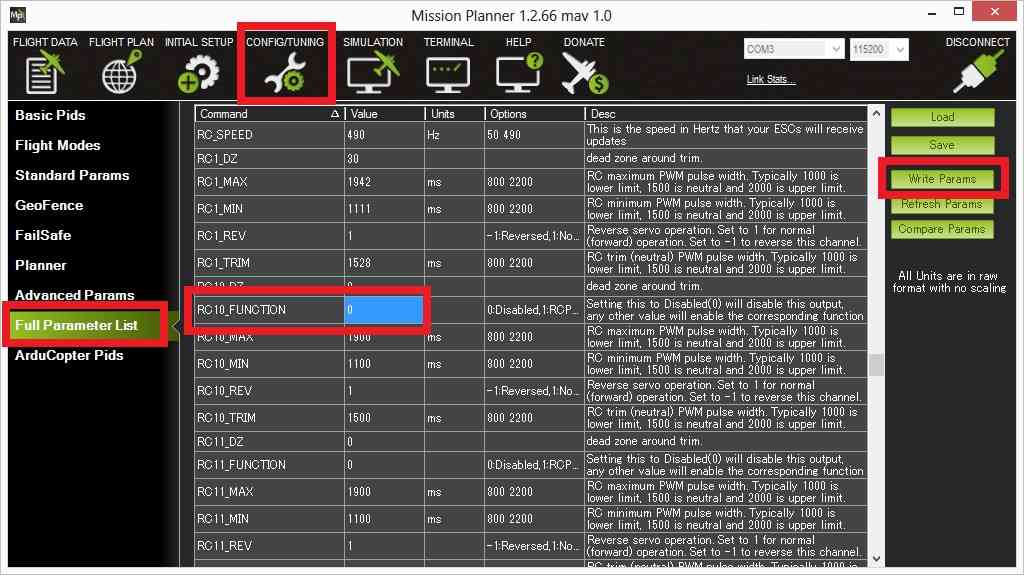
В этом случае указывается открытое положение серво, кол-во срабатываний и длительность паузы. Закрытое положение серво заранее указывается в таблице параметров в строке RCn_TRIM. Так же в таблице параметров надо выделенному серво установить параметр RCn_FUNCTION=0
После ввода маршрута, сохраняете его в АРМ, отстыковываете шнурок, отправляете кораблик в плавание и включаете режим АВТО.
Спасибо, будем пробовать…
Проблема с телеметрией, а именно с модемом на АРМ, решилась… подачей +5V отдельно – на модем. Причина такого поведения мне не понятна…
Поделюсь достижением. Так как с автопилотом пока расслабился, решил запустить на 100% програмулину “Boating Navionics”. Это картплоттер. Ей нужен сигнал ЖПС и сонар. ЖПС взял с АПМ, но перевел на 9600 и через телеметрию 433мГц как радиомодем на берег. На базе с модема в блютуз и на планшет. Там обычная прога BluetoothGPS передает данные навиониксу. Сонар (эхолот) у меня Вексиларовский. Удлиннен также через телеметрию только на 115000 и на 915мГц. Навионикс работает с Вексиларом на прямую. Когда все подключено я на экране вижу свой кораблик на водоеме, а внизу экрана показания эхолота. В режиме записи трека прога создает и сохраняет карту глубины водоема. Проверял пилотный вариант на дальность – гдето 150-180 метров. Без экранов, на проводочках. Переделаю красиво сниму видео.
. Переделаю красиво сниму видео.
Очень, хотелось бы посмотреть… Пока для меня это сложно, - но, к этому я и стремлюсь. Видеть на экране не только глубину в цифрах, но и рельеф дна.
Сонар (эхолот) у меня Вексиларовский
Он же Wifi , покажите внутрености датчика )))
www.raymarine.com/view/?id=11201 хочу такой, также переделать
Он же Wifi , покажите внутрености датчика )))
www.raymarine.com/view/?id=11201 хочу такой, также переделать
Я между платой и вайфаем радио модем втюхал. Сама плата вайфая на берегу, поэтому связь с планшетом всегда 100%.
фото пожалуста
Фото
Кстати есть 2 сумки под такой кораблик. Если надо в ЛС
www.youtube.com/playlist?list=PLr0Qfve4sjkrvZ3zh3s…
Подскажите как правильно подключить и настроить передатчик turnigy 9x для запоминания точек с передатчика и что нужно выставить в Mission Planner. Заранее спасибо!
В общем заказал APM 2.6 и GPS N8M как приедет, буду мудрить, кораблики у меня все одномоторные, руль серва, думаю проблем не должно быть, хотя все может быть, отпишусь что получится как приедет.
Подскажите почему когда на передатчике включаю режим “авто” то в МР показывает режим"HOLD"
Да потому что мисия не загружена в автопилот