EasyToTrack - DIY универсальная наземка, повортка, телеметрия

ну, значит скорость выставилась. Попробуйте на сендер выделить отдельный порт (можно вместо приеника например, для теста). Может он шарится с USB не хочет. Я несколько раз запускал такую связку - все работало.
ну, значит скорость выставилась. Попробуйте на сендер выделить отдельный порт (можно вместо приеника например, для теста). Может он шарится с USB не хочет. Я несколько раз запускал такую связку - все работало.
Отдельный порт итак, не уарт1 который с УСБ расшарен.
Добрый день!
Подскажите, а возможно вместо серво-моторов использовать шаговые моторы (NEMA17). Спрашиваю, потому, что есть поворотное устройство от inmarsat-c.
Хочется на его основе повторить проект…
Я думаю если сделать типа регуляторов хода на каждый шаговик. Принимать серво импульс, а у управлять шаговиком от него.
Антенна вот такая у меня
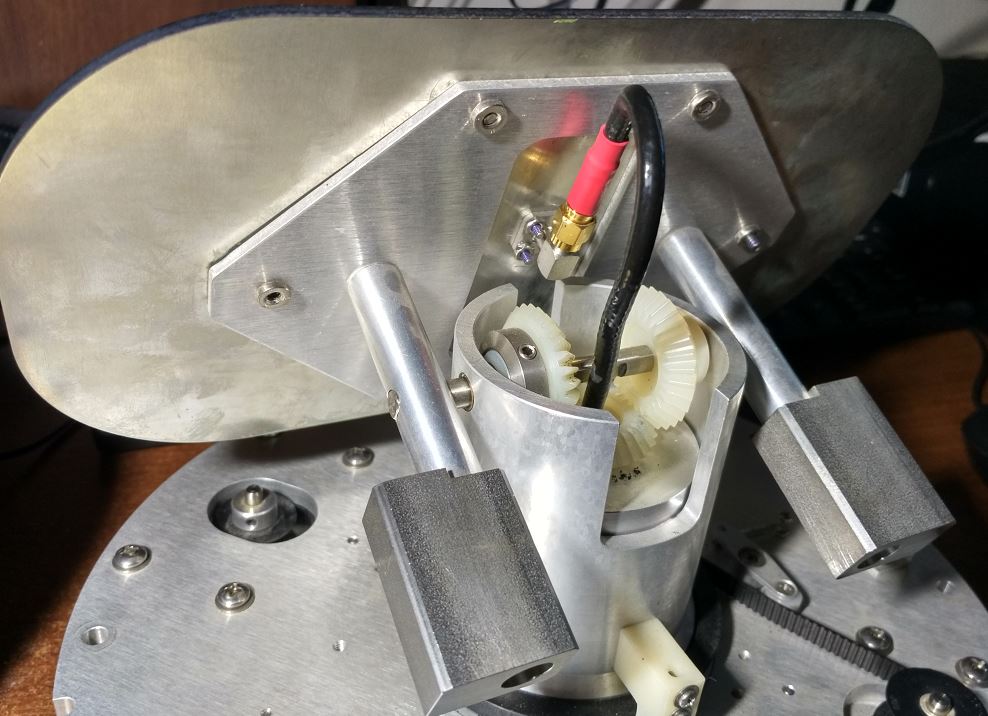
Хотелось бы на базе этой повороти и повторить этот проект.
“Выдирать” от туда шаговые двигатели не хочется, может кто встречал “конвертер” который бы конвертировал управляющие сигналы для сервы в сигналы управления для шагового двигателя.
может кто встречал “конвертер” который бы конвертировал управляющие сигналы для сервы в сигналы управления для шагового двигателя.
Я нет. Только самому разработать и сделать.
А ссылку где продается?
А пардон, можно сделать самому… ) www.cunningturtle.com/wiki/index.php?title=Radio_C…
Спасибо за ссылки. Что-то подобное я и искал.
Получается, при помощи этой платы можно управлять шаговыми двигателями в повороте использую EasyToTrack?
Еще вопрос. У меня шаговый двигатель с “поворотной рамой” соединен через ременную передачу, как в таком случае контроллер будет поворачивать антенну на правильный угол?
Спасибо

Получается, при помощи этой платы можно управлять шаговыми двигателями в повороте использую EasyToTrack?
Логично что да.
Только настроить её так, что бы шаговый двигатель, общий расход делал 180 градусов. Или расходами подобрать.
На видео там он делает больше 180. Там внутри проекта есть файли по настройке платы.
В общем разбираться нужно. Проект годный.
Еще вопрос. У меня шаговый двигатель с “поворотной рамой” соединен через ременную передачу, как в таком случае контроллер будет поворачивать антенну на правильный угол?
Вот! Ответ на это вопрос выше. Настроить плату таким образом что бы количество оборотов шаговика, было такое, что бы антенна поворачивалась на 180 град. То есть учесть передаточное число ременной передачи.
Нужно добиться что бы 180 градусов по азимуту и 180 по елевации. И будет охватывать всю полусферу.
ubd
Спасибо Вам за пояснения.
Я планирую повороту использовать только по азимуту. Поворачивать она будет только панельную антенну.
По элевации крутить не буду, так как хочу использовать “диверсити” приёмник, к которому будет подключена панельная антенна на поворотке и неподвижная всенаправленная антенна (клевер, пагода). Итого в ближней зоне будет принимать всенаправленная а при удалении коптера уже прием будет на панельную антенну
Мне кажется по такой схеме КПД всей системы будет лучше, так как в ближней зоне нет смысла в использовании панельной антенны, да и поворотка может не успевать доворачивать анетнну. тут лучше справится всенаправленная антенна… а при удалении коптера уже сигнал будет больше на панельной антенне и диверсии приемник переключится на нее.
Диверсити приемник у меня собран не по классической схеме с контролем RSSI а по контролю качества видео. вот тема по этому приемнику:
fpv-community.de/…/diversity-mit-videoqualität-sta…
Я планирую повороту использовать только по азимуту. Поворачивать она будет только панельную антенну.
По элевации крутить не буду,
Не получится. Тогда в проекте наземки нужно менять логику работы антенны.
Именно она будет направляться на самолет только если азимут и элевация будут по 180 град.
Возможно в новой версии наземки и добавили возможность работы с поворотками у которых азимут 360 град. Не знаю.
А я логику не затрону. на мотор элевации не буду подавать управляющие сигналы. Вместо него у меня в дальней зоне будет работать “вертикальная диаграмма направленности панельной антенны” (антенну установлю на фиксированный угол в 45 градусов)
типа такой
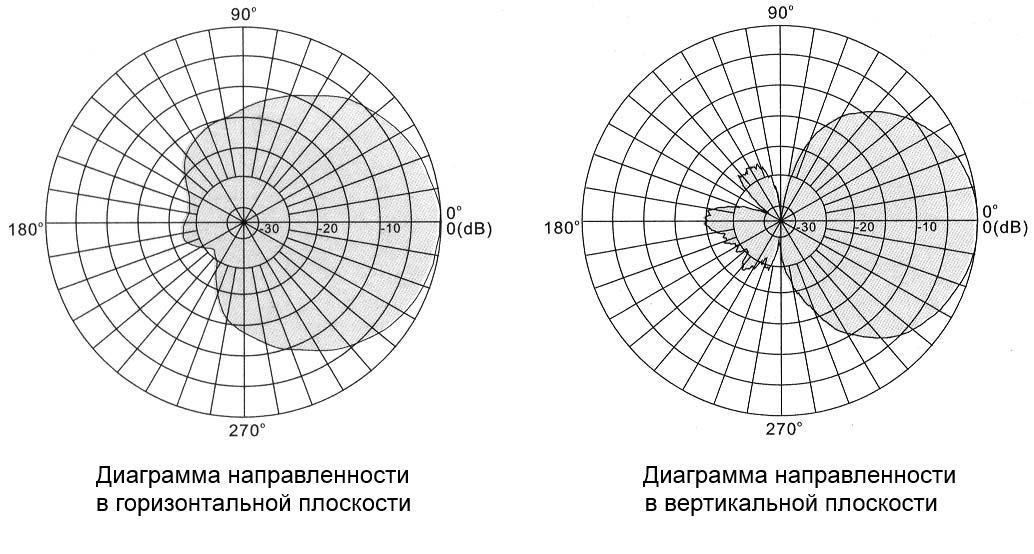
А в ближней зоне уже панельная антенна будет не эффективна по вертикали, но из за того, что я использую диверсити приемник, он переключится на всенаправленную антенну, которая и компенсирует своей диаграммой оптимальный прием. (а панельная антенна пусть крутится)
Без диверсити приемника, конечно, это все бы не работало.
Не верно понимаете работу прошивки наземки. Она думает что у вас антенна поворачивается на 180 град, а реально будет на 360.
Нужно что бы прошивка наземки работала в режиме 360 по горизонту.
Я не знаю добавили это или нет. Константин вроде много изменений делал в прошивке наземки. Может и добавили режим 360 градусов по азимуту.
упустил этот момент… сейчас перечитаю описание работы… Я что-то подумал, что если буду использовать серву (шаговый двигатель с доработкой) на 360 градусов то и крутится он будет на 360
Да будет крутиться на 360, но наземка будет думать что 180.
Посмотрел в приложении для Андройд (версия 2.2) есть там возможность настроить вращение на 360 градусов по азимуту. Так что буду заказывать печатные платы у китацйев и попробую повторить проект с использованием шаговых двигателей
Тогда хорошо.
Доброго дня! у кого нибудь есть гербер-файл для EasyToTrack Sender?
большая просьба прислать на почту uvars#mail.ru. Спасибо
Доброго дня! у кого нибудь есть гербер-файл для EasyToTrack Sender?
большая просьба прислать на почту uvars#mail.ru. Спасибо
drive.google.com/…/0B4njKGFSQZO1NjdDU2dEQVJQVUU?us…
Но там неразбериха: герберы одной версии, монтажная схема с описанием - другой. Кароче я до сих пор не смог заставить сендер видеть данные с полетника, все перепробовал что могу, не видит и все. Знал бы что так будет не стал бы столько средств и времени тратить на данный проект. Не стоит он того.
Доброго дня! у кого нибудь есть гербер-файл для EasyToTrack Sender?
большая просьба прислать на почту uvars#mail.ru. Спасибо
Вот прямая ссылка на герберы для EasyToTrack Sender V2
drive.google.com/open?id=1oKXF1oW5ppsnj5Xm-mAY4k_n…
На гуглдрайве почистил. Старое удалил, релевантные файлы добавил.
Но там неразбериха: герберы одной версии, монтажная схема с описанием - другой. Кароче я до сих пор не смог заставить сендер видеть данные с полетника, все перепробовал что могу, не видит и все. Знал бы что так будет не стал бы столько средств и времени тратить на данный проект. Не стоит он того.
Можно взглянуть на объем и разносторонность выложенного проекта и сделать скидку на присутсвие неточностей. При том что денег никто не просит. Занят в проекте один человек. Кто кодит, тот и доки пишет, тестирует - утопия. Помогать некому (за редким исключением), всем только готовое и 100% рабочее от одного пука подавай. Вместо высказывания своего фи, больше конструктива. Стукнуть в личку или на почту, написать что не получается найти гербер, кому от этого хуже будет?
По теме. Какая версия INAV?, Какой полетный контроллер, куда подключен UART сендера, можно ссылку на дамп настроек INAV.