Автопилот Arduplane - открытое ПО

Спасибо, это я в курсе ещё со времён АРМ.
О, а подскажите ещё:
были раньше статусные светодиоды для АРМ, но их поддержка прекратилась ещё до версии 3.4.0
Откопал у себя такую штуку: www.amazon.com/…/B00U4XZPP8
Их так и нельзя прицепить?
И если можно то как это сделать с платой Omnibus F4 pro V3?
Я статус снимаю ардуиной через чтение МавЛинка. Иначе никак.
Их так и нельзя прицепить?
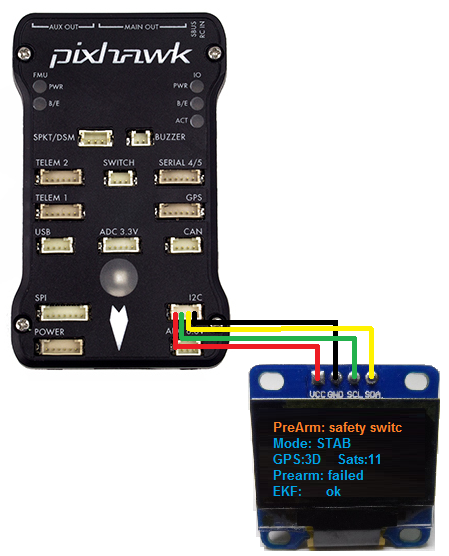
светодиодный семафор - стало крайне не информативно для современных прошивок. появилась масса предполетных проверок в частности число спутников достаточно ли, контроль вольтажа батареи, адекватность компаса и масса других сообщений.
для этого всего в i2c можно воткнуть и настроить компактный легкий и достаточно дешевый олед дисплей
У всех при перепрошивке и восстановления настроек из сохранённого файла корректно восстанавливается только первый экран OSD?
Перешивался на 4.0.0 и была такая проблема, сегодня перешился на 4.0.1 и то-же самое.
И настройки RSSI не подтянулись… 😦
У всех при перепрошивке и восстановления настроек из сохранённого файла корректно восстанавливается только первый экран OSD?
Перешивался на 4.0.0 и была такая проблема, сегодня перешился на 4.0.1 и то-же самое.
И настройки RSSI не подтянулись… 😦
У меня телеметрия перестала работать (поковыряю еще). Пришлось откатываться на 3,9
Можно ли подключить внешний датчик температуры с отображением на ОСД?
Кому удалось побороть воблинг?
Заметил, что чем больше вес, тем больше модель мандрагонит. При этом трясучка может пропадать когда летишь в повороте, или по ветру.
При занижении P на треть (как советуют) - осцилляции остаются, но становятся более медленными и амплитудными. Другие параметры (I и D) на решение вопроса не заметил, чтобы влияли в лучшую сторону. Может, конечно, что-то недокрутил…
С центровкой тоже играл, сервы пробовал разные, и медленные и быстрые.
Подскажите, куда копать? Это ведь стандартный ПИД-регулятор, тогда почему с Inav так различается результат?
Три борта, от 1.1метра до 2 метров, 1.3 кг. до 7.3 кг.
Чем больше, тем стабильнее. Автопилот АПМ.
Автотюн прошел успешно?
зажать расходы для начала
автотюнить в штиль…
зажать расходы для начала
Какой параметр имеете в виду под расходами? Если вы про пульт, то он тут не причем, крыло воблит при отпущенных стиках пульта. Все настройки делаю в автопилоте.
Автотюнил и так и сяк, и по ветру и против него и без ветра. Правда вот сейчас понял, что все автотюны были долгими, по несколько пролётов, и в общей сложности штук по 60 итераций стиком. Возможно надо было 20 раз его качнуть вверх-вниз, как советуют, и все. Возмжно после долгих автотюнов он даёт более агрессивные параметры.
Но речь уже не об автотюне. Хочется пнять, в какую сторону двигать пиды, чтобы модель летела стабильно (а их всего 3, т.к. проблема только по Pitch).
Три борта, от 1.1метра до 2 метров, 1.3 кг. до 7.3 кг.
Чем больше, тем стабильнее. Автопилот АПМ.
Да, это я как раз про мелкие крылья, ZOHD (900) и Reptilie S800, примерно того же размера. Всё, что от метра конечно стабильней, но его в рюкзак не засунешь) Вон GoDiscover (1600) у меня идёт как крейсер, и нет даже намёка на воблинг.
Да, автопилот был и APM и Pix. Суть одна: Ardupilot
Играться нужно с тремя параметрами обычно если воблинг есть. По крайней мере я убрал почти у себя, хотя крылья к этому склонны(особенно небольшие). Параметры эти вот RLL2SRV_P
PTCH2SRV_P
NAVL1_PERIOD
Первый отвечает за элероны, второй за РВ, а третий за агрессивность управления. Исходя из того, что воблинг, то второй пареметр уменьшать и играть третьим.
Примерные значения их для определенных типов самолетов тут ardupilot.org/…/configuration-files-for-common-air…
APM выкиньте, он уже некорректно поддерживается MP. С Пиксом проблем быть не должно, если не мороз только.
Спасибо, повторили то что тут каждый знает 😃
АРМ не некорректно поддерживается а вообще не поддерживается в прошивках старше 3.4.0
Но тем не менее летает АРМ весьма достойно.
Первый отвечает за элероны, второй за РВ, а третий за агрессивность управления. Исходя из того, что воблинг, то второй пареметр уменьшать и играть третьим.
Интересно, попробую. Всегда думал, что это NAVL1_PERIOD - это интенсивность поворотов в авторежимах.
NAVL1_PERIOD
Если по простому то это точность следования маршруту(допустимые отклонения , когда АП начнет поправлять курс).
В стабилизации он вообще играть не должен. Работает в авторежиме и в режимах с курсом (круиз )
У меня воблинг появляляся когда элевоны были большей площади при одинаковых размерах ЛА. (т е остальные значения были одинаковые примерно) Уменьшал значения 3 параметров сразу. Не всегда прямопропорционально, но пропадал воблинг.
Интересно, попробую. Всегда думал, что это NAVL1_PERIOD - это интенсивность поворотов в авторежимах.
Вот что пишет сам Ардупилот
NAVL1_PERIOD: L1 control period¶
Period in seconds of L1 tracking loop. This parameter is the primary control for agressiveness of turns in auto mode. This needs to be larger for less responsive airframes. The default of 20 is quite conservative, but for most RC aircraft will lead to reasonable flight. For smaller more agile aircraft a value closer to 15 is appropriate, or even as low as 10 for some very agile aircraft. When tuning, change this value in small increments, as a value that is much too small (say 5 or 10 below the right value) can lead to very radical turns, and a risk of stalling.
Т е для юрких самолетиков он должен быть меньше, но не менее 10. Для медленных около 20. Меньше 10 может привести к сваливанию. Я так понимаю, что имеется в виду повороты по ВСЕМ осям, а не только по горизонту.
Спасибо, повторили то что тут каждый знает 😃
АРМ не некорректно поддерживается а вообще не поддерживается в прошивках старше 3.4.0
Но тем не менее летает АРМ весьма достойно.
Я не говорил что он плохо летает. Но с его настройкой сейчас возникнут проблемы. Т к некотрые параметры давно переименованы , исключены, добавлены . MP вообще иногда хрен сохраняет их.
Я так понимаю, что имеется в виду повороты по ВСЕМ осям
параметр влияет не на повороты по осям. он определяет интенсивность запуска процедуры расчета “навигации”
в управлении самолетом три основных процесса
-
стабилизация достижение требуемых положений, углов и угловых ускорений по всем осям в пространстве. у стабилизации есть входные целевые значения определяемые либо системой навигации либо положением стиков
-
навигация расчет и задание целевых углов для системы стабилизации в автоматических режимах, в полуавтоматических режимах стаб, фбв, круиз целевые значения для системы стабилизации формируются со стиков
-
расчет требуемой энергии винта (в авто режимах)
Т е для юрких самолетиков он должен быть меньше, но не менее 10. Для медленных около 20. Меньше 10 может привести к сваливанию. Я так понимаю, что имеется в виду повороты по ВСЕМ осям, а не только по горизонту.
Да, я перевёл в своё время это как “может привести к разрушению” , и воспринял как повод занизить значение, т.к. мой самоль из EPP не развелится точно, зато будет бодрее маневрировать))
NAVL1_PERIOD
Если по простому то это точность следования маршруту(допустимые отклонения , когда АП начнет поправлять курс).
В стабилизации он вообще играть не должен. Работает в авторежиме и в режимах с курсом (круиз )
Да, вот это конечно интересно, но я на всякий случай выставил NAVL1_PERIOD в дефолт перед грядущим очередным автотюном. Вот кто б ещё точно знал, влияет ли оно на автотюн? На то, что влияет, как-бы намекают в одной из инструкцй (не помню уже в какой) , где советуют задавать NAVL1_PERIOD уже после автотюна.
параметр влияет не на повороты по осям. он определяет интенсивность запуска процедуры расчета “навигации”
в управлении самолетом три основных процесса
стабилизация достижение требуемых положений, углов и угловых ускорений по всем осям в пространстве. у стабилизации есть входные целевые значения определяемые либо системой навигации либо положением стиков
навигация расчет и задание целевых углов для системы стабилизации в автоматических режимах, в полуавтоматических режимах стаб, фбв, круиз целевые значения для системы стабилизации формируются со стиков
расчет требуемой энергии винта (в авто режимах)
Ага, то есть получается, не влияет, раз целевые значения со стиков… А автотюн у нас на базе стаба же или FBWA.
Я на облете вообще нав л1 ставлю 35. Потом когда самолет настроен, начинаю гонять в авторежиме и уменьшаю его до уровня когда идет по маршруту более менее ровно(ошибка икс трек- небольшая), но если перекрутить то он очень резкий становится по навигации. Только от маршрута отклонился - сразу углы рули до упора, чтобы на курс вернуться и получаем “плетение”(долго понимал что это такое на оф сайте пока не увидел)), в точку может попадать с 10 раза и по прямой идет зигзагами.)
параметр влияет не на повороты по осям. он определяет интенсивность запуска процедуры расчета “навигации”
в управлении самолетом три основных процесса
стабилизация достижение требуемых положений, углов и угловых ускорений по всем осям в пространстве. у стабилизации есть входные целевые значения определяемые либо системой навигации либо положением стиков
навигация расчет и задание целевых углов для системы стабилизации в автоматических режимах, в полуавтоматических режимах стаб, фбв, круиз целевые значения для системы стабилизации формируются со стиков
расчет требуемой энергии винта (в авто режимах)
Я это и имел в виду, просты варазился не совсем так. Но теперь ясность полная.
Я на облете вообще нав л1 ставлю 35. Потом когда самолет настроен, начинаю гонять в авторежиме и уменьшаю его до уровня когда идет по маршруту более менее ровно(ошибка икс трек- небольшая), но если перекрутить то он очень резкий становится по навигации. Только от маршрута отклонился - сразу углы рули до упора, чтобы на курс вернуться и получаем “плетение”(долго понимал что это такое на оф сайте пока не увидел)), в точку может попадать с 10 раза и по прямой идет зигзагами.)
Еще ровер не настраивали. Там это прямо сразу видно!
добрый день. столкнулся с непонятной для меня ситуацией. Имею матек 405 ctr с arduplane 4.0.1. Проблема заключается в том,что поисковый маяк tbeacon amber категорически не видит координаты жпс. Перестявляю маяк на аналогичный сетап но с Inav на борту,маяк работает как положено и видит координаты от жпс. Третий день уже бьюсь((
del
Прошивка в маяке последняя (0.58) и маяк подключаете напрямую к GPS?