Автопилот Arduplane - открытое ПО

так вроде удалили код поддержки светодиодов из прошивки для атмеги, еще с версии 3.1
То есть работать не будет? Я тоже приобрел, но пока не пробовал подключать.
Нет, только со старой прошивкой или новой ардуиной. 😃))
У меня на боковой выведены 10 и 11. Вывести именно 9-ый канал на АПМ не получится ни на какие гребенки.
Здравствуйте! Надоумте, пожалуйста, на каких пинах искать 10 и 11 каналы? И нужны ли для них цифровые сервы (любые другие, кроме обычных аналоговых)? Хочу поворот камеры сделать, приемник с PPM, в АРМ втыкаю. Восемь каналов есть, а для крутилок 10 и 11 не знаю где взять. Спасибо!
Здравствуйте! Надоумте, пожалуйста, на каких пинах искать 10 и 11 каналы? И нужны ли для них цифровые сервы (любые другие, кроме обычных аналоговых)? Хочу поворот камеры сделать, приемник с PPM, в АРМ втыкаю. Восемь каналов есть, а для крутилок 10 и 11 не знаю где взять. Спасибо!
На боковых выводах А10 и А11, но их необходимо включить в настройках.
Сервы обычные аналоговые.
На боковых выводах А10 и А11, но их необходимо включить в настройках.
Сервы обычные аналоговые.
А в настройках какой параметр необходимо включить? RC10_OPTION?
На сколько помню, да, я ставил в 1.
На сколько помню, да, я ставил в 1.
Спасибо! Буду пробовать!
Что-то не работает. Параметр в 1 выставил, серву подключил. Крутилку круячу - ничего не происходит.
Скажите, а в Mission Planer’е в Flight Data, на вкладке Actions при нажатии кнопки Raw Sensor View сколько каналов должно отображаться? У меня только восемь, хотя приемник на 12 каналов.
Какая прошивка? Вот тут выкладывали прошивку с 11 каналами.
rcopen.com/forum/f90/topic132831/6283
еще
rcopen.com/forum/f90/topic132831/6292
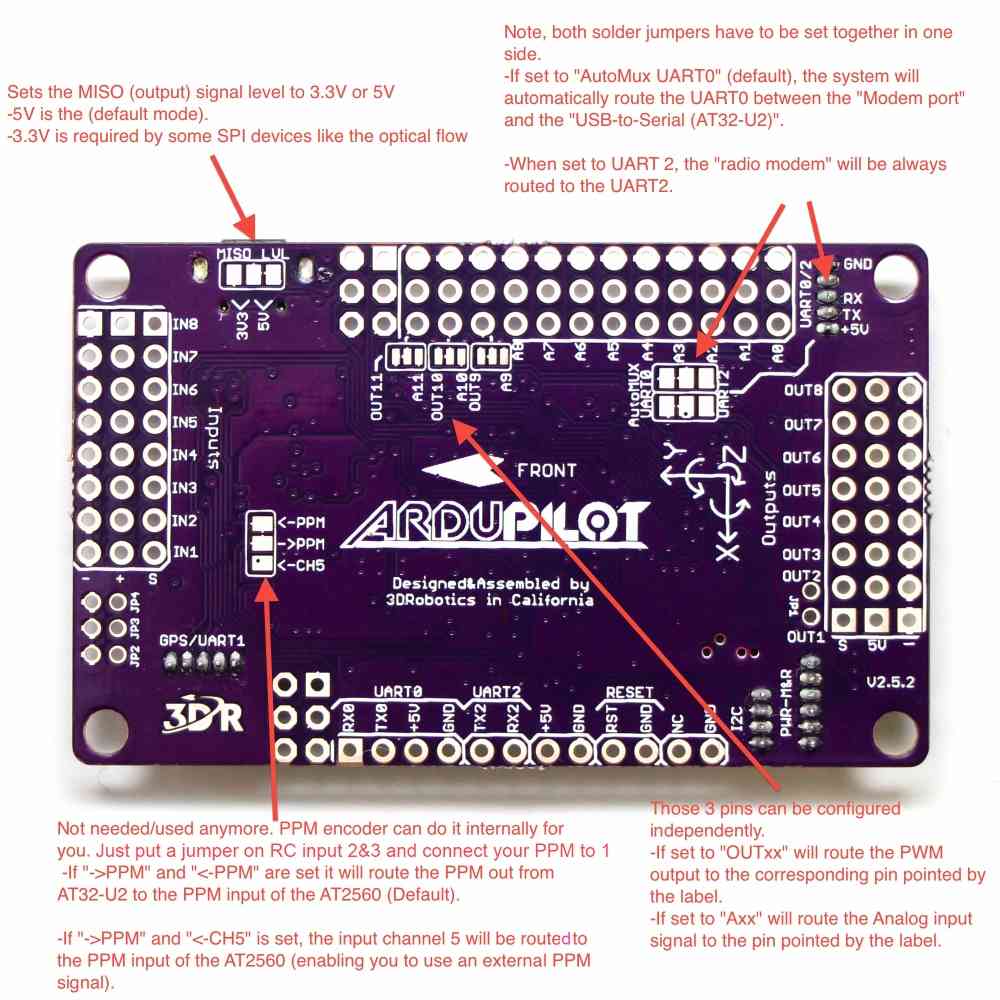
и еще (выше выложили картинку про перемычки, с помощью них переключаете 10 и 11 пины боковой гребенки на разные режимы - аналоговый вход или выход для серв)
rcopen.com/forum/f90/topic132831/6296
У меня только восемь, хотя приемник на 12 каналов.
Там так и будет 8.
Разобрал свой АРМ. Перемычек не вижу. Прикладываю фото АРМа, подскажите куда копать.
Раз уж влез в разборки пришлось разобрать завалы и собрать APM. Плата оказалась в точности как у тебя. Загрузил Mission Planner и в поле RC10_Function поменял 0 на 1. Серва, висящая на 10 канале боковой гребенки тут же заработала. На передатчике естественно настроен вывод 10 канала. Проверь точно ли твой передатчик и приемник отдают больше 8 (до11) каналов (у меня с 16 канального X8R идет SBus, соответственно и на APM микросхема декодера прошита для SBus).
У меня прошивка 3.4
PS Загрузил свежий Mission Planner, а там в Radio Calibration уже 14 каналов отображается. Прогресс, однако. Вот там и контролируй каналы 10 и 11 приходят ли от приемника.
в Mission Planer’е в Flight Data, на вкладке Actions при нажатии кнопки Raw Sensor View сколько каналов должно отображаться? У меня только восемь, хотя приемник на 12 каналов.
Я спутал с Radio Calibration (там раньше было 8 каналов вроде). Вот от того, что передатчик или приемник отдают 8-канальный PPM, вот от этого в Raw Sensor View и показывает наверно только 8 каналов.
Спасибо огромное! Во всем теперь разобрался и понял, что РРМ дает только 9 каналов, 10 и 11 не проходят. Приемник стоит вот такой: ru.aliexpress.com/item/…/32821972844.html То ли это ограничение РРМа, то ли еще что. Буду думать. Еще раз спасибо, коллега!
Приемник стоит вот такой
Так там в описании и написано, что по PPM он отдает 8 каналов, а по SBus 12.
Прошивай 32u2 encoder в APM под SBus и бери 12 каналов.
rcopen.com/forum/f90/topic132831/6266
ardupilot.org/…/common-ppm-encoder-apm2x-atmega32u…
А нельзя не мучать АПМ, а подключить с-бас энкодер?
Я делал подвес через АПМ, шло влияние одного канала на другой и видна дискретность. Это очень бесило, поэтому я подключил подвес напрямую к приемнику и все стало хорошо.
А нельзя не мучать АПМ, а подключить с-бас энкодер?
Я делал подвес через АПМ, шло влияние одного канала на другой и видна дискретность. Это очень бесило, поэтому я подключил подвес напрямую к приемнику и все стало хорошо.
Напрямую к этому приемнику не подключишь, у него выход РРМ или S-BUS, раздельных выходов ко каждому каналу нет. Поэтому и мучаем АРМ.
Так там в описании и написано, что по PPM он отдает 8 каналов, а по SBus 12.
Прошивай 32u2 encoder в APM под SBus и бери 12 каналов.
rcopen.com/forum/f90/topic132831/6266
ardupilot.org/…/common-ppm-encoder-apm2x-atmega32u…
Вот я шляпа! Не углядел. Спасибо, что подсказал. Буду пробовать подключить по S-BUS.
Опять засада. Поставил Flip, переткнул джампер, коротнул контакты. Запускаю Flip, выбираю Atmega32U2, жму Connect - USB и выходит сообщение про «AtLibUsbDfu.dll не найден». Когда в Диспетчере устройств жму обновить драйвер и указываю путь в папку Flipа - USB, то пишет, что драйвер в обновлении не нуждается. Попытка зарегистрировать DLLку в системе не помогла. Прошу помощи у товарищей…
Контакты RST и GND замкнул и отпустил или замкнул и держишь?
Не помню уже.
Вот еще инструкция для прошивки через USB кабель (без использования прошивочных адаптеров)
apmcopter.ru/apm/…/proshivaem-ppm-encoder.html
Саму прошивку естественно берете для SBus, а не из статьи (там для PPM).
MP 1.3.58 не видит старые прошивки, видит только файлы HEX. Как решить эту проблему?
Или где найти ARDUPLANE 3,2 серий с форматом HEX
Продолжаю полетушки на крылышке. Пока что доволен только картинкой ГоПро, поляризационный фильтр рулит! Однако крайняя прошивка Ардуплан не работает корректно с F4BY, потому летаю на 3.7.1. ПИД накрутил вручную, автотюн не получился (похоже потому что я задушил расходы крена-тангажа на пульте и забыл об этом, позже попробую сделать автотюн еще раз). Осд надо донастроить, полетные режимы и RSSI отображает не корректно.
Знатоки, подскажите пожалуйста, болтанка у меня потому что ПИД маловат или наоборот? Я стремился снижать. В итоге Р сейчас в районе 1.7-1.9 а I максимально допустимое.
Чтобы корректно настроить пиды нужно забыть про двойные расходы экспоненты и любые другие настройки аппаратуры.
В настройках автопилота полные расходы.
Аппаратура только как джойстик.
Полные расходы механики -10-15 : +15-20 от нейтрального положения в режиме устоявшегося полёта.
Отдельно убедиться в отсутствии люфтов привода каждой рулевой поверхности.
Вручную PID крутить только понимая за что отвечает каждый коэффициент.
крыло не квадрик. Его всегда болтает. Убрать болтанку не удастся полностью.
Ну, классику метрового размера АПМ ведет как тепловоз, монументально ровно. Правда сервы метелят жестоко. 😃
ПИД маловат или наоборот? Я стремился снижать. В итоге Р сейчас в районе 1.7-1.9 а I максимально допустимое
обычно если P великоват то если дать газку начинаются весьма заметные осциляции.
с крылышком очень важно соблюсти рекомендованный для модели центр тяжести.
если сервы сильно медленные могут возникнуть неустранимые за счет пидов колебания, т.е. сервы могут не успевать
можно посмотреть фотку модели?
можно посмотреть фотку модели?
с крылышком очень важно соблюсти рекомендованный для модели центр тяжести.
Хорошо, перепроверю. Есть подозрение на переднюю центровку.
если сервы сильно медленные могут возникнуть неустранимые за счет пидов колебания, т.е. сервы могут не успевать
Сервы EMAX ES08MA II включены на 6 вольт от большого отдельного 3А бека. Должны давать 60 град за 0.1с при моменте 2кг/см. Люфтов нет. Элевоны на петлях + армированный скотч.
Полные расходы механики -10-15 : +15-20 от нейтрального положения в режиме устоявшегося полёта.
Можно уточнить что именно вы имеете в виду? Это градусы максимального отклонения рулевой поверхности?
Можно уточнить что именно вы имеете в виду? Это градусы максимального отклонения рулевой поверхности?
возможно имелось ввиду именно градусы но, скорее всего применительно к моделям самолетов классической схемы, не лк
имхо для скоростного лк с большими рулевыми поверхностями макс расходы существенно меньше