Далеко и высоко. Тактика и практика

Сколько ваш зеленый трактор мач на км, потребляет? 😃
Вставлю пять копеек. Камера ксяоми если подключена к борту, не даёт уйти дальше 2,5 км, забивает сигнал 433. А если включена автономно 15 км легко, без намека на фс.
И как быть в таком случае? Меня это очень взволновало, т.к планирую перейти на лрс.
Вставлю пять копеек. Камера ксяоми если подключена к борту, не даёт уйти дальше 2,5 км, забивает сигнал 433. А если включена автономно 15 км легко, без намека на фс.
Камера Сяоми на борту, подключена к борту через дешевый китайский бек - дальность 10км легко, без намека на фс. Над Москвой, где помехи 433 и так шкалят.
Беспредметный разговор. Камеры бывают разные модели хотя и одной фирмы. БЕКи тоже. Подключена к борту это как ? Можно например только видео а можно еще и питание. Можно запитывать через ЮСБ (тогда будет работать и гадить еще схема зарядки) а можно питать прямо на разъем аккума. Так как ?
Думаю у большинства таких вопросов не возникло, ибо понятно как обычно это делается по умолчанию.
Дата: 23.03.2017 Пилот: kostya-tin Макс дальность: 38027м
Извиняюсь мож не в тему, нет никаких приборов, вот нашел такой USB-осциллограф ISD205A с анализатором спектра, к компу подключается,знает такой кто?
Потянет он хоть как то проверять эл. оборудование бортовое?
У меня такой, мне хватает.
Думаю у большинства таких вопросов не возникло, ибо понятно как обычно это делается по умолчанию.
У меня была подключена через мини usb, 5в из регуля. В общем-то и ЛРС могут быть разные, с различной устойчивостью к помехам. Rlink в моём случае, показал себя не с лучшей стороны.
исходя из моих последних экспериментов шумят DC больше именно по проводам…
Сергей , а можешь статистику с Байчи показать (с последнего полёта например)? по команде SA ?
Могу, вечером, когда дома буду…
Спасибо заранее , а расстояние приблизительно сможешь прикинуть (или не приблизительно) на отдалении 30 минут до базы (приёмыш же пишет статистику за последние 30 минут). Надо ещё Костю научить статистику снимать, тогда ваши сетапы можно по сравнивать и по анализировать, а там и выводы делать по шумам и антеннам.
по просьбам…
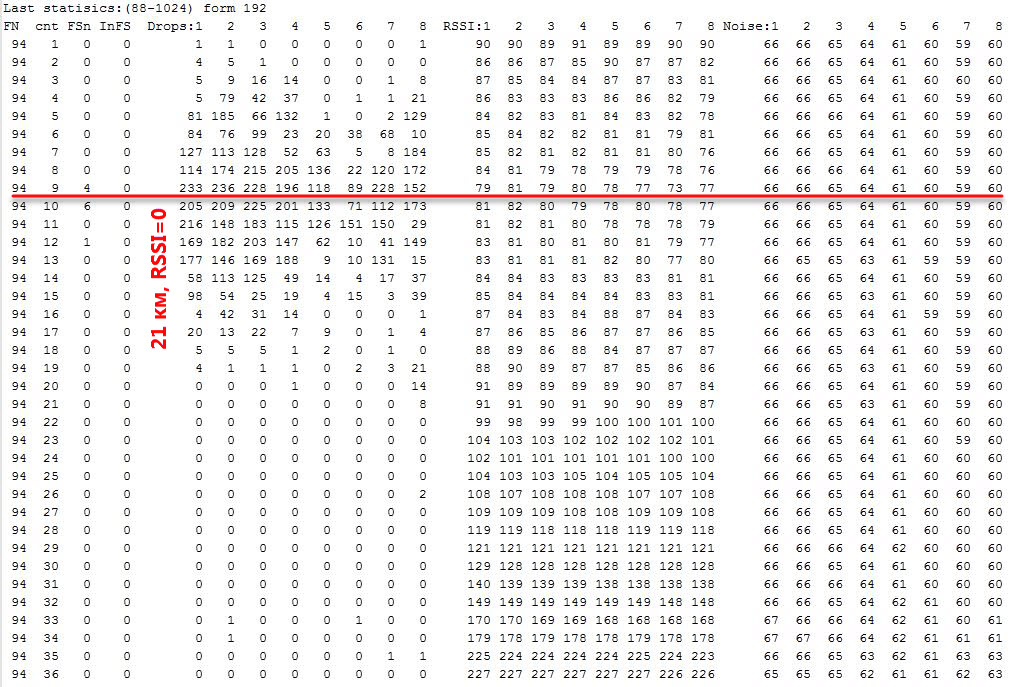
На данных картинках можно видеть пример, на сколько тщательно нужно подходить к питанию борта.
Взлёт из одной и той же точки, направление полёта совершенно одинаковое.
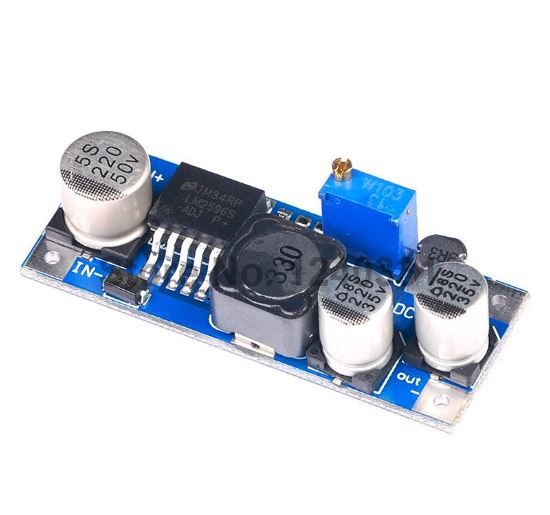
В первом полёте на борту Ская установлен понижающе-повышающий Step Up-Down преобразователь, вот такой
(ПИТАНИЕ ВИДЕО ТРАКТА! К УПРАВЛЕНИЮ НЕ ИМЕЕТ ОТНОШЕНИЯ! камера, передатчик, OSD)
Кликабельно

Управление на 21 километре кончилось, FS и возврат… RSSI =0%
Кликабельно
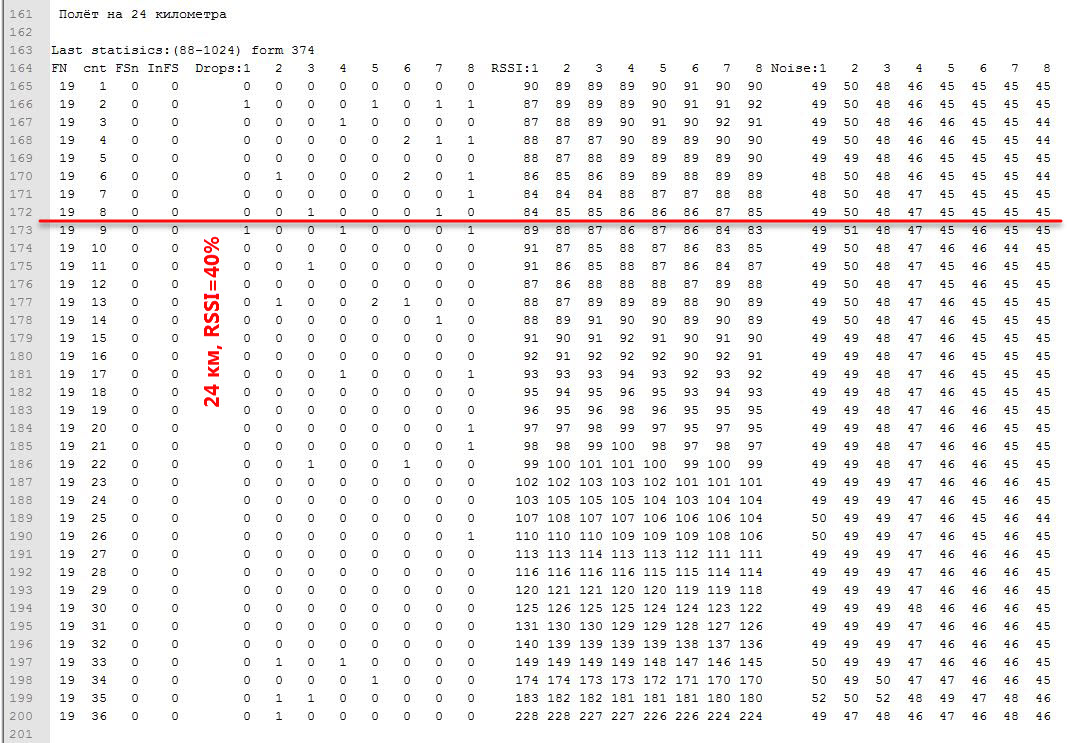
На второй картинке на Скай вместо “красного”, установлен простой Step Up, шумы у которого изначально по схемотехнике ниже чем у понижающе-повышающего
Кликабельно
Абсолютно на то же самое место внутри фюза, более ничего не менялось
24 километра, RSSI =40%
Кликабельно
В своих исследованиях заметил, это и в Гугле находил, что давить шумы более рационально не только по выходу, но и по входу ДС, они почему то “назад” более шумят, чем вперёд. Пробовал в фольгу заматывать и садить на землю, это мало помогает.
Особенно заметно влияние шумов при развороте на базу. Убрав “шумящий” элемент из схемы питания борта при развороте на базу связь довольно быстро восстанавливается(у меня антенна приёмника находится в хвостовой части самолёта).
Пишущие камеры тоже вносят свою лепту в шумы, мешающие РУ. Наверно стоит для рекордов использовать только курсовые, проверенные на спектроанализаторе, ну или мощи побольше и супер антенны:).
Блин, простите, накосячил во фразе "На второй картинке на Скай вместо “красного”, установлен простой Step Up"
конечно же нужно читать "На второй картинке на Скай вместо “красного”, установлен простой Step Down"
начитавшись последних сообщений про шумы DC-DC преобразователей решил сделать проверку. поставил на приемник прошивку передатчика OpenLRSng и включил спектроанализатор. дальше начал включать одельные части оборудования и как-то ничего хорошего не увидил.
так выглядит сканирование, когда ничего не включено:

включил только борт (АП + ОСД + родной Power Module с встоенным DC-DC + рег с встоенным DC-DC + сервы):

борт + ФПВ (передатчик 1.2G 500mW + камера + DC-DC для их питания)

борт +фпв + бек мобиуса, мобиус выкл:

Борт + фпв + бек мобиуса, мобиус вкл:

Борт + ФПВ + мобиус (выкл) + резервный DC-DC для АП:

Борт + ФПВ + мобиус (вкл) + резервный DC-DC для АП

и потом еще решил проверить одну теорию о том, что все эти DC-DC гадят обратно по проводам в общее питание. для начала подключил к DC-DC мобиуса отдельный АКБ. в данном случае питание мобиуса не имеет никакого контакта с общей сетью самолета:

потом запитал резевный DC-DC от другой батареи

так что нужно и мне копать в сторону избавления наводок. в первую очередь стоит попробовать сделать фильтры на входы DC-DC преобразователей
Пормему проще увести рабочие частоты от источника шума.
У меня частоты размазаны по всему диапазону и шумит на всех каналах…
Частоты могут меняться при изменении напряжения батареи.
Пормему проще увести рабочие частоты от источника шума.
шум размазан по всем частотам. тот единственный пик в районе 441 МГц - не в счет
смотри сам, когда ничего не шумит, показания на уровне 40 и ниже, а когда включаю шумные стабы - 50-60
смотри сам, когда ничего не шумит, показания на уровне 40 и ниже, а когда включаю шумные стабы - 50-60
Ну я вижу в “худшем случае” 40-50 в среднем с несколькими выбросами. Впрочем 5ДБ тоже не мало, так что есть смысл повоевать.