Стереоскопическое ( 3D ) FPV

объект в конечном итоге у нас один. Это экран монитора, находящийся на фиксированном расстоянии от глаз. По идее и перефокусироваться некуда
С одной стороны, да. С другой - в глазах есть мышцы, которые сводят-разводят глаза в зависимости от того, смотрим мы на передний или задний план. Когда смотрим на задний - они становятся параллельно, когда смотрим на что-то прямо под носом - сводятся к центру. И эти мышцы при просмотре стерео активно работают.
Использовать только стереоскоп мне не очень понравилось, потому что глаз, в этом случае, смотрит не в центр картинки,
Теперь я не понял. Когда человек смотрит в стереоскоп на 2 картинки, каждая находится своим центром ровно по оси каждого из “глаз” стереоскопа, который зеркалами расширяет стереобазу, чтобы картинки были побольше. Я до покупки мониторчиков выяснил на распечатанных стереопарах, какой размер и расстояние будут максимально возможными для купленного стереоскопа.
в зеркало попадают посторонние объекты, помимо самого экрана. Всё это, как мне показалось, снижает эффект погружения.
Возможно. У меня , да, в смотрелке видно вокруг мониторов стенки, и, да, возможно, это снижает эффект погружения. Но. Есть 2 разные задачи. 1. “летать, чтобы летать”, и 2. “летать, чтобы снимать”. Я максимизирую выполнение второй, и по возможности, реализую первую.
фов получается около 26 градусов. Нет ощущения, что хочется видеть картинку пошире?
Мы говорим о горизонтальном или диагональном FOV? Ощущение, что картинку побольше - есть. Но, для линз- надо делать стереоскоп с бОльшими зеркалами. Зеркала должны быть с передним отражающим слоем. Это сложно. Я тут писал и приводил ссылку на конструкцию стереоскопа с одним зеркалом. Он может дать весьма большой FOV, будет компактнее. Но нужно, чтобы одна из камер выдавала зеркальную картинку. У меня раньше были камеры boscam, но, как я понял, там контора подсдулась. Сейчас купил Gitup2, очень ими доволен, но функции “зеркальное изображение” там нет. Я на форуме rcgroups связался с разработчиками, описал им свою хотелку. Ведь, как я понимаю, для получения зеркального изображения без задержки - надо изменить направление считывания картинки с CMOP матрицы. Они меня поняли, но что сделают - не обещали. 😦 Поэтому- пока вот так, как есть.
экраны смартфонов были бы идеальным решением для наших самоделок.
Собственно, экраны в природе существуют, и очень красивые. Вопрос - как такой купить не по 500$, и как подать на него аналоговый телесигнал , чтобы он его казал без задержек.
Есть, к примеру, EVF - электронные видоискатели от фотоаппаратов. Там вообще всё шикарно - большое разрешение, и размер в полдюйма. Но их отдельно в продаже по внятной цене и с возможностью приёма телесигнала - нигде не видел.
Опять же, у меня сейчас экраны 800*480 и для просмотра PAL их вполне хватает. Кстати, стереокартинка, за счёт именно объёмности, несёт в себе гораздо больше информации и пиксели так в глаз не лезут. Я как-то гонялся на коптере за РУ самолётами - очень забавно. Мы проводили эксперимент - второй человек стоят с шлемом на той же частоте и смотрел один из моих глаз. Так я видел самолёт на гораздо большем расстоянии именно в силу стереоэффекта.
, каждая находится своим центром ровно по оси каждого из “глаз” стереоскопа,
выяснил какой размер и расстояние будут максимально возможными для купленного стереоскопа.
Точно, если ширина каждой картинки будет равна расстоянию между центрами передних зеркал стереоскопа, то центры будут совпадать. Я имел в виду, когда картинка шире чем расстояние между центрами передних зеркал.
Есть 2 разные задачи. 1. “летать, чтобы летать”, и 2. “летать, чтобы снимать”.
Верно. Есть ещё третий вариант. Получить максимальный эффект погружения:) К чему я стремлюсь:)
Мы говорим о горизонтальном или диагональном FOV?
Я измерял горизонтальное. 170мм до передних зеркал, плюс, допустим, 30мм до глаз = 200мм. Если ширина Ваших мониторов 100мм (=>50мм половина картинки), то получается arctan(50/200) = 14° => FOV = 14*2 = 28° для каждого глаза.
Но нужно, чтобы одна из камер выдавала зеркальную картинку.
Собственно, экраны в природе существуют, и очень красивые. Вопрос - как такой купить не по 500$
и с возможностью приёма телесигнала - нигде не видел.
Я именно по этим причинам и привёл ссылку на проект. С их адаптером можно будет использовать недорогие экраны от смартфонов. Правда, сам адаптер недешёвый, но у меня не цель сэкономить и всё равно дешевле 500 обойдётся. Я писал им, и они сказали, что собираются во вторую версию прошивки включить возможность использования композитного сигнала, функцию зеркальной картинки, и изменение соотношения сторон, но не раньше начала 2017 года. Уже февраль заканчивается, а у них что-то тишина по проекту.
а пользовал кто такую штуку ?
hobbyking.com/ru_ru/suppo-3d-2d-multiview.html
вроде как можно тогда свои камеры использовать и нужный моим сонькам сайд-бай сайд режим видео
В комментариях там есть ссылка на сайт suppomodel.com и там чуток подробнее расписаны режимы работы этой штуки. Касаемо стереоскопического режима- ничего не показывают и не пишут. Картинки, которые приведены для демонстрации side-by-side, действительно, стереопары параллельные, но не сжатые по ширине. Судя по 1 каналу передачи видео, я предположу, что эта плата берёт с двух камер картинки, режет из них средние части, склеивает в один кадр, и так отправляет в эфир. Но я могу и ошибаться. Скажите, какие у вас очки ? Мне тоже интересно стало, какой формат сигнала они понимают?
у меня первые соньки синимизер - не олед
просто эта плата дешевле чем покупать черную птицу 2
Но там же 2 камеры уже в комплекте. Или у Вас камеры есть? Из дешёвых решений, я помню, тут участники дискуссии применяли квадратор для охранного телевидения. Я нашёл инструкцию на более новые сони синемайзеры, и там тоже не смог понять, каков формат их входного сигнала. Вы пробовали смотреть в них 3д, скажем с телевизора? Анаморфная стереопара годится? Где каждая картинка сжата в 2 раза, чтобы впихнуть, скажем, в FullHD 2 кадра.Или этим очкам надо, например, покадрово передавать? Показали левый кадр, показали правый, и так с частотой, скажем, 60Гц, на выходе- 30Гц, но стерео.
камеры одинаковые парные разные в количестве есть
поэтому - да - мне дешевле на попробовать именно это решение
очки у меня первые sony carl zeiss cinemizer
3д там side-by-side
данный режим заявлен у этого решения и также есть у черной птицы 2
но черная птица дороже почти в раза и база там жесткая - а так я могу сам определять базу - например закрепить на краях ЛК , и зд у меня будет не только на нескольлко метров но и значительно дальше
те например у меня база не ненсколько см - а пусть будет 15 см - и тогда я смогу лучше оценивать расстояние до земли при низких полетах …
но если черная птица уже опрбованное решение с понятной русской поддержкой от нашего производителя - то вот эта платка черный ящик
Вот поддержу. У меня на коптере база 600мм, и для полётов это прекрасно! Если ставить на крылья ЛК - будет ещё лучше! Ведь ЛК летает выше, чем коптер обычно. У меня была идея даже : если поставить стереовидеосистему на самолёт для РУ воздушного боя - то будет гораздо легче ориентироваться в пространстве. 😃 Обратная сторона большой базы (т.н. “гиперстерео”) - это ощущение, что всё игрушечное и маленькое. я не исключаю, что садиться на таком самолёте надо будет по одному из глаз. Иначе - земля сначала будет казаться слишком близко, а при дальнейшем сближении - выйдет из стереоскопического режима. То есть - участки картинки не будут перекрываться. У меня при 600м - это расстояние - пара метров. Всё, что ближе- не получается нормально увидеть. Слишком близко " к носу".
Касаемо квадраторов. Быстрый поиск показал вот такой, к примеру: minivideospectr.ru/…/miniatyurnyy-4-kh-kanalnyy-kv… Цена вокруг 4тыр. Что несколько дешевле хоббикинговской платы.
В теории, можно, наверно, подойти в магазин со своими очками и камерами, предварительно закрепив камеры на планке, снабдив их выходными “тюльпанами”, и проверить - поймут ли очки вход с квадратора.
а пользовал кто такую штуку ?
hobbyking.com/ru_ru/suppo-3d-2d-multiview.htm
штука интересная, но помойму цена завышена.и поскольку она полностью аналоговая при паралельной стереопаре вы получите разрешение на “на один глаз не более 300х480”.-либо обрезаное либо сжатое по горизонтали,самое главное-ничего не сказано про “синий экран”
про квадраторы-пробовал 2квадртора- первый был аналоговый-да получаеться 3д-дает все тоже что и выше описаная “штучка”-цепляются любые камеры кишки-10битный чип при использовании VGA монитора картинка нормальная без ореоолов свойственных дешовым 5"дисплеям картинка как 3д распознаеться телеком LG55.суммарная задержка 50мс с вга монитором,75мс с аналоговым.
второй квадратор имеет выходы HDMI и полноценныйVGA при соответсвующем дисплее на один глаз разрешение 950х540 какбы супер,но на 3д телеке картинка ратянутая,но при использовании 3Dсмотрелки вы получите стреовизор с нормальным разрешением + дополнительное поле для разной системной информации (либо сверху либо с низу )-задержка на всей цепи - от камеры до дисплея 105мс(по хдми),НО опять же проблема -синий,а точнее чорный екран,хотя и восстанавливающийся почти мгновенно.иногда бывают при частых дропах по радио краткосрочные замерзания картинки и мерцания.
вот первый ru.aliexpress.com/item/…/1073463883.html
вот второй ru.aliexpress.com/item/…/32315448605.html
кстати второй квадратор можно сказать промежуточный этап для цифрового тлинка-можно на большой коптер дополнительно поставить IP камеру и гнать ее на землю по гсм или вайфай и соответственно прямо в “глаза”
Вот, гляньте, надысь полетал. Опробовал сделанный хедтрекер (DIY-headtracker) одну ось Pitch вывел на аппаратуру, а сам хедтрекер закреплён на ней. это сделал, чтобы удобнее было управлять наклоном камеры. Если видите анаглиф - переключите ютуб на флеш-плеер. Есть к большинству браузеров плагины для этого.
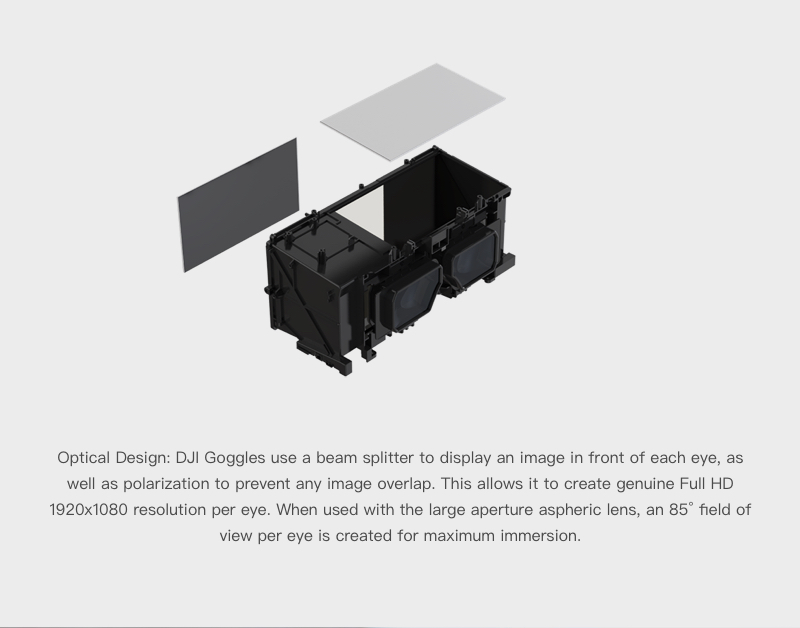
Бахарев выложил эту ссылку в соседней теме, копирую здесь. Я рассматривал такую схему, но отмёл её, т.к. не знал как решить проблему с наложением двух картинок друг на друга, а они, оказывается, эту проблему поляризацией разрешили. Я поверхностно осведомлён о поляризации, но если есть не слишком дорогое решение, то такая схема была бы, как мне кажется, оптимальна для стерео фпв. Гораздо компактнее и феншуйнее, чем параллельное расположение дисплеев. Ну и по теме: beam splitter
а в каком месте инфа что этот шлем 3Д?
а в каком месте инфа что этот шлем 3Д?
Сам шлем походу не 3D. Мне понравилась идея решения проблемы наложения картинок друг на друга за счёт поляризации, которая позволяет использовать подобное расположение дисплеев (т.е. один сверху, а другой на задней стенке или снизу) для 3D.
Конкретно в этом шлеме для реализации 3D, на сколько я понимаю, не хватает только двух приёмников, каждый из которых передавал бы сигнал на свой дисплей.
Нашёл аналогичную этой ветку в rcgroups. Возможно, она будет кому-либо полезна. www.rcgroups.com/forums/showthread.php?1644240-3D-…
Ещё вот что хочу показать. У CCTV камер есть т.н. “коридорный” формат кадра. Как раз - кадр вертикально. securecam.ru/articles/koridor_format/
Тут недавно был разговор про идею так смотреть стерео, чтобы по вертикали угол увеличить. Я не знаю, есть ли аналоговые такие камеры, но, вдруг, есть?
Свежие видео мои в обработке. Скоро будут.
Почти всё меня устраивает, из тряски остались только горизонтальные покачивания в стороны. Балку 600мм в карман не спрячешь, у неё момент инерции большой. Кстати, на видяшке ещё видать, что я начал пользовать хедтрекер, и это, по-моему, добавляет удобства и интереса съёмке.
Вылез я на rcgroups со своими видяшками и меня сразу же чуток напинали на тему, что у меня ракурсы плавно расходятся из-за встроенных в камеру стабилизаторов. Я проверил, как было говорено -анаглифным просмотром и точно, плавненько чуток гуляют ракурсы, хотя изначально всё было сведено. Так вот - убрал.
Прошу заценять. Кстати, качество картинки без стаба заметно лучше.
Гляньте, какая хреновня забавная. Я полагаю, было бы интересно на такой полетать.
banggood.com/Realacc-Horns-100-Micro-3D-FPV-Racing…
Дмитрий, а можно узнать ваш сетап ?
какие камеры ? чем пишете ? во что глядите ? или только пишушая камера стерео ?
Собственно, со времён моего первого взлёта ( rcopen.com/forum/f90/topic302860/55 Мало что поменялось.
Смотрелка, из двух телевизорчиков 5" и стереоскопа, осталась всё та же, только приёмники теперь закреплены за телевизорами, а батарейка- на шнурке в кармане. Приёмо-передающий тракт - две штуки, для каждого глаза отдельно - Boscam 5.8ГГц на разных каналах.
Коптер тоже помаленьку эволюционирует. Вот почти так он выглядит сейчас:


Сетап такой: гекса соосная на назе-лайт, шитой в в2. моторы mt3506-650, пропеллеры APC MP 12x4.5 - верх, APC MP 12x5.5 низ. Батареи 4S. 5-5.8Ач.
Взлётная масса 2.5-2.7кг. Время полёта - 11-13минут. Аппа - Graupner mx-20, и к ней прикручен DIY-хедтрекер. У аппаратуры есть телеметрия, GPS, она пишет на флешку лог, говорит по требованию всякие высоту, дальность и “пора на базу” по вольтметру.
а стереопару кто пишет ? что за камеры ? как устроена синхронизация записи и как потом на земле сводится воедино ?
хедтрекер дает управление только на ось наклона ? моторчика на панораму не вижу
Камеры Gitup Git2. Пишут каждая свой поток независимо. Включение записи видео или съёмка фото осуществляются трёхпозиционным переключателем с аппаратуры. Такая функция у прошлых камер Boscam тоже была. От приёмника через Y кабель - и на камеры. Вниз тумблер - видео, по центру - ничего не делать, вверх - снять кадр.
Синхронизация при съёмке не производится никак, только при начале записи я “киваю” головой вниз - это “ориентир” для синхронизации. В полёте никаких проблем с неодновременностью работы камер вообще не заметно. Далее, полученные видеофайлы, вгружаю в программу “Stereo Movie Maker”. stereo.jpn.org/eng/stvmkr/index.html И в ней свожу ракурсы, там есть автоматическое сведение, устраняющее всякие небольшие кривизны установки камер, плюс там же правлю “рыбий глаз”, плюс синхронизирую по времени, чтобы погрешность была 1 кадр, не более. Это довольно просто, а при 60к/с - рассинхронизация в 1 кадр не ощущается. Мной во всяком случае. Хедтрекер прикреплён к аппаратуре и рулит осью Pitch вместе с крутилкой. Это сделано потому, что мне не хватает рук в полёте повернуть голову вверх-вниз. Вот представьте, лечу вокруг дерева, а макушка уже не влазит в кадр. Я и поворачиваю по руддеру, и двигаюсь вбок, и держу высоту. Высвободить 2 пальца, чтобы покрутить высоту наклона камер - никак. Трёхосевой подвес я не стал делать по причине безопасности. При срыве мотора или просто резком маневре коптера - эта балка сможет отлично въехать камерой в один из моторов.
По руддеру вращаю всем коптером. Поставил пологие кривые.