PitLab FPV System: OSD+Autopilot+Ground station

ясно, это конечно дело пользователя, но если её установить на грани сваливания, её практически никогда не видно, но как индикация будет полезна, если вдруг “задумался”
Это как в машине - задумываться оч. вредно… 😉
А вообще тут настроек-то много. И хорошо, чтобы по-подробней все было разжевано.
Я вот по-англицки две буквы знаю (не, четыре!). И часто - научным методом пользуюсь.
Пользователи - они разные. Кто-то с лету, кому-то три дня соображать надо и то не факт… 😃
Чем смогу-помогу, пиши не стесняйся…
Настроил минималку (STALL). А до того как - не те циферки ставил…
Сегодня слетал, проверил. Для моего самика 50 км будет хорошо.
Но если вдруг выскочит в полете - вздрогну! 😲
Нигде лучше режима AUTO (RTH) как в ПитЛабе - нету!
Как сегодня ровненько, без мотора, с 13 км шел… 😃
Stall-можно изначально завысить немного чтобы не вздрагивать от появления надписи на экране, я как-то на него внимания не обращаю, зависит от самолёта, а для моего ская скорость сваливания минимальна. При сильном ветре с поддержкой питлаба Скай летел задом, долго не мог понять по монитору осд, что происходит. Короче Питлаб рулит.
А ещё отличная тех поддержка, ремонт со дня отправления, до получения обратно составиляет от 16 до 20дней. Уже трижды проделывал это.
Наконец то! В новой версии ПО будут маршруты с изменяемой высотой точек! 😃

Наконец то! В новой версии ПО будут маршруты с изменяемой высотой точек!
А сейчас что? нельзя выставлять высоту заданных точек? или я ЧЁ то не понял? 😃
Питлаб как и любой другой АП имеет режим полёта по точкам, и в точках можно задавать высоту… Точек по моему 10 если не ошибаюсь… Но если ты хочешь летать в разные направления, каждый раз нужно перезабивать точки!
У Питлаба ещё есть режим полёта -“маршрут”, он немного отличается от полёта по точкам спецификой выдерживания прямых между точками, более точно соблюдает… Но самое главное, в систему можно забить 10 маршрутов по 127 точек единовременно!
Ранее маршруты поддерживали полёт на одной высоте на протяжении всего маршрута, теперь можно устанавливать высоту в каждой точке!
После выхода прошивки, можно будет забить кучу маршрутов и летать по ним не бегая каждый раз к компу!
в систему можно забить 10 маршрутов по 127 точек единовременно!
Что такое одна точка в маршруте ? - Это точка содержащая в себе координаты GPS и высоту ?
И что такое один маршрут ? -Это набор точек (до 127) по которым последовательно будет лететь самолет выходя на координаты и высоту?
Если так то можно забить 3-4 маршрута и перед полетом выбрать …так куда мне сегодня в сторону севера или юга лететь? Удобно когда ветра разные и нужен заход с разных сторон.
Да, все именно так!
Будем ждать официального релиза.
В этом режиме при движении между точками при фс тожемполетит домой если нет настроенной задержки на возврат?
Недавно писал про странный полет, предположение что проблема была в плохом контакте кабеля элеронов подтвердилась. Питлаб ни в чем не виноват))
Одел нормально кабель на гребёнку и все, больше ничего не делал и самолёт полетел как положено)
Слетал первый раз за облака) высота 2000 метров, удаление 10 км. Возвращался в авто режиме, мотор не включался вообще)
В этом режиме при движении между точками при фс тожемполетит домой если нет настроенной задержки на возврат?
полетит, куда он денется…
Вчера достал с чердака старичка ТвинСтар, решил облетать Питлаб. Сегодня в обденный перерыв выбрался на поле и полетел. Впечетления от автопилота в общем положительные. Крутил вертел- авиагаризонт как приклеенный. Взлетел, подстроил горизонтальный полёт, сохранил тримеры. Стабилизирует отлично, в авторежиме тоже нормально. Как мне показалось, уж очень экономно он хотел лететь но сегодня ветер 5-10 м/с поэтому пришлось пересохранить тримера с чуть более увеличенным минимальным газом- полетел более уверенно. Летал три раза, первые два полёта цифровой датчик воздушной скорости врал безбожно, перед взлётом и после посадки показывал -22 -30 км/ч, на третий полёт включился уже с нулём и работал вродекак адекватно. Помощник взлёта без вопросов, в полёте стабилизация железная, если на фишке в стабе хоть и вяленько, но можно крутануть бочку или петлю, то здесь как не дёргайся, а за определённые лимиты углов хрен наклонишь. Домой ведёт чётко, удержание курса и высоты тоже отлично, по маршруту ещё не пробывал. Вопросик: как заставить лететь с большим газом? пересохраняя тримера? Регулировка скорости сваливания только на предупреждающую табличку STALL влияет ?
Видеоконвертер жрёт качество ужасно, AVS Video Converter, Может есть получьше? где взять?
Молоток, поздравляю! Носитель - пуля?
Скорость сваливания влияет только на табличку…
Сохранение триммеров на газ вообще не влияет…
Скорость возврата, а какой тип газа у тебя выбран? Если “плавно” - то АП будет газовать только для поддержания нужной высоты и может вообще отключать газ и приводить самолёт домой с большой высоты вообще без газа… Этот режим очень экономичен. Если ты хочешь увеличить скорость возврата, поставь тип газа “постоянный” и потом уже определись с настройкой уровня газа при возврате…
Датчик воздушной скорости до момента включения АП и определения автопилотом базы (момента сохранения базы в ручную) нужно держать закрытым “заглушкой”, в это время он калибруется.
Пробуй, спрашивай, всегда рад помочь.
Видеоконвертер жрёт качество ужасно, AVS Video Converter, Может есть получьше? где взять?
я в Vegas всё делаю, там куча настроек, в том числе и по качеству
По воздушному датчику, я обычно поступаю так:
-
Естественно при включении питания или при запоминании базы на трубке одет чехол, красного цвета, чтобы не забыть…
хотя было, забывал 😃

-
Поправку в настройках устанавливаю на “ноль”
-
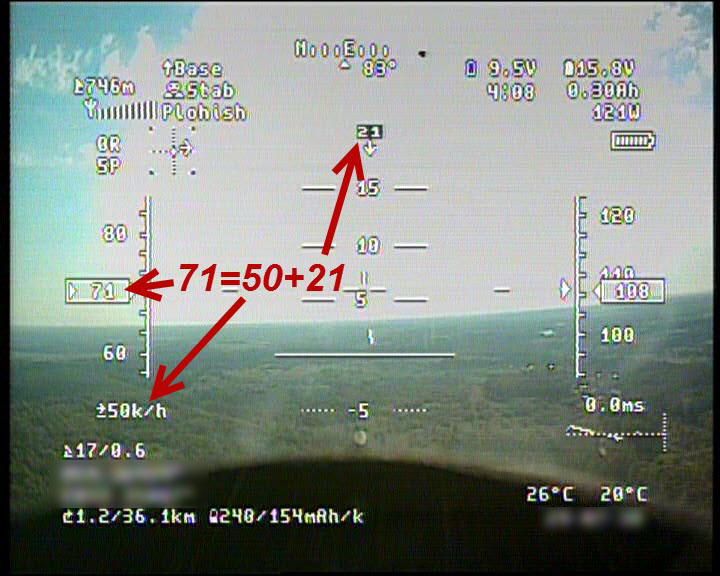
в полёте делаю круг, АП достаточно чётко определяет направление и скорость ветра по GPS сносу
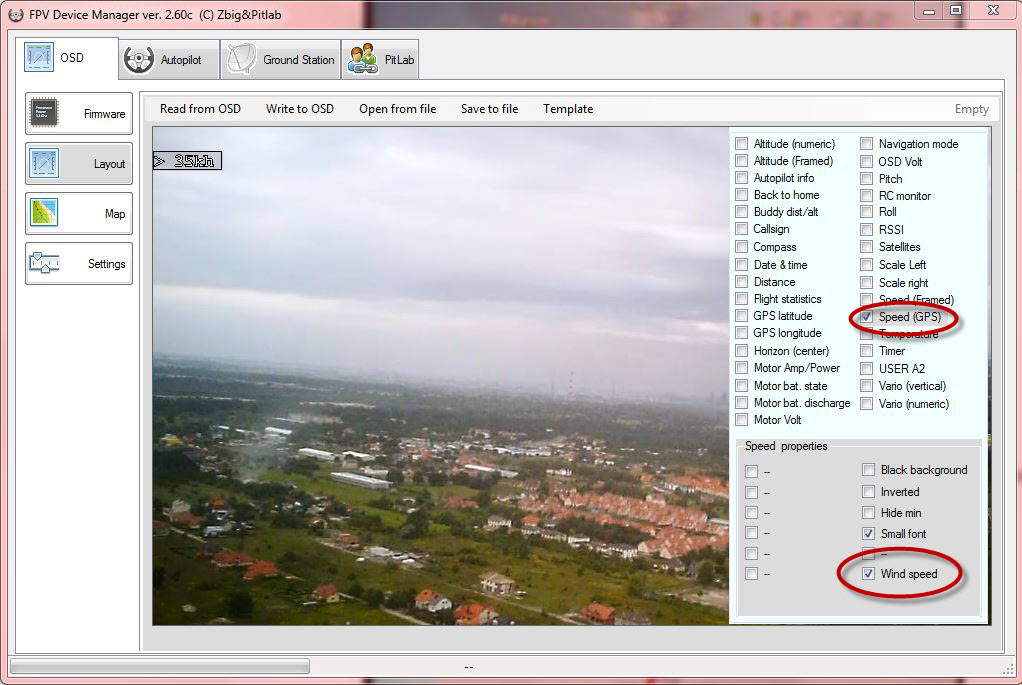
(для того, чтобы увидеть это на OSD, нужно включить через FPV_manager в пункте SpeedGPS галочку Wind speed)

- встаю курсом на ветер, и после этого уже устанавливаю поправку датчику, чтобы ВОЗДУШНАЯ скорость была ровна скорости по GPS плюс СКОРОСТЬ ВЕТРА.
(надо понимать, что прям в ноль соответствия возможно и не будет, но как правило очень близко.)
Всё, на этом настройка закончена и никогда к ней не возвращаюсь! НЕ смотря на то, что например при взлёте или после посадки датчик показывает фигню…

Разработчик говорит: “Датчик вещь очень чувствительная, и при отсуттсвии движения самолёта, показывает флуктуации - всё что угодно…
Однако после набора буквально 5-10 километров в час, флуктуации датчика становятся несоизмеримо меньше полезного сигнала и он выходит на нормальные показания…”
”3. в полёте делаю круг, АП достаточно чётко определяет направление и скорость ветра по GPS сносу”
Я так понимаю круг нужно делать в режиме авто?
Я так понимаю круг нужно делать в режиме авто?
интересно как ты это в “авто” сделаешь? 😃 в “авто” самолёт не управляется…
нет, не в “авто” а в ручном или в “стаб”… при этом нельзя изменять положение стика газа и пользоваться рулями высоты и направления… не нужно стараться выдерживать круг по траектории…
просто положил аккуратненько на крыло, не слишком круто, плавно развернулся на 360 градусов… на OSD должен появиться знак со скоростью и направлением ветра (естественно предварительно в настройках указать)
по ходу полёта я это делаю несколько раз… в разных местах и на разных высотах ветер разный как ты знаешь… Хотя с другой стороны, о ветре можно судить по разнице между GPS и воздушкой…
Молодец, поздравляю! Спасибо за приятные слова в мой адрес 😃
А коробочка-то таки и напрашивается…
Это в адрес производителя.
Не думает?