PitLab FPV System: OSD+Autopilot+Ground station

Видеоконвертер жрёт качество ужасно, AVS Video Converter, Может есть получьше? где взять?
я в Vegas всё делаю, там куча настроек, в том числе и по качеству
По воздушному датчику, я обычно поступаю так:
-
Естественно при включении питания или при запоминании базы на трубке одет чехол, красного цвета, чтобы не забыть…
хотя было, забывал 😃

-
Поправку в настройках устанавливаю на “ноль”
-
в полёте делаю круг, АП достаточно чётко определяет направление и скорость ветра по GPS сносу
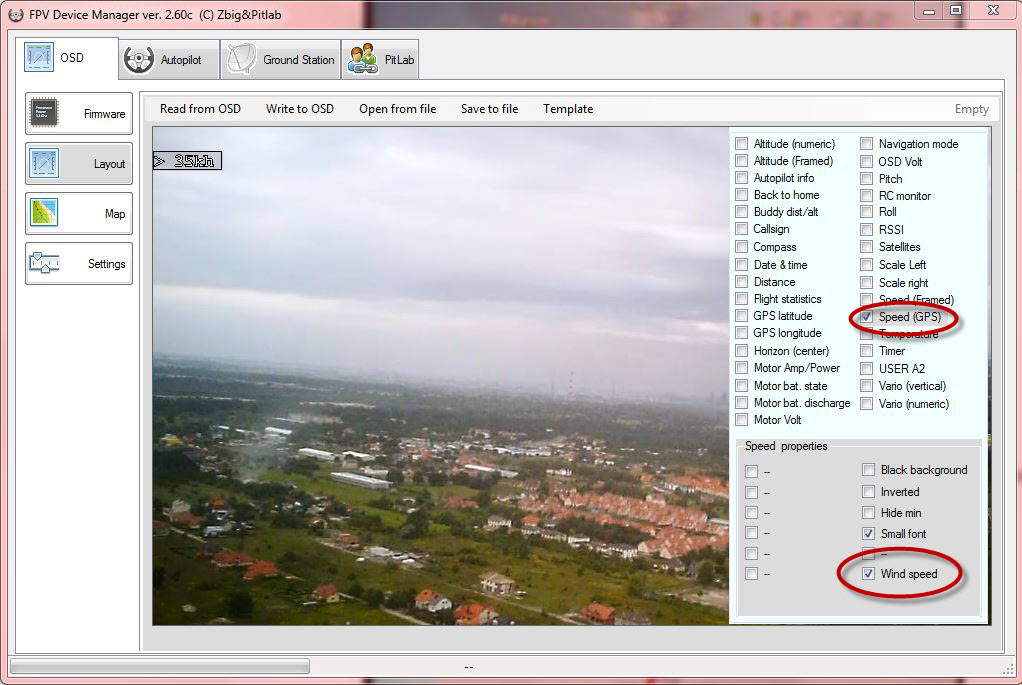
(для того, чтобы увидеть это на OSD, нужно включить через FPV_manager в пункте SpeedGPS галочку Wind speed)

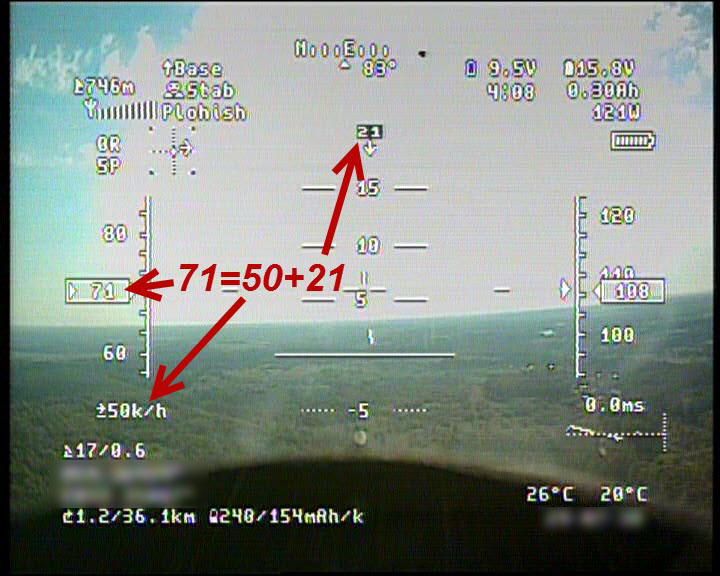
- встаю курсом на ветер, и после этого уже устанавливаю поправку датчику, чтобы ВОЗДУШНАЯ скорость была ровна скорости по GPS плюс СКОРОСТЬ ВЕТРА.
(надо понимать, что прям в ноль соответствия возможно и не будет, но как правило очень близко.)
Всё, на этом настройка закончена и никогда к ней не возвращаюсь! НЕ смотря на то, что например при взлёте или после посадки датчик показывает фигню…

Разработчик говорит: “Датчик вещь очень чувствительная, и при отсуттсвии движения самолёта, показывает флуктуации - всё что угодно…
Однако после набора буквально 5-10 километров в час, флуктуации датчика становятся несоизмеримо меньше полезного сигнала и он выходит на нормальные показания…”
”3. в полёте делаю круг, АП достаточно чётко определяет направление и скорость ветра по GPS сносу”
Я так понимаю круг нужно делать в режиме авто?
Я так понимаю круг нужно делать в режиме авто?
интересно как ты это в “авто” сделаешь? 😃 в “авто” самолёт не управляется…
нет, не в “авто” а в ручном или в “стаб”… при этом нельзя изменять положение стика газа и пользоваться рулями высоты и направления… не нужно стараться выдерживать круг по траектории…
просто положил аккуратненько на крыло, не слишком круто, плавно развернулся на 360 градусов… на OSD должен появиться знак со скоростью и направлением ветра (естественно предварительно в настройках указать)
по ходу полёта я это делаю несколько раз… в разных местах и на разных высотах ветер разный как ты знаешь… Хотя с другой стороны, о ветре можно судить по разнице между GPS и воздушкой…
Молодец, поздравляю! Спасибо за приятные слова в мой адрес 😃
А коробочка-то таки и напрашивается…
Это в адрес производителя.
Не думает?
Нет не думает, да и я летая на Питлаб уже года четыре, уверен, не нужна она…
“интересно как ты это в “авто” сделаешь”
Режим авто, газ на максимум= полет по кругу. Не?
Формально да, это режим круга, но там АП газует, может и не получиться…
А коробочка-то таки и напрашивается…
нет, я конечно не так категоричен, что “не нужна и точка…”, если бы была, наверное ничего плохого в этом не было бы…
Но и её отсутствие не мешает уже 4 года эксплуатировать систему на разных носителях…
Производитель наверняка не хочет дополнительно удорожать конструкцию… как ни крути она и так не дешёвая… А коробочку, тот кто хочет, вполне может сам сделать…
Согласен, кому надо - сделают. У меня есть ))
Вот на счет “удорожания…” Ну это же не датчик воздушной скорости ))
Хотя бы простейшую, копеечную выкройку из прозрачного лексана, с пропечатаными обозначениями разъемов, каналов, с обозначением где плюс и где минус… Согнул и готово! Представили?
Чтобы каждый раз бумажку-инструкцию не разглядывать, вспоминая…
Можно еще и свою “фирменую” виброразвязку сообразить. Хотя, к примеру APM-овская подходит. Себе такую поставил ))
А платки прикрыть не помешает… ПитЛаб не из дешевых…
Все равно дорого?
А коробочка-то
Хотя бы на сайте разработчика был бы stl файлик для распечатки корпуса кому нужно.Уже прогресс и всё такое…
Сделайте stl, все вам спасибо скажут…
Я могу отправить разрабу, он разместит.
Если б я сделал,давно бы сюда закинул.)
Сегодня был второй выход в поле с Питлабом, полетал уже более осмыслено. Попробую поделиться впечатлениями. Вы не поверите, но сегодня я ПЕРВЫЙ раз испытал настоящее удовольствие от ВИЗУАЛЬНОГО полёта. Визуальное управление для меня всегда было небольшим стрессом и напряжением, ни о каком удовольствии речи не шло. Может модели просто такие, на Скае было скучно кружить вокруг себя, на пено-пилотаге как-то всё криво получалось, Твин Стар ужасно неустойчивый по крену, при потере скорости валится на крыло и штопорит, Пулю визуально вообще хрен удержишь. А тут вдруг в одночасье я стал крутым пилотом, вылез из машины и летал визуально, проходил в метре над полосой ширина которой 2 метра, раньше я и не мечтал о таком, развороты подход всё четко ну прямо крутой джет-пилот, кайфовал так прям сам удивляюсь. Но когда летал по камере не оставляло ощущение, что играю в старинный аркадный авиасимулятор, может помните были всякие разные стрелялки вроде летишь, но очень не реалистично. Летая на Фишке я понимал, что лечу на самолёте, сохраняется реалистичность полета именно самолёта, с присущими каждому из них особенностями. Питлаб отлично стабилизирует, и сможет вести любую модель. Но летит Пит, а не пилот. Отклонил стик на 10* , летишь с 10 градусным креном, отклонил на 20* вот тебе 20 градусный крен не больше не меньше, тоесть управляешь не самолетом, а задаёшь Питу углы крена и тангажа по которым он будет лететь. Вот такие выводы: Фишка очень деликатно почти незаметно для пилота поддерживает модель, ведет жестко только в авторежиме. Пит вообще не передаёт реалистичности полета, только лишь принимает к сведению задаваемые углы крена и тангажа, аркадная бездушная железяка. Но когда во время прохода над полосой меня за ногу укисило какое-то злобное насекомое, я бросил стики, спасаясь от повторного нападения забыл про модель, будь там Фишка были бы дрова, а так модель почти скрылась из вида, но летела строго вдоль дороги на 1,5 метровой высоте.
Забыл написать про датчик воздушной скорости. Одел на трубку Пито трубку, показывало опять -20 -30 пока не нажал запомнить базу и сразу установилось в ноль.
интересный отзыв 😃
ты не забыл для начала поставить в ноль поправку на датчике воздушки? Ведь в прошлых полётах ты вертел его до +32%…
Ставил ноль, потом +16 поставил трубка Пито у меня пострадала в предыдущем краше я ее выпрямил как мог, может где перегиб.
я бросил стики, спасаясь от повторного нападения забыл про модель, будь там Фишка были бы дрова, а так модель почти скрылась из вида
Значит у Пита стабилизация с автоудержанием или из за запоминания Тримеров для ровного полета , у фишки нет такого, она только в 3д или АДХ может высоту по баро держать в момент отпускания стиков. А в режиме стабилизации только стабилизирует самолет и делает управление плавным, но если вниз самолет тянет то так и полетит к земле если бросить стики , тогда поднять тример нужно. Я именно тримером руля высоты постоянно пользуюсь, для взлета и посадок.
Но тут одно но, если Пит запоминает тримеры для ровного полета, то как быть если на некоторых моделях в том числе у меня, тример для ровного полета только с одной тягой можно установить, как только тягу уменьшить или увеличить то самолет меняет угол тангажа, тут только авто режим спасает, который к баро высоте привязывается и курсу и не важен какой газ и куда клонит самолет. Он всегда полетит правильно в авто режиме, поэтому на ней и облетывать легко модели.
Сохранение триммеров в Питлаб нужно исключительно для режима “авто” и к приведенному Андреем примеру не имеет отношения… Триммеры сохраняются для того, чтобы АП знал оптимальное положение рулей при котором самолёт летит ровно и наиболее экономично, чтобы отталкиваться от этих значений при полете домой, и их придерживаться не более того…
Привет, друзья! Сегодня в очередной раз насладился полётом на высоте 35-40м под присмотром ПитЛаба.