Mini Talon - носитель Fpv

Только что проводил обстрел своих новых тактических страйкбольных очков из литого поликарбоната и посетила мысль (народ маялся какое стекло поставить на кабину для защиты камеры что бы без искажений, абсолютная прозрачность и крепкое) купить такие очки (мне обошлись 500 руб.) в охотничьем магазине и запилить из них стекло. Крепость у них потрясающая, выдерживают выстрел дробью из охотничьего ружья. Мало того еще имеют сферическую поверхность. Как вариант… 😃.
Отлетал сегодня с новым двигателем.
Общее впечатление-плюс- мощи добавилось, скорости тоже, минус-стал менее экономичен.
Насчёт ЦТ-сдвинул на 57мм, стабильности не прибавилось, сильно проявилось пикирование, Нужно компенсировать рулем высоты.
Дальность- убрал зарядку пишущей камеры, заметно прибавилось дальности, на той же высоте плюс пара километров, после этого смог поднять самолёт ещё на 200 метров и преодолел 17км. Связь по РУ стала более устойчивой.
Дальность- убрал зарядку пишущей камеры, заметно прибавилось дальности, на той же высоте плюс пара километров, после этого смог поднять самолёт ещё на 200 метров и преодолел 17км. Связь по РУ стала более устойчивой.
😃
а я вам говорил…
отпишись пожалуйста в rcopen.com/forum/f90/topic200764
при посадке в траву колесо отрывается сразу…
никто его не ставит…
Мне ещё башмак под это колесо не нравится. Помышляю и его срезать.
Мне ещё башмак под это колесо не нравится. Помышляю и его срезать.
полностью срезать не рекомендую, останется очень тонкий пол в фюзе…
Мне ещё башмак под это колесо не нравится. Помышляю и его срезать.
Cрезал с закруглением, ну чтобы форму предать:)
Как Сергей писал-тонкая часть остаётся. Я взял карбоновую полосу 10х0,5мм, параллельно 5 штук и наклеил на єто место. Получилась своеобразная лыжа. И нос усилил и скользкая она.
Посадок 20 уже сделал в таком исполнении, пока всё хорошо.
Напишу может и глупости, сильно не судите, в этой части я профан.
Поставил новый двигатель, не впечатлён.
Ближе к вопросу, может и не двигатель виноват.
Итак, например, я хочу, чтобы самолет, при скорости(воздушной) 60 км\ч летел горизонтально. Для этого я тримирую РВ и когда он у меня при стабилизации(без удержания высоты) летит горизонтально и при переключении на ручку тоже высота не изменяется - значит я “на коне” 😃
Так на старом движке и было, поставил новый двигатель, плюс по многим рекомендациям в теме сдвинул ЦТ практически на 55мм. Думал, стабильнее будет, не тут то было, стабильнее на глаз не стало, зато сильно проявилось пикирование, и если раньше при скорости 55-60км\ч самолёт летел горизонтально, то сейчас уже нужно 70км\ч. Естественно, энергопотребление выросло за счёт движка(тока) и РВ в режимах со стабилизацией.
Хочу уйти обратно на 60мм ЦТ, РВ по моим ощущениям встанет в ноль при 60км\ч и жрать движок должен меньше.
На днях пересматривал полёт Константина на дальность, он там держит скорость 40-50км\ч, то есть я так понимаю, чтобы снизить энергопотребление.
Ну физика процесса описана верно. Двигатель ни при чем. Потребление на скорости 70 резко растет. Двигайте центровку назад. Если хотите оставить переднюю то нужно по новой АП настраивать. Скорость 50 я думаю все же ближе к круизной чем 60.
Cрезал с закруглением, ну чтобы форму предать:)
Как Сергей писал-тонкая часть остаётся. Я взял карбоновую полосу 10х0,5мм, параллельно 5 штук и наклеил на єто место. Получилась своеобразная лыжа. И нос усилил и скользкая она.
Посадок 20 уже сделал в таком исполнении, пока всё хорошо.
Напишу может и глупости, сильно не судите, в этой части я профан.
Поставил новый двигатель, не впечатлён.
Ближе к вопросу, может и не двигатель виноват.
Итак, например, я хочу, чтобы самолет, при скорости(воздушной) 60 км\ч летел горизонтально. Для этого я тримирую РВ и когда он у меня при стабилизации(без удержания высоты) летит горизонтально и при переключении на ручку тоже высота не изменяется - значит я “на коне” 😃
Так на старом движке и было, поставил новый двигатель, плюс по многим рекомендациям в теме сдвинул ЦТ практически на 55мм. Думал, стабильнее будет, не тут то было, стабильнее на глаз не стало, зато сильно проявилось пикирование, и если раньше при скорости 55-60км\ч самолёт летел горизонтально, то сейчас уже нужно 70км\ч. Естественно, энергопотребление выросло за счёт движка(тока) и РВ в режимах со стабилизацией.
Хочу уйти обратно на 60мм ЦТ, РВ по моим ощущениям встанет в ноль при 60км\ч и жрать движок должен меньше.
На днях пересматривал полёт Константина на дальность, он там держит скорость 40-50км\ч, то есть я так понимаю, чтобы снизить энергопотребление.
Тоже с такой проблемой столкнулся.
Поставил центровку на 55-56мм и самолет стал резко пикировать вниз (без руля градусов на 15-20 ныряет вниз).
Вес около 1600, 3S, 2836 x 1500kv, 9x6APC.
Поставил центровку на 55-56мм и самолет стал резко пикировать вниз
а какая была? 76мм, как в мануале?
Понимаю, что вопрос не мне, но у меня была изначально примерно 63мм, на скоростях выше 60км\ч самолёт медленно набирал высоту. Позарился 😃 на видео Сергея и решил сделать более переднюю. Но офигенно это стабильности не добавило(по видео не видно), но резко проявило пикирующий момент. РВ при такой центровке(63мм) стоял практически в нуле. Я думаю, что стабильность это всё же заслуга автопилота и высоты полёта.
Ну а если есть пикирование, то автопилоту это приходится исправлять тягой двигателя и РВ, что приводит естественно к увеличению энергопотребления.
Почему у Плохиша маленькое энергопотребление при 55мм даже не знаю.
На днях пересматривал полёт Константина на дальность, он там держит скорость 40-50км\ч, то есть я так понимаю, чтобы снизить энергопотребление.
Мне кажется там АП подвирает с воздушной скоростью. Талон не будет лететь горизонтально на 40-45 кмч. Только с потерей высоты. В остальном у тебя все верно.
там АПМ и врал летел я с приличным встречным ветром, даже слегка боковым. вон в крайней точке удаления наземная скорость упала до 25 км/ч, а как только завернулся, самолет легко пошел под 100км/ч
с приличным встречным ветром, даже слегка боковым.
Костик , это как так))) приличный ветер и слегка боковой)? Одновременно что ли два разных течения ?
по диагонали
вообще в таких полетах сложно что-то говорить о направлении ветра, т.к. в зависимости от расстояния и высоты меняются и сила и направление
наземная скорость упала до 25 км/ч,
а как только завернулся, самолет легко пошел под 100км/ч
Значит 70-75 км/ч воздушная , при условии постоянного тока до и после разворота.
Значит 70-75 км/ч воздушная
62,5 км/ч
а какая была? 76мм, как в мануале?
Где-то так, не помню точно, нужно мерить…маркером метка стоит
Мне кажется там АП подвирает с воздушной скоростью. Талон не будет лететь горизонтально на 40-45 кмч. Только с потерей высоты. В остальном у тебя все верно.
У меня летит на руках. Если необходимо можно и АП настроить и будет лететь.
Я думаю, что стабильность это всё же заслуга автопилота и высоты полёта.
Я тоже так думаю. Тоже "поигрался"с Ц.Т. ,поставил другой ак. ,Ц.Т. оказался по сервоканалам. Два взлета с большим левым креном и просадкой,в полете и на посадке нормально,но скорость больше и чувствовалось что его тянет в пике,посадка тоже на бОльшей скорости. Свинцом перетащил Ц.Т. на 55мм и полетел нормально. Расход емкости батарей самый маленький был 103mah,меньше никак. Причины: в наших краях ветер меняет направление и скорость очень часто,можно и есть такое что улетаешь против ветра и также возвращается. А основная причина PitLab более правильный автопилот. Не один Сергей на нем летает,посмотрите тех видео у других. Еще про преобразователь DC-DC,он дает помехи,поставил его на питание камеры и на АП 0 спутников и на видео помехи,отодвинул подальше- чуть получше,заменил на обычный БЕК с фер. кольцом и все норм.
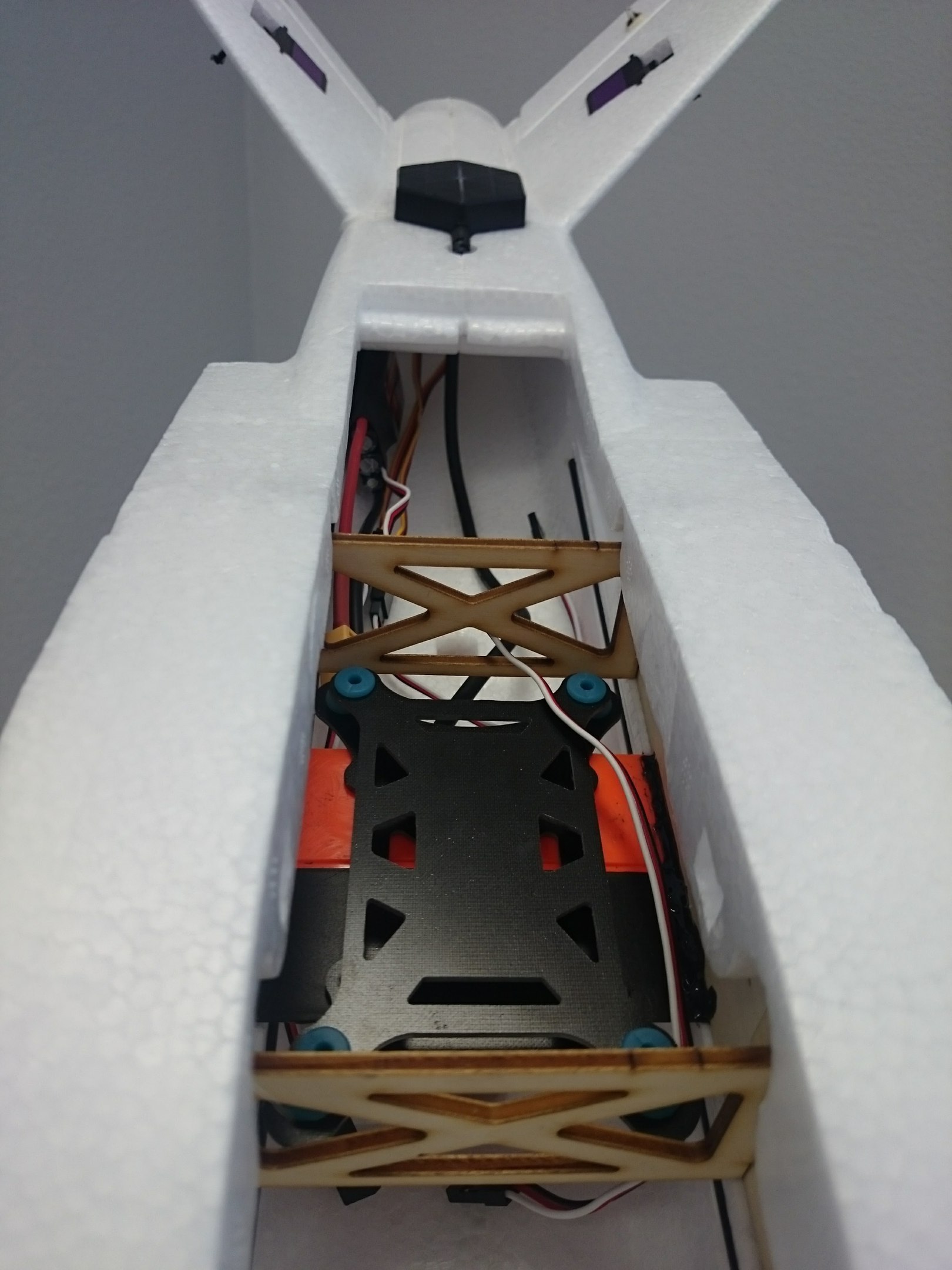
Друзья, собираю потихоньку своего Талона. На mini APM pro. В связи с этим возникли некоторые вопросы:
- Соорудил из текстолита простейшую PDB. Регуль хоббивинг 50А с беком 5А, достаточно ли его для питания серв? Или пустить на PDB отдельный BEC(чтоб при выходе регуля из строя осталось хотя бы управление), правда под рукой только BEC на 3А.
- Если размещать GPS между хвостовым оперением, то кабель до контроллера так или иначе будет идти параллельно силовому кабелю. Смотрю, у многих GPS там же. Нужно ли экранировать/вешать феррит на силовой кабель?
Ну и пару фото, может делаю что-то неправильно.


- достаточно. сервы от силы по 1 амперу жрут, а у тебя их 4.
- не вешал и не экранировал. все равно сигнал идет по цифровой шине
на счет сборки - не понимаю, зачем на телона видео 5.8 ставить. ему же этого мало. 5.8 - это полетать рядом с собой, а телоном рядом с собой просто не интересно рулить