Mini Talon - носитель Fpv

Cрезал с закруглением, ну чтобы форму предать:)
Как Сергей писал-тонкая часть остаётся. Я взял карбоновую полосу 10х0,5мм, параллельно 5 штук и наклеил на єто место. Получилась своеобразная лыжа. И нос усилил и скользкая она.
Посадок 20 уже сделал в таком исполнении, пока всё хорошо.
Напишу может и глупости, сильно не судите, в этой части я профан.
Поставил новый двигатель, не впечатлён.
Ближе к вопросу, может и не двигатель виноват.
Итак, например, я хочу, чтобы самолет, при скорости(воздушной) 60 км\ч летел горизонтально. Для этого я тримирую РВ и когда он у меня при стабилизации(без удержания высоты) летит горизонтально и при переключении на ручку тоже высота не изменяется - значит я “на коне” 😃
Так на старом движке и было, поставил новый двигатель, плюс по многим рекомендациям в теме сдвинул ЦТ практически на 55мм. Думал, стабильнее будет, не тут то было, стабильнее на глаз не стало, зато сильно проявилось пикирование, и если раньше при скорости 55-60км\ч самолёт летел горизонтально, то сейчас уже нужно 70км\ч. Естественно, энергопотребление выросло за счёт движка(тока) и РВ в режимах со стабилизацией.
Хочу уйти обратно на 60мм ЦТ, РВ по моим ощущениям встанет в ноль при 60км\ч и жрать движок должен меньше.
На днях пересматривал полёт Константина на дальность, он там держит скорость 40-50км\ч, то есть я так понимаю, чтобы снизить энергопотребление.
Тоже с такой проблемой столкнулся.
Поставил центровку на 55-56мм и самолет стал резко пикировать вниз (без руля градусов на 15-20 ныряет вниз).
Вес около 1600, 3S, 2836 x 1500kv, 9x6APC.
Поставил центровку на 55-56мм и самолет стал резко пикировать вниз
а какая была? 76мм, как в мануале?
Понимаю, что вопрос не мне, но у меня была изначально примерно 63мм, на скоростях выше 60км\ч самолёт медленно набирал высоту. Позарился 😃 на видео Сергея и решил сделать более переднюю. Но офигенно это стабильности не добавило(по видео не видно), но резко проявило пикирующий момент. РВ при такой центровке(63мм) стоял практически в нуле. Я думаю, что стабильность это всё же заслуга автопилота и высоты полёта.
Ну а если есть пикирование, то автопилоту это приходится исправлять тягой двигателя и РВ, что приводит естественно к увеличению энергопотребления.
Почему у Плохиша маленькое энергопотребление при 55мм даже не знаю.
На днях пересматривал полёт Константина на дальность, он там держит скорость 40-50км\ч, то есть я так понимаю, чтобы снизить энергопотребление.
Мне кажется там АП подвирает с воздушной скоростью. Талон не будет лететь горизонтально на 40-45 кмч. Только с потерей высоты. В остальном у тебя все верно.
там АПМ и врал летел я с приличным встречным ветром, даже слегка боковым. вон в крайней точке удаления наземная скорость упала до 25 км/ч, а как только завернулся, самолет легко пошел под 100км/ч
с приличным встречным ветром, даже слегка боковым.
Костик , это как так))) приличный ветер и слегка боковой)? Одновременно что ли два разных течения ?
по диагонали
вообще в таких полетах сложно что-то говорить о направлении ветра, т.к. в зависимости от расстояния и высоты меняются и сила и направление
наземная скорость упала до 25 км/ч,
а как только завернулся, самолет легко пошел под 100км/ч
Значит 70-75 км/ч воздушная , при условии постоянного тока до и после разворота.
Значит 70-75 км/ч воздушная
62,5 км/ч
а какая была? 76мм, как в мануале?
Где-то так, не помню точно, нужно мерить…маркером метка стоит
Мне кажется там АП подвирает с воздушной скоростью. Талон не будет лететь горизонтально на 40-45 кмч. Только с потерей высоты. В остальном у тебя все верно.
У меня летит на руках. Если необходимо можно и АП настроить и будет лететь.
Я думаю, что стабильность это всё же заслуга автопилота и высоты полёта.
Я тоже так думаю. Тоже "поигрался"с Ц.Т. ,поставил другой ак. ,Ц.Т. оказался по сервоканалам. Два взлета с большим левым креном и просадкой,в полете и на посадке нормально,но скорость больше и чувствовалось что его тянет в пике,посадка тоже на бОльшей скорости. Свинцом перетащил Ц.Т. на 55мм и полетел нормально. Расход емкости батарей самый маленький был 103mah,меньше никак. Причины: в наших краях ветер меняет направление и скорость очень часто,можно и есть такое что улетаешь против ветра и также возвращается. А основная причина PitLab более правильный автопилот. Не один Сергей на нем летает,посмотрите тех видео у других. Еще про преобразователь DC-DC,он дает помехи,поставил его на питание камеры и на АП 0 спутников и на видео помехи,отодвинул подальше- чуть получше,заменил на обычный БЕК с фер. кольцом и все норм.
Друзья, собираю потихоньку своего Талона. На mini APM pro. В связи с этим возникли некоторые вопросы:
- Соорудил из текстолита простейшую PDB. Регуль хоббивинг 50А с беком 5А, достаточно ли его для питания серв? Или пустить на PDB отдельный BEC(чтоб при выходе регуля из строя осталось хотя бы управление), правда под рукой только BEC на 3А.
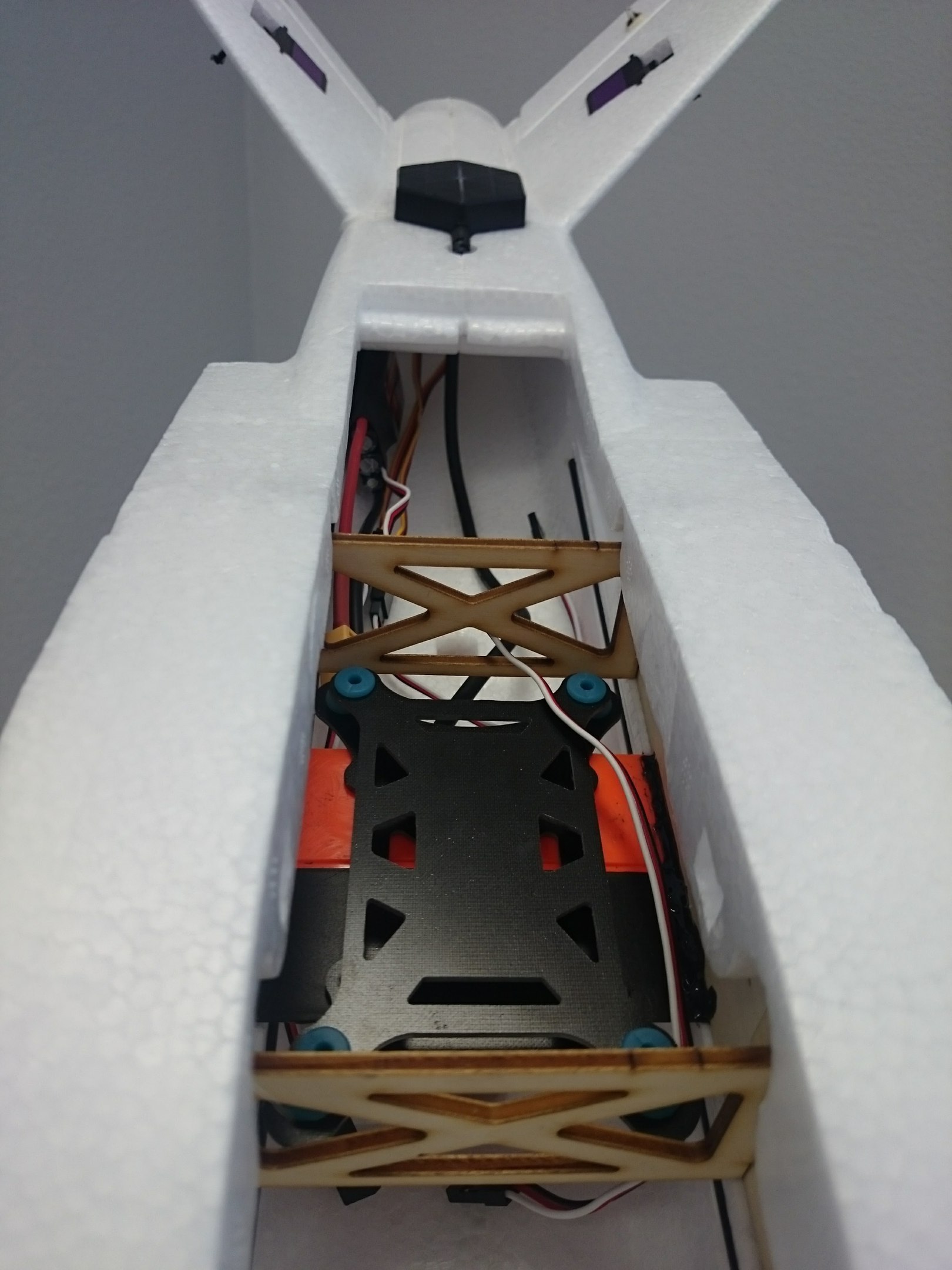
- Если размещать GPS между хвостовым оперением, то кабель до контроллера так или иначе будет идти параллельно силовому кабелю. Смотрю, у многих GPS там же. Нужно ли экранировать/вешать феррит на силовой кабель?
Ну и пару фото, может делаю что-то неправильно.


- достаточно. сервы от силы по 1 амперу жрут, а у тебя их 4.
- не вешал и не экранировал. все равно сигнал идет по цифровой шине
на счет сборки - не понимаю, зачем на телона видео 5.8 ставить. ему же этого мало. 5.8 - это полетать рядом с собой, а телоном рядом с собой просто не интересно рулить
Регулятор очень с зади, потом в центровку не попадете. Корпус ЖПС очень монументален но излишен. Вырежте пену если необходимо в штатном месте и с верху скотчем. Провода до рега стараються сделать короче, от рега к мотору как получиться. Как раз силовые не сойдуться с жпс, но им пофиг.
зачем на телона видео 5.8 ставить. ему же этого мало
Согласен, но изначально планировался самолет для полетов в АВТО. Миссию составил, швырнул. Если нужно, ардупилот в нужных координатах сделал фото, ну или видео всего маршрута (наблюдение за линейными объектами в целях облегчения труда). А т.к. опыта по самолетам у меня нет, только коптеры и ЛК низко-близко, то решил начать с 5.8. На пару километров должно хватать. А если зацепит, то перейду на 1.2))
Корпус ЖПС очень монументален но излишен
Уже врезался в пену)) буду углублять.
Провода до рега стараються сделать короче
Нарастить не проблема, благо, на мотораме гайки. Если не попаду, то обязательно займусь наращиванием. В коптерных темах не затихают споры о том, какие провода вреднее - до регулятора или после. Пока что ничья)))
А я думал наши победили.😃 если батарея не более 6-7 А а на носу не более того что есть то в центровку не попадете. Разложить оборудование и прикинуть центровку уже сейчас можно.
В носу будут 2 по 4200 3s, для начала. Возможно, отдельная на видео будет. Если не попаду, то на нос писалку воткну. Ещё 2 подвеса двухосевых пылятся.
Видеокамера будет показывать сверху полнеба, а снизу нос самолёта 😃
Да, видимо так. Под подвес присматривался к рэйнжеру, но талон одержал уверенную победу в номинации зрительских симпатий)) а для наблюдений камеру планировал в брюхо поставить, объективом вниз, на виброразвязке. Что-то типа мыльницы кэнон с chdk. Чтоб кабель смастерить и полетником управлять. Там требования небольшие
на носу не более того что есть то в центровку не попадете
Накинул крылья. Без полетника, модуля питания и телеметрии. ЦТ в 48мм от кромки крыла - по переднему шву вклейки (акки в самом носу). Недостающее накинул сверху - получил вес 1650 грамм. Не хватает только трубки Пито (на таможне застряла).

Видеокамера будет показывать сверху полнеба, а снизу нос самолёта 😃
У меня мобиус в носу нормально показывает, рашпилем немного доработать надо. Видео недавно выкладывал.