Twin Dream перспективная новинка

Все страннее и страннее становится эта история! Как мы знаем по коптерам, для 2216 - винт десятка это самый низ. Обычно 11-12 на них ставят? что получить оптимальную эффективность.
3110 470 kv у меня на коптере крутят 15е!!! винты, при этом на 4S. И при том, что на коптере мы летаем на 50% газа и выше. А на самолете 50% и ниже.
Другими словами сетап вашего друга должен быть даже менее эффективен чем на 2216, потому что моторы оверкилл по мощности + лишний вес, и работают на самых низких неэффективных оборотах. Подскажите другу, что если он поставит 12е винты, то сможет взлетать вертикально вверх с места. Удобно - бросать не нужно. Тяга получается, больше трех килограмм, на таком сетапе!
…3110 470 kv у меня на коптере крутят 15е!!! винты, при этом на 4S…
Получается, есть возможность сделать тест, можно для начала проверить на стенде. С винтом 10х6 и 6S.
Знакомый говорил про 2,5-3,5А в полёте, получается на один в среднем 1,5А, чтобы летела модель.
Дать такой ток и посмотреть статическую тягу. Сравнить с 2216 и 4S (3,5А на один мотор). Конечно статическая отличается от полёта, но можно понять примерно эффективность.
Я лично думаю, не просто так знакомый заменил моторы и перешёл на Li-ion 6S, значит результат больше понравился. Были сомнения на счёт"kv", сказал- досталось в наследство от разбитого коптера, специально не покупал с нужным kv ( 500-600).
У меня самодельный планер, схожими характеристиками летаю на 4S, пока нет возможности перейти на 6S (нет подходящей начинки).
Погода дрянь… Но MTD красавчег! 😃
Постабильнее Талона?
Не знаю Сань, летал то ещё только пару раз, присматриваюсь…
Да и для меня как то понятие стабильности оно какое то призрачное…
Я считаю что практически нет разницы между самолётами в болтанку и ветер…
Я тут с тобой согласен, и особенно с автопилотом.
Наверное, можно сравнивать только эффективность полета, и то с большим Талоном.
Управляемость и стабильность оценить можно только в ручном режиме.
Прикольно 😃

А мой твин сегодня последний свой полет отлетал…
В чём причина?
Судя по тому, что одновременно пропадает и RSSI и отключается режим стабилизации - косяк в файлсэйве.
На файлсайв у меня был настроен принудительный автовозврат. А я накануне как раз каналы LRS перенастраивал чуток. Процедуру настройки файлсайва выполнил. Но судя по всему, когда ее выполнял, недовключил тумблер (трехпозиционник) на пульте…
Вот такой нелепый косяк!..
При этом, я когда взлетел, первым делом автовозврат с тумблера проверил - все работало… Вот и полетел спокойно, а тут…
Самолет удалось найти? Был GSM трекер на борту?
Обидно… Нашёл?
Координаты на наземной писалке были зафиксированы. Плюс маячок работал когда ближе к месту добрался…



Уххххххххххххх… Жалко (((((((
Наше хобби ошибок не прощает!..
Как говорит мой хороший знакомый - все, что летает, рано или поздно падает!
Как говорит мой хороший знакомый - все, что летает, рано или поздно падает!
Это не совсем правильно.
Отремонтируется это. Причем не долго.
разбавим тему
Сегодня, после долгого перерыва, дураку припёрло полетать не на одной, а на двух батареях!
кликабельно
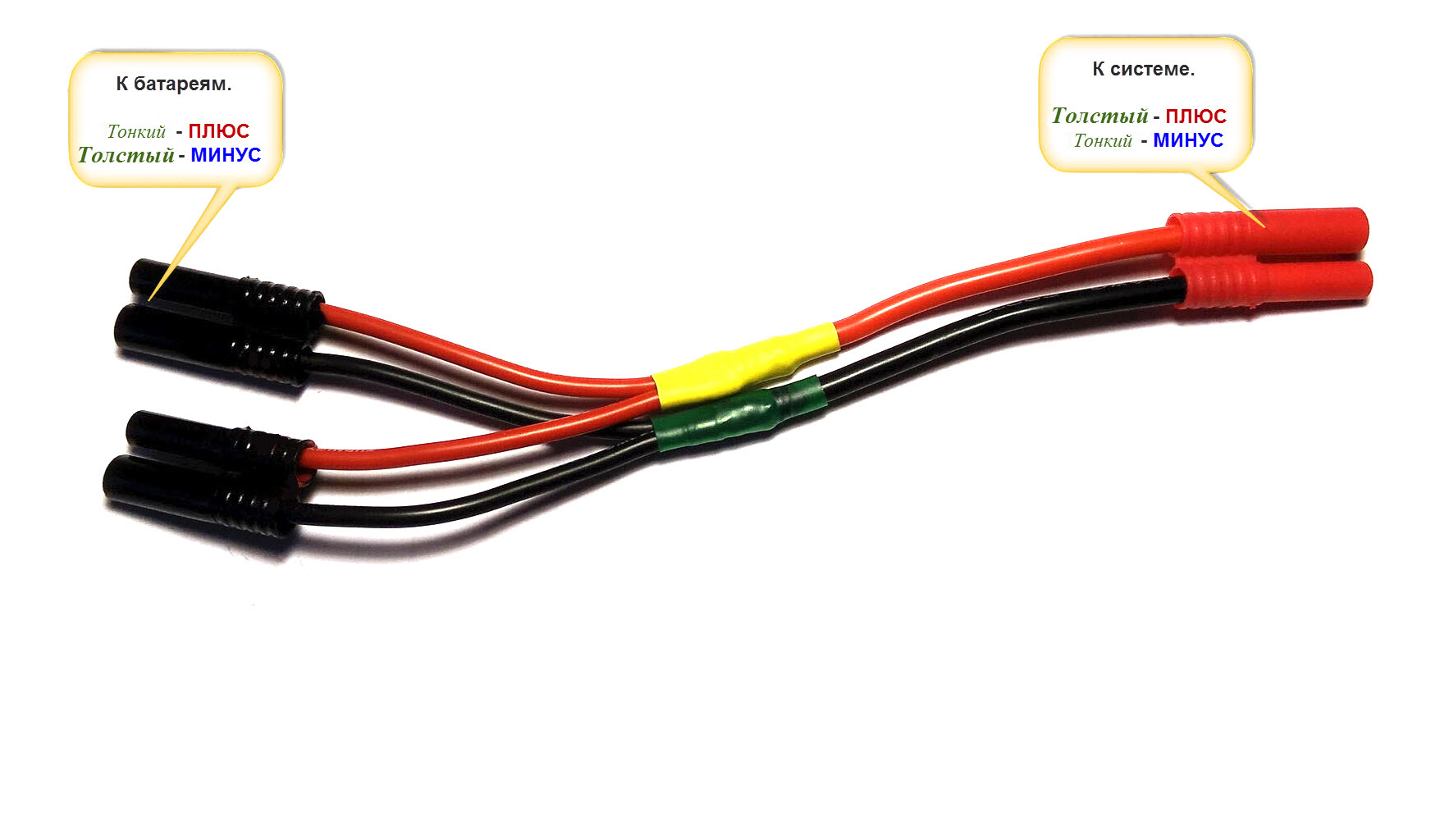
Сделал параллельный соединитель, приехал на поле, и как лох всунул в одну батарею левый разъём, а второй левый засунул в систему… 😦
и ведь знал же, что надо быть аккуратнее… Эх…
пока в минусе один регулятор (что не так страшно) и датчик тока Питлаб… Вот его родимого нету … придётся ждать…
левые разъёмы теперь покрасил…
Да уж, закон Мерфи в действии:
«Если существуют два способа сделать что-либо, причём один из них ведёт к катастрофе, то кто-нибудь изберёт именно этот способ»😦
У нас такой тройник из xt-60 сделан.
Ну так если батарейки все на таких как на картинке, куда там xt-60 приделывать?
Уж то что есть…