Автопилот iNav полёты с GPS

из всего из этого я вынес следующее
попробовать отпаять сервы от 3 и 4 пвм (что бы не мешали) поставить коптерный конфиг и посмотреть какой будет результат…
Оставт эти хелли…поставьте самый простой самолетный esc -и выставьте простой протокол.
Подайте 5 вольт с наружи на 2ю дорожку рядом с пинами на сервы.
регули пробовал всякие от простых до всего что есть валялись старенькие рабочие 12А и они не ожили … правда когда подаешь питание они с движками издают характерное пилик пилик 😃
протоколы то же самое
вот по поводу 5 вольт на дорожку я не понял для чего это?
я подключил сервы через внешний стабилизатор на 5 вольт но питание стабилизатора взял после датчика тока на контроллере
я ни землю ни питание не задействовал на контролере там где у меня пвм три дорожки
калибровать обязательно? (хотя и калибровка не помогла сильно)
Жутко извиняюсь, поскольку дилетант,только начинаю разбираться с INAV, но вдруг. Калибровали через Конфигуратор? Несколько дней назад столкнулся с подобной проблемой. Не запускался один двигатель, калибровка через сервотестер ничего не дала, а вот с помощью конфигуратора все заработало.
как написано выше я это пробовал
здесь какой то косяк либо в прошивке либо в моём железе
я пробовал на голую прошивку без перефирии запустить движок … увы безрезультатно
хотя мозг снял с работающего коптера там все 4 канала двиглов были задействованы и всё было ОК
а у вас миксы для крыла созданы?
Пробовали прибить дефолтные и создать снова?
спасибо всем …
решение найдено всё заработало
часть подсмотрел в новом видео у аника и пришлось движок поменять
и сервы пашут и двигло …
буду дальше собирать
спасибо всем …
решение найдено всё заработало
часть подсмотрел в новом видео у аника и пришлось движок поменять
и сервы пашут и двигло …
буду дальше собирать
в чем была проблема?
в чем была проблема?
Ета страшная тайна!
А если серьёзно, удивляет такое отношение людей… неужели непонятно, что кто то ещё может столкнуться с подобной проблемой?
да конечно
расскажу
во первых движок пока туда сюда паял … умер совсем… сегодня разберу посмотрю что с ним
во вторых у аника в видео посмотрел что я не правильно пресет выбирал
и у меня были не активны движки и сервы в айнаве …
когда торопишься и делаешь по сто раз одно и то же начинаешь делать ошибки … тупишь в простонародье
вчера просто вечером сел всё поотпаял … припаял всё заного … выяснилось о хвори движка … до этого работающего …
поставил бетафлай … проверил всё … всё работает … поставил айнав …
сделал всё по букварю… видео от аника
всё заработало
что ещё сказать? …
всё заработало
Короче отбой -ложная тревога 😃
Коллеги, такой вопрос: приехал мне полетничек matek f722 wing. До этого был matek f405 wing, поэтому взял ту же фирму. Начал настраивать его и теперь при подключении магнетометра пропадает встроенный в ПК баро. Я нарыл что это проблема моего GPS/магнетометра, там что то эмулирует нужный нам чип QMC5883L (а стоит по факту что то другое и подешевле, подделка короче) и по шине i2c все это перестает дружить с ПК.
Есть варианты выхода:
- Не использовать баро
- не использовать магнетометр
- Купить нормальный модуль GPS, что логично.
Раньше у меня работали все датчики, сейчас на время от чего то нужно отказаться, пока приедет нужный. Вроде вот этот?😃
www.mateksys.com/?portfolio=m8q-5883
На сколько критично пока летать без какого то одного датчика? Нужен ли вообще баро на крыле? Не хочется чтобы самолет не вернулся!
на летательных аппаратах с крылом, в первую очередь магнитометр никому не упёрся…
на летательных аппаратах с крылом, в первую очередь магнитометр никому не упёрся…
100%
Последние 3 жпс купил без компаса.( хотя есть 2 отд. компаса) -если приспичит -вынес подальше от железок и все)
Коллеги, подскажите пожалуйста. В последних прошивках обязательно вводить через CLI команды для защиты от дизарма или это уже пофиксили?
Спасибо за ответы! Сейчас нашёл на сайте матек что компас реально не используется с inav.
Вопрос владельцам f722 wing, подключил курсовую камеру в С1 по мануалу, в очки видео не идёт, только osd. А камера нагрелась сильно, не знаю сгорела или и раньше так тоже было. Эти переключения двух камер в новом ПК меня просто добивают. У меня пока пульт 6 каналов, с ним переключение настроить даже не могу по мурзилке, арррр!
Компас с айнав на самолетах используется, на f405wing. Через 3 месяца после установки полетника, обнаружил что комас стоит неправильно. До этого летал, все работало хорошо, но особенно в ветер шкала компаса становилась сама по себе. Установил его правильно, теперь показывает все точно, даже при полете хвостом вперед)
Приехали готовые модули-термодатчики на LM75A с маркировкой cjmcu-75. Хоть первоначально LM75 не понравились, решил обкатать их на Кесле. Поставил 2 штуки, один - на температуру атмосферы под крыло(чтоб солнце не влияло), второй на температуру ESC. У этих модулей их адрес задается пайкой перемычек на нижней стороне платы. У первого модуля A2 A1 A0 замкнул на массу, у второго - A2 A1 на массу, A0 на VCC. Если бы ставил третий датчик - там нужно было бы A2 и A0 на массу, A1 на VCC и т.д. (000 001 010 011 100 101 110 111 - 0…7). Подключил оба модуля параллельно друг другу и к i2C, питание дал 3.3V. Вбил в cli temp_sensor - inav их сам увидел и стандартно отконфигурировал. (если раньше были подключены другие термодатчики - автоконфигурации не будет, что бы она произошла - нужно изменить настройки термодатчиков на значения по умолчанию - с нулями). Изменил верхний тревожный предел с 60 градусов на 99 (поменял 600 на 999), добавил названия термодатчиков, эти названия будут отображаться в ОСД.
Подробное описание здесь.
# temp_sensor
temp_sensor 0 1 0 -200 999 ESC
temp_sensor 1 1 1 -200 999 ATMO
temp_sensor 2 0 0 0 0
temp_sensor 3 0 0 0 0
temp_sensor 4 0 0 0 0
temp_sensor 5 0 0 0 0
temp_sensor 6 0 0 0 0
temp_sensor 7 0 0 0 0
настроил все это дело в ОСД. Показывает целые значения, десятых долей нет. Длинна проводов до датчиков - 120 мм. Ошибок по i2C не появилось, погонял минут 20 - датчики не зависали. Посмотрим, как они себя в полетах покажут.
Inav 1.8 Крыло.
Связка альтитуд холд +позишен холд.
Нужно ли для работы этой связки наличие компаса на борту? Спасибо.
НУжен гпс и некоторая скорость. Магнитометр необязателен.
Нашел способ выводить данные с ардуиновских проектов в OSD iNAV.
В iNAV появилась поддержка термодатчиков DS18B20. Для ардуино есть библиотеки эмуляции 1 ware и датчика DS18B20. Ардуина эмулирует датчик DS18B20 и передает данные по 1 ware через DS2482-100 в iNav.
github.com/mikaelpatel/Arduino-OWI
github.com/mikaelpatel/Arduino-OWI/…/DS18B20.ino
Экспериментировал сегодня, iNAV данные с эмулятора DS18B20 жрет и выводит OSD как температуру. Развлекался с датчиками влажности. Ардуина была pro mini 328 5 16. Выводится значение до 999, т.е. три значащих цифры. Точки нет. Отрицательные значения тоже выводит, сколько - не проверял. В конце цифры - значок температуры, куда же без него, впрочем его в файлах шрифтов OSD можно подчистить или поменять.
В примере DS18B20.ino в строке 68 берутся показания напряжения с аналогового пина A0 и передаются в 1 ware в качестве показаний термодатчика. В эту самую переменную value и нужно пихать данные, которые хочется видеть в OSD. Только перед пиханием нужно умножить на 4, т.к. в ОСД отображается значение в 4 раза меньше отправленного.
В планах тахометр, индикатор напряжения на самой слабой банке АКБ, индикатор перегрузки и прочая экзотика…
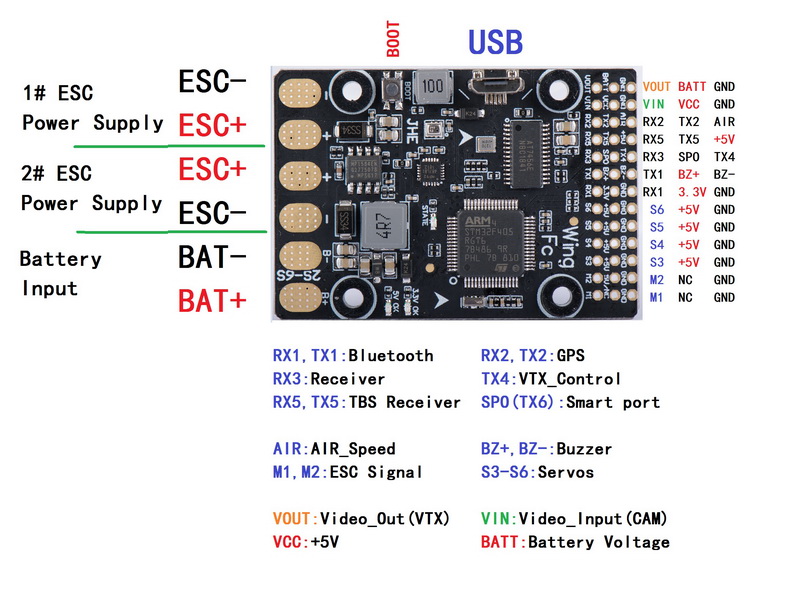
Ест вот такой полетник.
как на нем вырубить 5 вольт на серворазъемах?
не хочу от встроенного бека питать сервы, на регуле есть свой бек.
на пинах моторов М1 и М2 по умолчанию ничего не подключено, но можно запаять перемычку на 5 в шину, на которой висят сервы
но вопрос как раз в том, чтобы запитать сервы от бека регуля, не городя соплей.
но дорожки все покрашены а мануала на полетник не нашел
не хочу от встроенного бека питать сервы, на регуле есть свой бек.
Реально, простое решение - вытащить средний пин из разъёмов серв и питать отдельно и всё, грубо задача решена.
вытащить средний пин
но будут сопли 😃
хотя может и фиг с ними