Автопилот iNav полёты с GPS

Только если пилот это допустит.
Вот что за бред? Опять сову на глобус натягиваете?
Вот ветер, скорость которого больше скорости физически максимальной летательного аппарата. Хоть автопилот усреться, но он не сможет вернуть. Либо автопилот будет до последнего сопротивляться, пока аккумулятор не выдохнется, либо начнет автопосадку, если такое предусмотренно, чтобы далеко не улететь.
Вот что за бред? Опять сову на глобус натягиваете? Вот ветер, скорость которого больше скорости физически максимальной летательного аппарата. Хоть автопилот усреться, но он не сможет вернуть. Либо автопилот будет до последнего сопротивляться, пока аккумулятор не выдохнется, либо начнет автопосадку, если такое предусмотренно, чтобы далеко не улететь.
Вы действительно не понимаете?
Вполне очевидно что можно разменять высоту на скорость. Далее - в нашей местности типично скорость ветра на высоте выше километра(уровень гор) и 300м отличается в разы.
Аппарат будет снижаться, в соответствии с настройками, летя в автоматическом режиме.
Или при наличии управления пилот сбросит высоту. При ручном управлении имение работающего компаса позволит держать направление автоматически, не отвлекаясь на это.
Вы действительно не понимаете?
Вполне очевидно что можно разменять высоту на скорость. Далее - в нашей местности типично скорость ветра на высоте выше километра(уровень гор) и 300м отличается в разы.
Аппарат будет снижаться, в соответствии с настройками, летя в автоматическом режиме.
Или при наличии управления пилот сбросит высоту. При ручном управлении имение работающего компаса позволит держать направление автоматически, не отвлекаясь на это.
Отключаем компас и в CLI прописываем set nav_fw_allow_manual_thr_increase = ON. Тогда при сильном ветре в автоматическом режиме ( например RTH) добавляем газу столько, сколько надо для полёта в этих условиях и работы курса по GPS. А если уж совсем ураган дует и самолёт не может лететь вперёд, то будет компас задействован или нет- роли не играет, домой самолёт не долетит…
Вы действительно не понимаете?
Да-а-а, ваш опыт полётов в ветер столь тонок, что его просто не видно. 😆
Веруйте в свой “волшебный компас, который спасёт” и дальше (до первого борта, улетевшего от вас хвостом вперёд) - вера дело личное. 😃
Отключаем компас и в CLI прописываем set nav_fw_allow_manual_thr_increase = ON. Тогда при сильном ветре в автоматическом режиме ( например RTH) добавляем газу столько, сколько надо для полёта в этих условиях и работы курса по GPS.
Угу. Аналогичный режим есть и в ардуплейне (причём по дефолту). Но некоторые “адепты святого компаса” про это, видимо, не в курсе 😁
Но можно понадеяться что летишь в авто режиме и ненароком вырубить мотор,если опустить стик в 0)
Но можно понадеяться что летишь в авто режиме и ненароком вырубить мотор,если опустить стик в 0)
там есть слово increase
можно добавить. Убавить нельзя.
Но можно понадеяться что летишь в авто режиме и ненароком вырубить мотор,если опустить стик в 0)
Так это всегда можно, если включена функция motor_stop (в арду аналогично) - безотносительно к вышеописанному режиму увеличения круизного газа.
Коллеги, очень нужен конфигуратор версии 2.2.1!
Может у кого сохранился архив?
Ну так с гитовских релизов скачайте - там же, где и все остальные версии 😁
доброй ночи. а где можно спросить про полетник F411 -wing. совсем не подает признаки жизни…
Коллеги, очень нужен конфигуратор версии 2.2.1!
Вполне очевидно что можно разменять высоту на скорость. Далее - в нашей местности типично скорость ветра на высоте выше километра(уровень гор) и 300м отличается в разы.
А вот нету высоты, дальше деревья. Вот что делать?
доброй ночи. а где можно спросить про полетник F411 -wing. совсем не подает признаки жизни…
Тоесть при подключении к компу ничего не горит? Или комп не определяет?
Для начала отпаяйте всё от полетника, проверьте тестером на коротыши, посмотрите datasheet проца и проверьте доходит ли до него 3,3 вольта или сколько ему там надо. Короче с тестером поиграйтесь.
Можно подключить к компу и потрогать пальцем плату и узнать что где сильно греется, возможно в этом и есть проблема.
Цитата Сообщение от schs Посмотреть сообщение Вполне очевидно что можно разменять высоту на скорость. Далее - в нашей местности типично скорость ветра на высоте выше километра(уровень гор) и 300м отличается в разы. А вот нету высоты, дальше деревья. Вот что делать?
Слишком общее предположение. Обычно я дальние миссии заранее планирую, с учётом рельефа, предполагаемого направления и силы ветра.
Т.е. при прохождении миссии высота выбирается минимально возможная, чуть выше рельефа местности.
чуть выше рельефа местности.
И как вы тогда разменяете высоту на скорость? На подземную? 😃
Обычно я дальние миссии заранее планирую, с учётом рельефа, предполагаемого направления и силы ветра.
И таки нахрена вам тогда компас? Или вы “планируете” миссию именно с расчётом на полёт “хвостом вперёд”? 😁
Друзья снова задам вопрос и попрошу разъяснения, может я не догоняю что и как. Задавал вопрос раньше по контроллеру SpeedyBee F4 и inav 2.5.2, не корректно работает ESC, ни один из протоколов. Версия 2.4 все нормально. Так вот на странице релизов (github.com/iNavFlight/inav/releases), заявляется поддержка SpeedyBee F7, но в таргетах его нет… Может просто ошибка в названии hex файла и я шью прошивку для F7 на F4 и из-за этого глюки? Не разобрался куда и что писать в багрепорт
Может просто ошибка в названии hex файла и я шью прошивку для F7 на F4 и из-за этого глюки?
Если залить в F4 хекс, скомпилированный под F7, микроконтроллер тупо не стартанёт (точнее, улетит в hard fault). Т.е. для пользователя полётник просто не будет подавать признаков жизни.
И таки нахрена вам тогда компас?
А никто толком объяснить не может.
Братцы ну никак я без вас) настраиваю новое крыло и как бы все логично и понятно , ан нет элевоны отрабатывают по ролу корректно, а вот по питчу требуется оному сделать инверт. делаю и “больной” перестает вообще рулить по питчу.
Прошу прощения регуль пока не настроен пищит противно)
Братцы ну никак я без вас) настраиваю новое крыло и как бы все логично и понятно , ан нет элевоны отрабатывают по ролу корректно, а вот по питчу требуется оному сделать инверт. делаю и “больной” перестает вообще рулить по питчу.
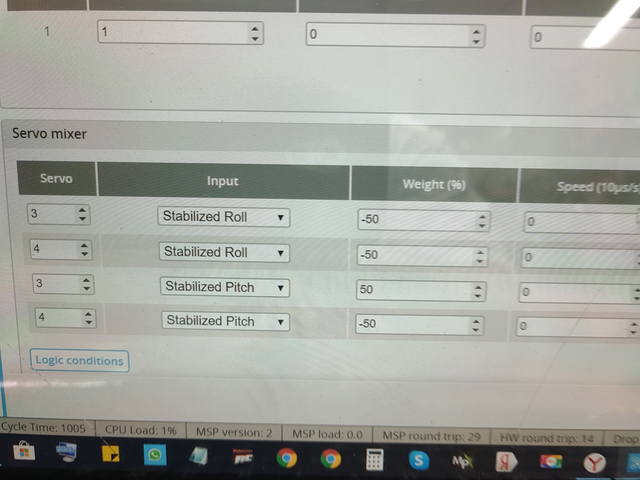
По видео не очень понятно что у вас в миксах настроено но рискну предположить что неправильно)
должно быть примерно так, естественно в случае если в пульте никаких инверсий нет
servo 3 stabilized Roll 50
servo 3 stabilized Pitch 50
servo 4 stabilized Roll -50
servo 4 stabilized Pitch 50
Сделал как вы написали ,получился вообще ералаш, но на другом крыле это работает нормально. Одной серве я делал реверс внутри сервы , и если бы я накосячил она бы не работала. Сейчас когда один елевон не поднимается по питчу миксы такие