Автопилот iNav полёты с GPS

Вы действительно не понимаете?
Вполне очевидно что можно разменять высоту на скорость. Далее - в нашей местности типично скорость ветра на высоте выше километра(уровень гор) и 300м отличается в разы.
Аппарат будет снижаться, в соответствии с настройками, летя в автоматическом режиме.
Или при наличии управления пилот сбросит высоту. При ручном управлении имение работающего компаса позволит держать направление автоматически, не отвлекаясь на это.
Отключаем компас и в CLI прописываем set nav_fw_allow_manual_thr_increase = ON. Тогда при сильном ветре в автоматическом режиме ( например RTH) добавляем газу столько, сколько надо для полёта в этих условиях и работы курса по GPS. А если уж совсем ураган дует и самолёт не может лететь вперёд, то будет компас задействован или нет- роли не играет, домой самолёт не долетит…
Вы действительно не понимаете?
Да-а-а, ваш опыт полётов в ветер столь тонок, что его просто не видно. 😆
Веруйте в свой “волшебный компас, который спасёт” и дальше (до первого борта, улетевшего от вас хвостом вперёд) - вера дело личное. 😃
Отключаем компас и в CLI прописываем set nav_fw_allow_manual_thr_increase = ON. Тогда при сильном ветре в автоматическом режиме ( например RTH) добавляем газу столько, сколько надо для полёта в этих условиях и работы курса по GPS.
Угу. Аналогичный режим есть и в ардуплейне (причём по дефолту). Но некоторые “адепты святого компаса” про это, видимо, не в курсе 😁
Но можно понадеяться что летишь в авто режиме и ненароком вырубить мотор,если опустить стик в 0)
Но можно понадеяться что летишь в авто режиме и ненароком вырубить мотор,если опустить стик в 0)
там есть слово increase
можно добавить. Убавить нельзя.
Но можно понадеяться что летишь в авто режиме и ненароком вырубить мотор,если опустить стик в 0)
Так это всегда можно, если включена функция motor_stop (в арду аналогично) - безотносительно к вышеописанному режиму увеличения круизного газа.
Коллеги, очень нужен конфигуратор версии 2.2.1!
Может у кого сохранился архив?
Ну так с гитовских релизов скачайте - там же, где и все остальные версии 😁
доброй ночи. а где можно спросить про полетник F411 -wing. совсем не подает признаки жизни…
Коллеги, очень нужен конфигуратор версии 2.2.1!
Вполне очевидно что можно разменять высоту на скорость. Далее - в нашей местности типично скорость ветра на высоте выше километра(уровень гор) и 300м отличается в разы.
А вот нету высоты, дальше деревья. Вот что делать?
доброй ночи. а где можно спросить про полетник F411 -wing. совсем не подает признаки жизни…
Тоесть при подключении к компу ничего не горит? Или комп не определяет?
Для начала отпаяйте всё от полетника, проверьте тестером на коротыши, посмотрите datasheet проца и проверьте доходит ли до него 3,3 вольта или сколько ему там надо. Короче с тестером поиграйтесь.
Можно подключить к компу и потрогать пальцем плату и узнать что где сильно греется, возможно в этом и есть проблема.
Цитата Сообщение от schs Посмотреть сообщение Вполне очевидно что можно разменять высоту на скорость. Далее - в нашей местности типично скорость ветра на высоте выше километра(уровень гор) и 300м отличается в разы. А вот нету высоты, дальше деревья. Вот что делать?
Слишком общее предположение. Обычно я дальние миссии заранее планирую, с учётом рельефа, предполагаемого направления и силы ветра.
Т.е. при прохождении миссии высота выбирается минимально возможная, чуть выше рельефа местности.
чуть выше рельефа местности.
И как вы тогда разменяете высоту на скорость? На подземную? 😃
Обычно я дальние миссии заранее планирую, с учётом рельефа, предполагаемого направления и силы ветра.
И таки нахрена вам тогда компас? Или вы “планируете” миссию именно с расчётом на полёт “хвостом вперёд”? 😁
Друзья снова задам вопрос и попрошу разъяснения, может я не догоняю что и как. Задавал вопрос раньше по контроллеру SpeedyBee F4 и inav 2.5.2, не корректно работает ESC, ни один из протоколов. Версия 2.4 все нормально. Так вот на странице релизов (github.com/iNavFlight/inav/releases), заявляется поддержка SpeedyBee F7, но в таргетах его нет… Может просто ошибка в названии hex файла и я шью прошивку для F7 на F4 и из-за этого глюки? Не разобрался куда и что писать в багрепорт
Может просто ошибка в названии hex файла и я шью прошивку для F7 на F4 и из-за этого глюки?
Если залить в F4 хекс, скомпилированный под F7, микроконтроллер тупо не стартанёт (точнее, улетит в hard fault). Т.е. для пользователя полётник просто не будет подавать признаков жизни.
И таки нахрена вам тогда компас?
А никто толком объяснить не может.
Братцы ну никак я без вас) настраиваю новое крыло и как бы все логично и понятно , ан нет элевоны отрабатывают по ролу корректно, а вот по питчу требуется оному сделать инверт. делаю и “больной” перестает вообще рулить по питчу.
Прошу прощения регуль пока не настроен пищит противно)
Братцы ну никак я без вас) настраиваю новое крыло и как бы все логично и понятно , ан нет элевоны отрабатывают по ролу корректно, а вот по питчу требуется оному сделать инверт. делаю и “больной” перестает вообще рулить по питчу.
По видео не очень понятно что у вас в миксах настроено но рискну предположить что неправильно)
должно быть примерно так, естественно в случае если в пульте никаких инверсий нет
servo 3 stabilized Roll 50
servo 3 stabilized Pitch 50
servo 4 stabilized Roll -50
servo 4 stabilized Pitch 50
Сделал как вы написали ,получился вообще ералаш, но на другом крыле это работает нормально. Одной серве я делал реверс внутри сервы , и если бы я накосячил она бы не работала. Сейчас когда один елевон не поднимается по питчу миксы такие 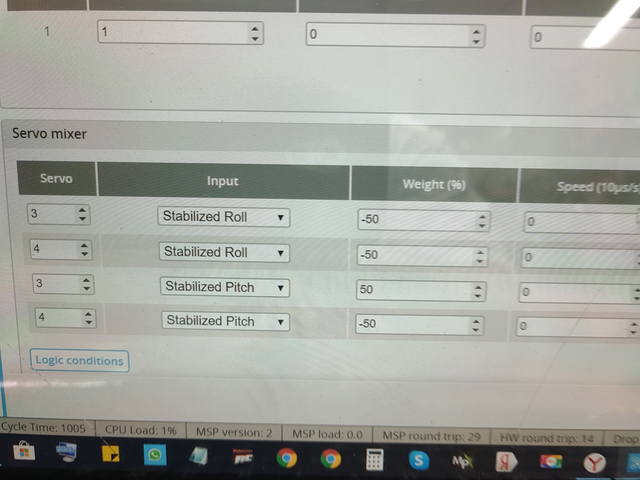
Вам мистел ответил верно.
Первое -убрать все что накосячино в аппе -ее не трогают вобще.
Затем сзади глядим на крыло -3я слева - 4я справа.
С вкладки стабилизации -что на фото -уходим.Делаем правильные миксы в айнаве вначале при ручном управлении стиками.
Затем стабилизация -первые две строки -стабилизация по ролу.
ЛОГИЧНО что они должны быть с разными знаками) одна серва вверх - другая вниз.
2 посл. строки -стабилизаци по питчу.
3я и 4я сервы должны быть с одинаковым знаком.(нос крыла вниз -обе сервы поднимают элевоны . Нос крыла вверх -обе опускают.)
Ну хорошо давайте по пунктам, в пульте проверил все чисто , никаких миксов контрольных точек и т д.
Остальнык пункты сливаются в один, если элевоны работают не верно, но работают и мы делаем одному инверт , он должен сменит направление, а он перестает работать СОВСЕМ и причем здесь стабилизация. сейчас загружу ролик по вкладкам