Автопилот iNav полёты с GPS

Подскажите, как выключить сигнал о потере связи? Летаю на дальняк по маршруту, в настройках прописал выполнение маршрута при потере связи и получается, что самолёт летит и пищит постоянно, пока не вернётся на расстояние где есть связь с пультом. В настройках поискал- не нашёл, только сигнализация по остатку батареи… Может в CLI можно командно отключить?
Павел сообщает о возможном Фулл Чип Эрейз при сохранении настроек когда что то настраивал через комп
Осваиваю настройки INAV 3.0:
По умолчанию в настройках стоит 270 градусов у магнитрометра. Если я ставлю компас по стрелке к носу самолета - то мне нужно этот параметр поставить в 0 градусов? (Компас, GPS - Radiolink ts100. FC - Matek F405 Wing).
И еще вопросик, можно ли сделать переключение полетных режимов “по кругу” щелканьем одного тумблера на аппаратуре (QX-7)
Доброго всем дня!
Есть ПВД (трубка Пито) aspd-7002 от Матека. В прошлом году на 2.4 работала нормально. В этом решил поставить 3.0 и заметил что в покое показывает приборную скорость на 20км/ч, также в полете она на 20 км/ч выше. Почитал даташит, датчик оказывается аналоговый, полетник (f722-wing) делает АЦП и дает показания в OSD. Ну и недолго думая воткнул в цепь сигнала подстроечник на 10кОм. Дома настроил на 0 показания и поехал в поле. В итоге на земле 0, а в полете на 20 км/ч больше фактической. Я так понял, что я не сдвинул напряжение идущее к АЦП подстроечником, а масштабировал (растянул). Может кто сталкивался, или есть какие-нибудь идеи как можно сдвинуть напряжение сигнала без масштабирования? Доброго неба всем!
Никогда с этими трубками не работал, но может есть клибровка 0 для этой трубки.
есть ещё какая то настройка типа set pitot_lpf_milli_hz = 350.
Ну и на всякий отшить на 2.4 и убедится что продолжает работать как надо. А то может сам датчик решил дуба дать.
Дома настроил на 0 показания и поехал в поле. В итоге на земле 0, а в полете на 20 км/ч больше фактической. Я так понял, что я не сдвинул напряжение идущее к АЦП подстроечником, а масштабировал (растянул).
Судя по тому, что на земле 0 - Вы всё же сдвинули ноль. Теперь надо масштабировать pitot_scale, по умолчанию 1.0 можно менять от 0 до 100. Удачи.
P.S. Надеюсь в iNAV ещё не успели автокоррекцию воздушной скорости из арды втянуть 😃
.
Теперь надо масштабировать pitot_scale, по умолчанию 1.0 можно менять от 0 до 100. Удачи.
Спасибо! Что-то получается, показания изменились. Буду пробовать в небе)
Что-то получается, показания изменились.
iNAV калибрует (запоминает напряжение) “ноль” аналогового датчика Пито при старте прошивки. Аналоговый датчик имеет на выходе напряжение от 0,5 до 4,5 В с “нулём скорости” в районе 2,5 В, а АЦП STM-ки имеет рабочий диапазон от 0 до 3.3 В, поэтому в iNAV программно заложено, что аналоговый Пито подключается через резисторный делитель “пополам” (номиналы резисторов 1:1) - соответственно, пересчёт напряжения в давление (которое потом пересчитывается в скорость) выполняется именно по “половинному” коэффициенту - посмотрите вот эти определения: github.com/iNavFlight/inav/…/pitotmeter_adc.c#L37 и текст вот этой функции github.com/iNavFlight/inav/…/pitotmeter_adc.c#L53
Таким образом, подстроечник будет давать откровенный бред - нужно ставить делитель 1:1 и предохранять воздуховоды датчика от порывов ветра во время калибровки при старте прошивки, а ещё лучше перед взлётом делать программный ребут прошивки, так как датчик успеет нагреться, отчего его показания “поплывут”.
set pitot_lpf_milli_hz
Вы бы почитали описание параметра, если из названия не можете понять его смысл - к масштабным коэффициентам он никаким боком не относится, это просто параметр “сглаживания” значений воздушной скорости: github.com/iNavFlight/inav/blob/…/pitotmeter.c#L19…
pitot_scale
Насколько помню “математику” в прошивке - этот коэффициент масштабирует уже саму “воздушную скорость”, а она нелинейно зависит от давления: github.com/iNavFlight/inav/blob/…/pitotmeter.c#L22… зато напряжение датчика линейно пропорционально разнице давлений: github.com/iNavFlight/inav/…/pitotmeter_adc.c#L39
что аналоговый Пито подключается через резисторный делитель “пополам”
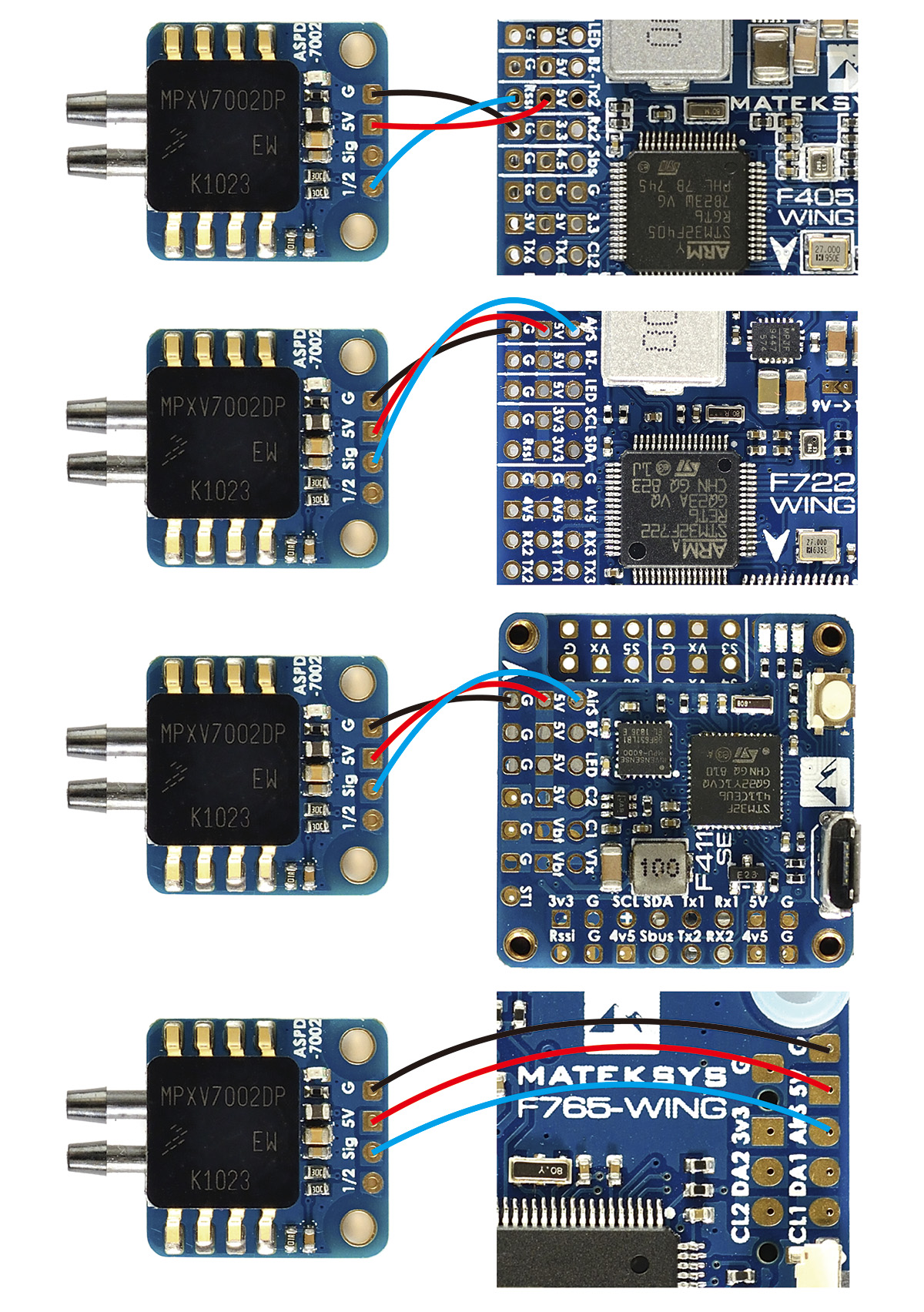
в f722 есть особые пины AirS которые подключаются согласно таблице на сайте Matek через прямую сигнальную линию без делителя. Важно это озвучить, мало ли кто-то будет также искать и будет ошибочно подключаться. Попробую еще вариант с перепрошивкой. Было еще указано где-то на английском ресурсе, что датчик плывет от влажности и температуры, однако час в холодильнике и час около кулера ноутбука (6 С и 40 С) никаких заметных изменений не дали. Трубки свободны. Где-то еще писали что калибруется Пито при включении питания, но этого я не заметил. Тесты делал и в квартире, где стоячий воздух и в поле, разницы не было
программный ребут прошивки
это типа каждый раз перед полетом прошиваться заново через dfu и закидывать diff?
в f722 есть особые пины AirS которые подключаются согласно таблице на сайте Matek через прямую сигнальную линию без делителя. Важно это озвучить, мало ли кто-то будет также искать и будет ошибочно подключаться.
Если этот “кто-то” изволит почитать инструкцию к полётнику, то увидит строчку “AirS: Analog airspeed sensor (0-6.6V) 1:1 divider resistance build-in”
И не нужно там никакого колхоза в виде подстроечника - получится лютый бред, а не показания. Почитайте даташит на датчик 7002.
это типа каждый раз перед полетом
*facepalm*
Это типа каждый раз перед полётом зайти в OSD-меню и нажать save and reboot - ну не батарею же передёргивать.
Если этот “кто-то” изволит почитать инструкцию к полётнику
Не понял что я сказал неправильно. Можно даже сам делитель на плате рассмотреть. То что в полетнике делитель встроен, не означает что подключение должно быть через два делителя.
OSD-меню и нажать save and reboot
даже через конфигуратор “Save and reboot” не меняет показаний датчика. OSD меню здесь не поможет, вызывая ту же функцию
Летаю и с аналоговым и цифровым датчиками от Matek и ничего не калибрую. Подключаю согласно схемы для конкретного полетника и ничего не калибрую- все отлично и так работает. Проверьте, может подключили не так, как надо? Например в некоторых ПК от Matek есть место (Air) для подключения аналогового датчика скорости, а для некоторых надо подключать с особенностями ( например F-405 wing)
Не понял что я сказал неправильно.
Вы попросту весьма невнятно сформулировали - о какой таблице речь (не в доках полётника, а в доках датчика). Всё примитивно как таблица умножения - собственно датчик нужно подключить к АЦП через делитель 1:2. Где будет находиться этот делитель - на плате полётника, плате датчика (на не-матековских делителя нет) или в виде отдельной пары резисторов - совершенно неважно, но он должен быть ОДИН, как вам Pilot737 и нарисовал. Про встроенный делитель в F722-wing написано в его доках, выходы матековского датчика (с делителем и без) подписаны совершенно наглядно - ХЗ что тут обсуждать пол-страницы 😁
Летаю и с аналоговым и цифровым датчиками от Matek и ничего не калибрую.
Вот и я в прошлом году отлетал замечательно, а в этом косяк случился. Нельзя исключать что не погиб датчик, либо почти погиб. С подключением все согласно таблиц и мануалу, да и за зиму вряд ли провода сами собой перепаялись.
дать для сравнения работы
Виталий, спасибо) Но боюсь времени и терпения не будет на опыты, мне даже будет проще без Пито летать, чем с такими танцами) Жду на полетах)
ХЗ что тут обсуждать пол-страницы
Вот и я думаю, развели флуд)
Добрался до полетника. Перешил на 2.4 показания на земле 0. Скачал 3.0.1 вместо 3.0 и прошился. На земле 0. С одной стороны хорошо, что 0 (в небе еще не проверял), с другой а что еще может пойти при прошивке не так, что после верификации и успешной загрузки вылезают потом какие-то жуки. Жаль нет осциля, так бы проверил что с датчика уходит, было бы ясно аппаратная беда в датчике/полетнике или все же программная. Спасибо всем за помощь, доброго неба!
Осциллограф и не нужен, достаточно тестера, если датчик аналоговый.
Жаль нет осциля, так бы проверил что с датчика уходит
Могу подогнать, только у него предел 10kHz. Школьник. (
Как жара спадет так и полетаем. Сейчас только нырять могу.
Подскажите пожалуйста почему у меня мигает высота и расстояние до дома? Знаю, что есть какие-то максимальные значения, при превышении которых начинает моргать индикатор, но название этих пределов не помню.
почему у меня мигает высота и расстояние до дома
Нужно изменить значение предупреждения дистанции и высоты. Можно внести изменение в CLI
set osd_alt_alarm = 10000
set osd_dist_alarm = 10000
Или изменить значение в настойках ОСД
Спасибо.