Автопилот iNav полёты с GPS

программный ребут прошивки
это типа каждый раз перед полетом прошиваться заново через dfu и закидывать diff?
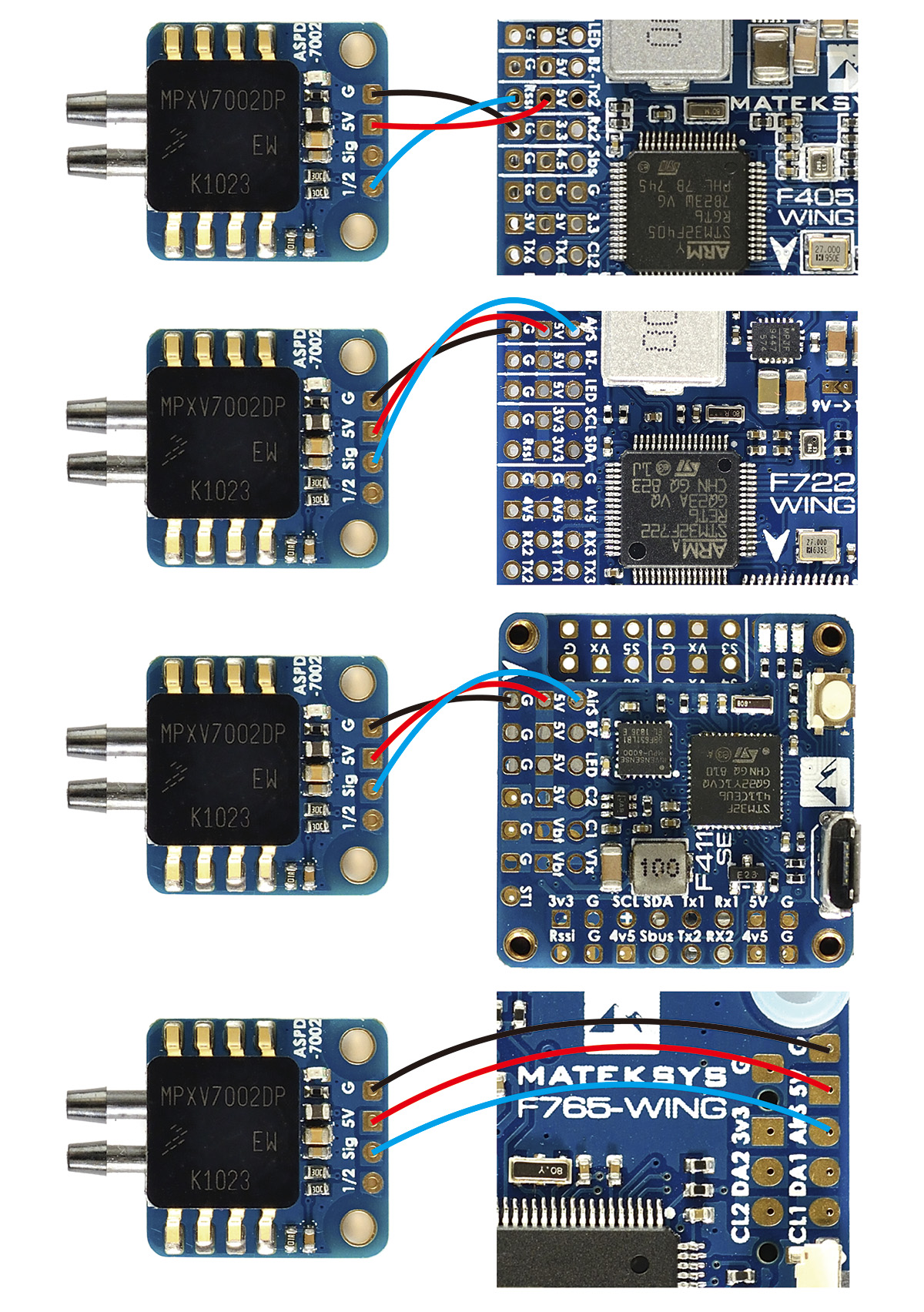
в f722 есть особые пины AirS которые подключаются согласно таблице на сайте Matek через прямую сигнальную линию без делителя. Важно это озвучить, мало ли кто-то будет также искать и будет ошибочно подключаться.
Если этот “кто-то” изволит почитать инструкцию к полётнику, то увидит строчку “AirS: Analog airspeed sensor (0-6.6V) 1:1 divider resistance build-in”
И не нужно там никакого колхоза в виде подстроечника - получится лютый бред, а не показания. Почитайте даташит на датчик 7002.
это типа каждый раз перед полетом
*facepalm*
Это типа каждый раз перед полётом зайти в OSD-меню и нажать save and reboot - ну не батарею же передёргивать.
Если этот “кто-то” изволит почитать инструкцию к полётнику
Не понял что я сказал неправильно. Можно даже сам делитель на плате рассмотреть. То что в полетнике делитель встроен, не означает что подключение должно быть через два делителя.
OSD-меню и нажать save and reboot
даже через конфигуратор “Save and reboot” не меняет показаний датчика. OSD меню здесь не поможет, вызывая ту же функцию
Летаю и с аналоговым и цифровым датчиками от Matek и ничего не калибрую. Подключаю согласно схемы для конкретного полетника и ничего не калибрую- все отлично и так работает. Проверьте, может подключили не так, как надо? Например в некоторых ПК от Matek есть место (Air) для подключения аналогового датчика скорости, а для некоторых надо подключать с особенностями ( например F-405 wing)
Не понял что я сказал неправильно.
Вы попросту весьма невнятно сформулировали - о какой таблице речь (не в доках полётника, а в доках датчика). Всё примитивно как таблица умножения - собственно датчик нужно подключить к АЦП через делитель 1:2. Где будет находиться этот делитель - на плате полётника, плате датчика (на не-матековских делителя нет) или в виде отдельной пары резисторов - совершенно неважно, но он должен быть ОДИН, как вам Pilot737 и нарисовал. Про встроенный делитель в F722-wing написано в его доках, выходы матековского датчика (с делителем и без) подписаны совершенно наглядно - ХЗ что тут обсуждать пол-страницы 😁
Летаю и с аналоговым и цифровым датчиками от Matek и ничего не калибрую.
Вот и я в прошлом году отлетал замечательно, а в этом косяк случился. Нельзя исключать что не погиб датчик, либо почти погиб. С подключением все согласно таблиц и мануалу, да и за зиму вряд ли провода сами собой перепаялись.
дать для сравнения работы
Виталий, спасибо) Но боюсь времени и терпения не будет на опыты, мне даже будет проще без Пито летать, чем с такими танцами) Жду на полетах)
ХЗ что тут обсуждать пол-страницы
Вот и я думаю, развели флуд)
Добрался до полетника. Перешил на 2.4 показания на земле 0. Скачал 3.0.1 вместо 3.0 и прошился. На земле 0. С одной стороны хорошо, что 0 (в небе еще не проверял), с другой а что еще может пойти при прошивке не так, что после верификации и успешной загрузки вылезают потом какие-то жуки. Жаль нет осциля, так бы проверил что с датчика уходит, было бы ясно аппаратная беда в датчике/полетнике или все же программная. Спасибо всем за помощь, доброго неба!
Осциллограф и не нужен, достаточно тестера, если датчик аналоговый.
Жаль нет осциля, так бы проверил что с датчика уходит
Могу подогнать, только у него предел 10kHz. Школьник. (
Как жара спадет так и полетаем. Сейчас только нырять могу.
Подскажите пожалуйста почему у меня мигает высота и расстояние до дома? Знаю, что есть какие-то максимальные значения, при превышении которых начинает моргать индикатор, но название этих пределов не помню.
почему у меня мигает высота и расстояние до дома
Нужно изменить значение предупреждения дистанции и высоты. Можно внести изменение в CLI
set osd_alt_alarm = 10000
set osd_dist_alarm = 10000
Или изменить значение в настойках ОСД
Спасибо.
Были на поле сегодня, тестили Талон с 2.6.1 . Высота возврата указана 100 метров. Всё нормально, возвращает. Это при высоте более 100 метров. Если же щёлкнуть тумблером RTH когда Талон ниже 100 метров, он резко подхватывается, довольно сильно задирает нос и старается “выгрести” во все лопатки почти “свечкой”.
Если же щёлкнуть тумблером RTH когда Талон ниже 100 метров, он резко подхватывается, довольно сильно задирает нос и старается “выгрести” во все лопатки почти “свечкой”.
set nav_rth_climb_first = off
Или настроить параметры nav_ ограничений - угол подьёма, газ и т.д.
Были на поле сегодня, тестили Талон с 2.6.1 . Высота возврата указана 100 метров. Всё нормально, возвращает. Это при высоте более 100 метров. Если же щёлкнуть тумблером RTH когда Талон ниже 100 метров, он резко подхватывается, довольно сильно задирает нос и старается “выгрести” во все лопатки почти “свечкой”.
В некоторых случаях, это же хорошо. На большом удалении, когда связь пропадает и ты ниже деревьев, то только камнем в небо спасает ситуацию. А в INAV 3.0 можно ещё и по спирали набор задать…
Талон ниже 100 метров, он резко подхватывается, довольно сильно задирает нос и старается “выгрести” во все лопатки почти “свечкой”.
Что-то не верится что там свечка. В настройках надо проверить Max pitch angle плюс поиграться с параметром Throttle to pitch ratio. Я себе ставил 20 и самолет очень полого набирает высоту. Но опять же, проверять в безопасном месте, т.к. все рейты различаются на разных самолетах.
Коллеги. Полетный контроллер - 411WSE.
У меня самолет без рудера. Выбрал нужный пресет в iNAV 2.61.
Появилось три сервомашинки. Одна на руль высоты - S5, а две - S3 и S4 на элероны.
У меня на элеронах применяется Y-кабель. Я правильно понял, что мне можно подключать этот кабель в любой разъем - или в S3 или в S4. Разница будет только в инвертировании канала?
вильно понял
Правильно
Появилось три сервомашинки
Лишнюю можно удалить и на её слот назначить РВ, в таком случае не будет лишнего канала и пустого слота
Я правильно понял, что мне можно подключать этот кабель в любой разъем - или в S3 или в S4. Разница будет только в инвертировании канала?
В любой. Если посмотрите на миксер - никакого инвертирования там нет. Если оно требуется - рекомендуют делать его не в миксере (чтобы не запутаться), а в настройках outputs
Но вообще лучше сменить Y-кабель на два “индивидуальных”:
- сможете “индивидуально” корректировать центральные положения сервомашинок;
- сможете использовать элероны как флапероны (элероны+закрылки).