qczek lrs – 433mhz 1w (30dbm) lora rc link with telemetry - новая народная?

Ну от аппаратуры/другого приемника до лоры идет же аналог?
Почему? Тот же сбас.
Почему? Тот же сбас
PPM от приемника до лоры идет по sbus?
Я использую на гоночной пятерке его без проблем, даже без включения Race_mode вполне хватает в акро летать даже на скорости 130 у земли. проблем не ощущал. Может конечно супер пупер пилоты будут недовольны)) Мне кажется среднестатистическому пилоту за глаза хватает быстродействия.
Спасибо. это отличная новость. Я так понимаю используете первые 8 каналов.
Я так понимаю используете первые 8 каналов.
Было бы странным использовать другие 8 каналов.
PPM от приемника до лоры идет по sbus?
в новых версиях софта можно вроде включить сбас.
У меня стоит PXX (XJT)
У меня стоит PXX (XJT)
и он идет по sbas? Судя по вашим заявлениям?
и он идет по sbas? Судя по вашим заявлениям?
У меня PXX.
но протокол в аппаратуре меняется - можно поставить sbus. Сам не пробовал - надо почитать доки от openTX наверняка там написано
Цифровые оба. В PPM инфа передается шириной импульса.
Это неверно. Прямо из названия следует, что модуляция осуществляется позицией импульса, а ширина импульса постоянна. Некоторые считают этот сигнал аналоговым, или гибридным, как и любой сигнал с частотной модуляцией, отсюда происходит и джиттер.
Сбас - это уарт, который передает информацию побитово. Он имеет большее разрешение и скорость, и главное проверку ошибок, чего нет в ППМ. Искажение комбинаций тут не при чем.
Беда Сбас в том, что разработчики этого протокола должны гореть в аду, за бессмысленную клоунаду с инвертированием сигнала, которая никому не нужна, но портит всем жизнь.
Беда Сбас в том, что разработчики этого протокола должны гореть в аду, за бессмысленную клоунаду с инвертированием сигнала, которая никому не нужна, но портит всем жизнь.
Вроде как кроме геморроя с лицензированием от Futaba, у решения есть техническая обоснованность, типа инвертированный сигнал меньше подвержен искажениям и более стабильно живет в условиях наводок.
Мне кажется это исключительно логическая инверсия, и на физические свойства это не может влиять. Нет желания изучать спецификации. Но факт, что для наших длин проводов это без разницы, в любом случае.
Не могу настроить телеметрию…
что есть:
ТХ—пульт JUMPER T16 с установленной yaapu, включен прием телеметрии FrSky S.Port, LRS433-1w, настроен порт на режим mavlink+sport, 57600, вход РРМ, s-port с аппы подключена М0 модуля.
RX—LRS433-100mW, порт телеметрии также мавлинк, 57600, пиксхавк-настроен порт1 57600 тип 10 (FrSky Smart Passthru).
прошил ардуинку под конвертер frsky->sport. отсюда diydrones.com/…/amp-to-frsky-x8r-sport-converter?c…
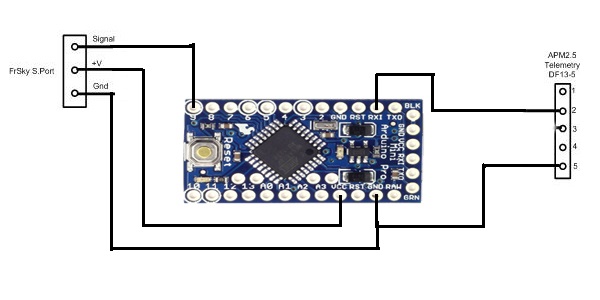
RX конвертера на ТХ пикса, выход конвертера на М0 модуля.
Но данных нет. пульт ничего не принимает
Приемника другого нет, да и задача- настроить на лоре и принять на аппу.
Вроде скорость надо ставить 9600 на всю цепочку? Или это только для варианта с блютус модулем?
Вроде скорость надо ставить 9600 на всю цепочку?
так у него ppm.
На сколько значимо влияние мотора,регуля,силовой проводки на приемные характеристики,например если почти в плотную расположить приемник и его антенну?
Спасибо. это отличная новость. Я так понимаю используете первые 8 каналов.
Конечно же все 16! каждый раз что ли передающий модуль перешивать под дальнолеты с 8 на 16? я постарался все настроить максимально универсально под все свои аппараты.
Раньше гонял на ibus 2.4ГГц от flysky (считается самый быстрый протокол 13.7 мс задержка) потом просто заменил все на эту РЛС 433. никакой разницы не заметил, ну я правда и не мега гонщик =)
На сколько значимо влияние мотора,регуля,силовой проводки на приемные характеристики,например если почти в плотную расположить приемник и его антенну?
Както при мне антенну проверяли на ксв, так даже если рядом рукой болтать было видно влияние. Так что влияние будет от электроники и проводов. А на сколько сильно и как влиять, надо с приборами проверять. Не зря приемники и передатчики ставят как можно дальше друг от друга для полетушек в даль.
считается самый быстрый протокол 13.7 мс задержка
Самый быстрый СБАС - 9мс.
Вообщем рассказываю свой опыт. Без пузыря не разберешься.
Настроил я вообщем телеметрию на последней прошивке 1.92.
Прошивка с буквой А - это 1W, с буквой B - 100 mW, T - TX (master), R - RX (slave).
T433A_P_CPPM_P_PXX_T_SPORT_V1.92.s19
R433A_T_MAVLINK_P_CPPM_P_SBUS_V1.92.s19
Прошиваем приемник и передатчик соответствующими прошами.
Дополняем наш радиомодуль, что на пульте резистором 1K от GND до M0 + кидаем провод на самый нижний контакт S.Port, если у вас Taranis X7/X8R
В конфигураторе Lora выбираем на Master PXX D16 (как то так вроде), ставим RSSI на 16 канал, перед этим включаем все 16 каналов (если у вас аппа позволяет). Далее идем в телеметрию и включаем Mavlink enc.+S.Port Master => Сохраняем.
В конфигураторе Slave: Выбираем SBAS, в телеметрии ставим Mavlink enc. Скорость 9600 везде поставил (не знаю, возможно и другую ставить).
На пульте ставим XJT D16 (как то так, по памяти). Идем в настройки дальше, добавляем телеметрию. Что я заметил еще, если у вас стоял Аналог RSSI, то пульт будет ругаться на слабый уровень сигнала в 1%, убираем аналог RSSI и у нас уже 99%
Все будет работать после перезагрузки квадрика и пульта.
Все будет работать после перезагрузки квадрика и пульта.
Телеметрия я так понял мавлинк, куда с полетника подаете телеметрию на RX или на М0?
Rssi не зависит от аппаратуры.
Телеметрия я так понял мавлинк, куда с полетника подаете телеметрию на RX или на М0?
На Rx надо.
На Rx надо.
Подтверждаю. Тыкал вчера по разному, хорошо, что ничего не согорело.
Сначала припаял резистор на приемник, написано у него на схеме SLAVE, что вводит в заблуждение.