ZOHD Dart250G 570mm FPV летающее крыло до 250 грамм

Что в миксах стоит в weight 100 или 50
И по крену и по тангажу стоит 50. Это для элевонов и логично.
Однако по крену он резвый. А вот по тангажу…
И по крену и по тангажу стоит 50. Это для элевонов и логично.
Однако по крену он резвый. А вот по тангажу…
Либо с центровкой проблемы либо с выкосом мотора. Из-за этого стабилизация сжирает бОльшую часть хода рулей.
Состряпал новый видос по дарту. Постарался включить в него все начальные приготовления для того чтобы первый взлет прошел удачно. Как глупые так и не очень. Включая наболевшую тему про выкосу мотора, а так же про то как должны быть сервы отриммированы и прочее
Подключить сервы, регулятор и приёмник.
Вы не могли бы объяснить подробнее? У меня набор включает двигатель, ESC, копилот, GPS и камеру. Т.е. всё это я покупал разом - в комплекте.
Передатчик купил отдельно : FS-i6. Он пришёл в комплекте с приёмником FS-ia6b. В том руководстве, что лежало в коробе KIT самолёта, там про схему сборки электроники практически ничего нет. Поэтому у меня вот такие вопросы:
- Гнёзда под сервоприводы есть и на приёмнике и на копилоте. Куда их нужно присоединять на самом деле? Я воткнул их в разъёмы копилота.
- После соединения ECS, копилота и GPS у меня остался один V-образный кабель. На одинарной стороне у него был “папа”, единственное куда его можно было воткнуть - “мама” PWM на копилоте. Это правильно?
- Два хвоста этого V-образного провода заканчиваются разными “мамами”. Один - на три отверстия, другой - на четыре. Я попытался гнездо с тремя отверстиями присоединить к приёмнику. Воткнул его в Ch5. Это правильно?
- Один хвост V-кабеля так и остался свободным. Это так и должно быть?
Приёмник я забиндил до того, как смонтировал его к остальному оборудованию. После этого действовал так:
- Включил передатчик (газ - на мимнимум)
- Подключил аккум на приёмнике.
Произошло следующее:
- Передатчик сразу же увидел самолёт и принял телеметрию (напряжение батареи).
- На приёмнике постоянно загорелась зелёная лампочка - всё ок.
- На копилоте загорелись две зелёные - тип аппарта “летающее крыло”
- Двигатель два раза взмемекнул.
- Правый элевон ушёл до отказа вверх.
И тишина… Никакие действия на пульте ни к чему не приводят.
Что я сделал неправильно ?
Если честно то не очень понятно из описания что куда подключено)
Вот видео где всё подробно описано, проверьте ещё раз
Вот видео где всё подробно описано,
Я очень внимательно (раза три) просмотрел это видео. Но:
- Почти весь ролик посвящён настройке, а не сборке аппаратуры.
- Он использует какой-то другой приёмник и подключает через самодельный кабель.
- На самом деле - ни хрена НЕ видно - куда он что втыкает.
Ненавижу эти видосы! Крохотная схема размером в половину тетрадного листа, за 30 секунд показала бы, что и как соединять… 😦
Я могу нарисовать, как я соединил. Это поможет?
Так там разница только в том подключать приёмник по sbus или pwm.
Очевидно у вас как то неправильно каналы подключены либо назначены в пульте (схема AETR?), как по pwm подключать нарисовано ниже
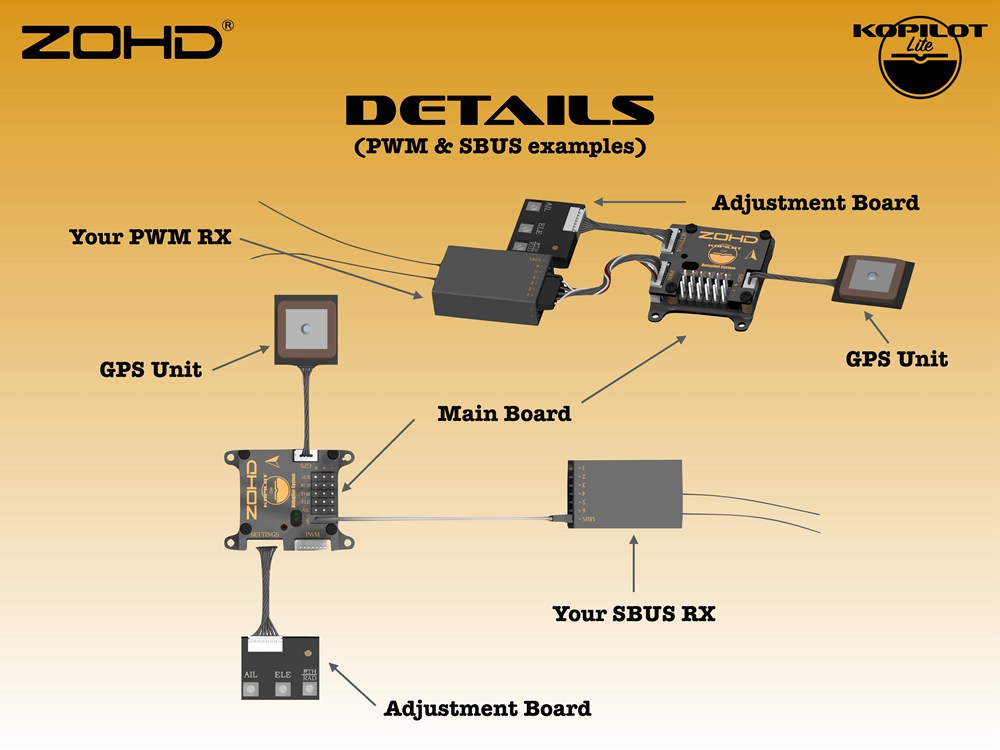
как по pwm подключать нарисовано ниже
Спасибо за картинку! Где такие лежат, если не секрет ?
Я свою проблему обвёл красным овалом:
И проблема состоит из двух пунктов:
- Приёмник у меня не такой, как на этой картинке, а вот такой:
rcsearch.ru/wiki/FlySky_iA6B И разъёмы у него другие.
- У меня нет кабеля, похожего на тот, что на рисунке. Кабель с разъёмом для гнезда PWM имеет V-образный
вид:
Белая мама втыкается в разъём PWM. Остаются два хвоста - один на 3 дырки,
другой - на 4. Маму с 4 дырками одевать некуда. С тремя дырками одел на
разъём BNCC приёмника. Ничего другого не придумал.
Ну и самый первый вопрос остался - разъёмы от ESC и серв куда втыкать - в копилот, или в приёмник
Белая мама втыкается в разъём PWM. Остаются два хвоста - один на 3 дырки,
другой - на 4. Маму с 4 дырками одевать некуда. С тремя дырками одел на
разъём BNCC приёмника. Ничего другого не придумал
как это некуда…
Тот который на 4 пина надо вставить в приемник вдоль а не поперёк в те пины ГДЕ ИДЁТ СИГНАЛ. Белый там где первый канал.
А тот что с тремя пинами следом но перпендикулярно. Так же белый к 5-му сигнальному пину, черный и красный - минус и плюс соответственно
Картинка с бангуда 😃 кабель на рисунке тот, просто в один сплетён
И схему каналов в пульте обязательно проверьте, должна быть AETR т.е.:
1 - элероны
2 - руль высоты
3 - мотор
4 - руль направления (если есть)
Тот который на 4 пина надо вставить в приемник вдоль а не поперёк в те пины ГДЕ ИДЁТ СИГНАЛ.
Кричали женщины “Ура!”
И в воздух чепчики бросали.
😃
Соединился и криво-косо, но - работает! Вот какие проблемы остались:
- Элевоны управляются. И даже более того - управляются правильно! А вот ручка газа не оказывает никакого эффекта. Хотя во время включения двигун пару раз крутанулся.
- Через минуту - другую самолёт начинает попискивать где-то раз в 3-5 секунд. Что это значит - не понимаю.
Ну и по поводу
И схему каналов в пульте обязательно проверьте
Это в каком меню? Что-то искал - не нашёл…
Это в каком меню? Что-то искал - не нашёл…
честно - не подскажу. Флайскай был очень давно
По газу - посмотрите видео которое я скидывал с 14:40, там про калибровку рассказывают
По газу - посмотрите видео которое я скидывал
Похоже, что у меня ошибка где-то раньше… Предполагаю, что это из-за того, что у меня проблемы с GPS. Красный LED нп копилоте, который должен гореть постоянно, моргает. В инструкции написано, что это означает, что GPS модуль не найден.
Я его выдернул, воткнул снова, ситуация изменилась - LED моргает по прежнему, но двигатель вдруг заработал! Праздник души 😃
Далее (по доке) надо настроить режим стабилизации. Но он не может быть настроен без GPS. Ещё раз передёрнул - двигатель опять отключился 😦
Попытался разобраться с передатчиком. Насколько я понял, на канал 5 должен быть настроен 3-позиционный переключатель. Сейчас у меня настройки такие:
Левый джойстик вверх/вниз - 3 канал
Левый джойстик вправо/влево - 4 канал
Правый джойстик вверх/вниз - 2 канал
Правый джойстик вправо/влево - 1 канал
Переключатель Swc (три положения) - 5 канал
Во всяком случае, так видно в меню “Disolay”. Думал такая настройка поможет менять режимы полёта. Однако это дало очень мало эффекта. Двигатель по прежнему не работает, а изменение состояния переключателя приводи к тому, что элевоны как-то станно трепещут, но никакой стабилизации нет. Ну да, как она может быть без GPS?!
Короче - ума не приложу, что ещё можно сделать…
Ну да, как она может быть без GPS?!
Стабилизация к GPS не имеет никакого отношения, он нужен только для возврата домой.
Либо с центровкой проблемы либо с выкосом мотора.
Так, как я понял, центровка 3-4мм за штатными пипками, выкос 1-5 градуса вверх. Правильно?
Стабилизация к GPS не имеет никакого отношения
Когда я читал все эти доки, то там было написано, что режим “стабилизация” - это удержание от рысканья, сваливания на крыло и по высоте.
Вопрос - как копилот может удержать самолёт на курсе, если он ничего не знает о курсе? Как он может удержать его на высоте, если у него нет высотомера?
Но для меня это - уже второе по значимости. Первое - почему копилот не видит GPS ?!
Вопрос - как копилот может удержать самолёт на курсе, если он ничего не знает о курсе? Как он может удержать его на высоте, если у него нет высотомера?
А у копилота разве есть круиз?) Вот это новость…
Куча коптеров летает со стабилизацией без всяких ГПСов и нормально
Так, как я понял, центровка 3-4мм за штатными пипками, выкос 1-5 градуса вверх. Правильно?
Да, только не ЗА а ПЕРЕД (ближе к носу).
Если ЗА то будет задняя центровка, он тогда вообще как утюг летает. У меня примерно на 3мм перед пипками, летит отлично и почти не клюёт носом на добавлении\сбросе газа.
К сожалению не будет… в 95гр их не вписать ну никак
Как-то так

А на что еще тип аккума влияет?
Отвечаю сам себе. При выборе NiCd:
- Перестают считаться банки
- Отсечка устанавливается на 50% / 65% / 75% напряжения, обнаруженного при подключении аккумулятора
Соответственно отсечка получается 2.1В / 2.73В / 3.15В на банку или чуть меньше. Остальное все то же самое.
Как-то так
хм… а что за акум? Отдельно сколько весит?
Samsung 30Q, сборка шоколадок на 1г тяжелее. Весят 95-96 грамм соответственно.
Как-то так
Пропеллер случайно не от квадрика типа ЗМР250?