Бесколекторный команч 2.4 ГГц!

Т.е. совмещено PWM2PPM с алгоритмом первоначального миксера, так?
PWM-to-PPM обычный 6-ти баксовый чтоли?
А что это за “обычный 6-ти баксовый” конвертер? Ссылочку можно?
Нет. микшер один. С модуля 4в1 напрямую подключаются выходы моторов, а на выходе имеем сигналы управления ESC.
А в чём тогда разниться алгоритм конвертирования сигнала от обычного конвертера? Ведь если я правильно понял, то в последней версии этого эксклюзивного конвертера на входы приходят ШИМ-сигналы, а с выхода снимаются РРМ-сигналы для ESC. Вся обработка канальных импульсов с приёмника, в том числе и модифицирование длительности импульсов РРМ для моторов, происходит в родном блоке 4-в-1. Или в конвертере выходные шим-сигналы каким-то образом дополнительно обрабатываються? Интересно каким?
ну из выше сказанного предложу, запасайтесь рамами и экспериментируйте
а от себя если кто сделает чертеж или наброски переходника в виде шайбы с отверстиями и с резьбой готов сие чудо воплотить в жизнь на спец оборудование
Информация для размышлений.
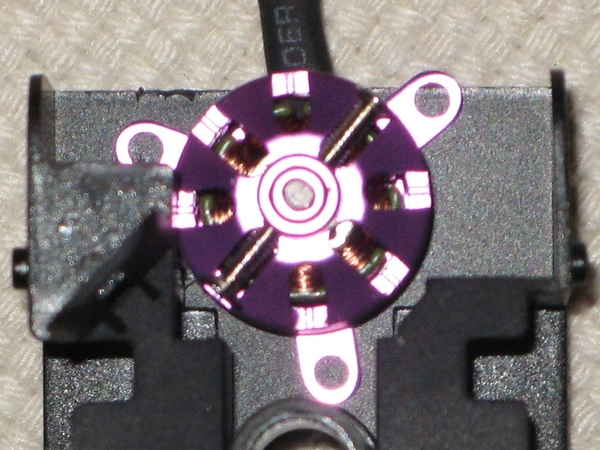
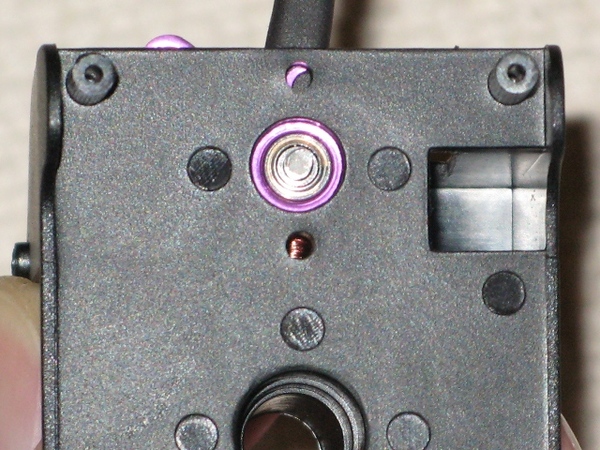
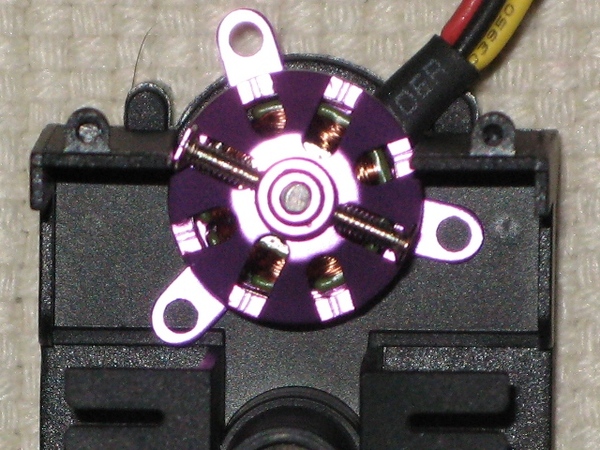
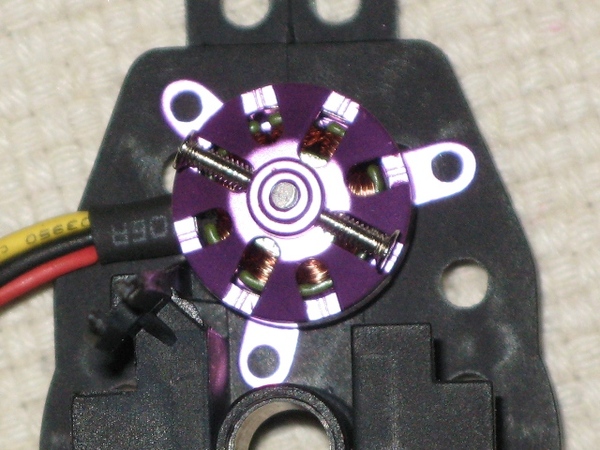
Моторы в первоначальном виде, без каких-либо доработок просто приложены к раме. Подругому моторы расположить невозможно, расположение выхода проводов- не в счет.
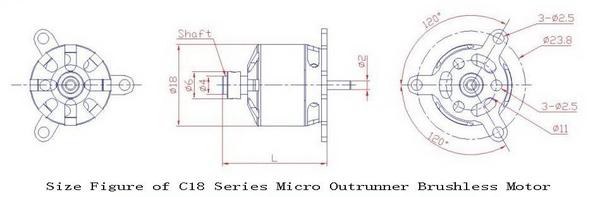
чертеж моторов
З-я лама
передний мотор
задний мотор
4-я лама

передний мотор


задний мотор
У кого какие мысли о переходнике? Набросайте кто-нибудь.
На мой взгляд, стоит задуматься, а нужен ли он? Оправдает ли он затраты на изготовление?
Теперь о креплении.
Если крепить мотор не обрезая ушек, то точек крепления будет только две, впринципе под третью точку можно попробовать использовать отверстия на корпусе мотора (см. чертеж) обмотки винт не повредит. но вот только отверстия там под винты 3мм. шляпка у них толстовата- шестерню может задевать, а если “в потай” использовать то конус шляпки аккурат до корпуса мотора через раму должен дойти.
я работаю а автокаде но как перенести ресунок сюда на форум .dwg фаил нечем открыть,
короче выйду на работу (после отпуска) сделаю переходники,крепится будут к раме через родные отверстия а мотор к переходнику,может и моторы к тому времени привезут
для таких случаев есть кнопочка принт скрин.
а дальше ? куда сохраняет?
а дальше ? куда сохраняет?
Дальше открывешь: ПУСК=>ВСЕ программы=>Стандартные=>Paint и делаешь правой кнопкой мыши “вставить”.
Картинку сохраняешь, вывешиваешь на сайт типа “фото майл ру” и вставляешь на форум кнопкой “вставить картинку” ссылку даешь с сайта где вистит фото.
в отверстия для крепления бк будут вварины контактной сваркой шпильки с резьбой
отверстия для крепления мотора (переходника) к раме я бы делал после того как мотор будет заклеплен на переходнике и расположен (спозиционирован) на раме. Важна точность иначе уплывет зазор в шестерне. И еще, надо будет проверить будут ли идентичны переходники переднего и заднего моторов. А так, идея хорошая 😃 , но выпиливать в ручную- замучаешься 😦 . Похоже проще чем делал Андрей (две точки крепления) или я (три точки, но надо обрезать ушки моторов) неполучится… 😢
Народ! Неужели толко я и Андрей ставили такие моторчики не держите в себе- поделитесь опытом! 😒
сделаю тютелька в тютельку,станок та немецкий,еще все захотят такие
Что-то никто не удосужился ответить на мои вопросы. Повторю, может кто снизойдёт.
-
Что это за “обычный 6-ти баксовый” конвертер? Ссылочку можно?
-
В чём отличается алгоритм конвертирования сигнала в новом конвертере Andrey73 от обычного конвертера? Ведь если я правильно понял, то в последней версии этого эксклюзивного конвертера на входы приходят ШИМ-сигналы, а с выхода снимаются РРМ-сигналы для ESC. Вся обработка канальных импульсов с приёмника, в том числе и модифицирование длительности импульсов РРМ для моторов, происходит в родном блоке 4-в-1. Или в конвертере выходные шим-сигналы каким-то образом дополнительно обрабатываються? Интересно каким?
Второй вопрос больше к разработчику. Andrey73, откликнись!
Сейчас модуль проходит тестирование, но пока могу сказать что он выдаёт сигналы которые отличаются от тех, которые выдавали бы два “6-ти баксовых PWM2PPM конвертора”. Так как сигнал на каждый мотор не просто конвертируется, но и учитывается сигнал с другого мотора. Так как это будет бюджетная версия brushless апгрэйда с использованием родного пульта и модуля 4в1, то на практике это даст увеличение скорости пируэтов + экспоненту на руддер для комфортности управления.
а я… а на меня кто-то обратит внимание? хотябы ветку гляньте rcopen.com/forum/f65/topic111935
и я готов уверять со 100% вероятностью что не пашет именно из-за гиры ибо:
- приемник сменил штатный на Futaba R607FS (с пультом естессно)
- поменял 2 микшера (ща еще возьму V-tail если с ним заработает то это будет первая ложка дегтя в бочку меда)
- сменил 3 гиры (заработал только с одной, я указал с какой)
- регуляторы хода с E-sky сменил на Jeti model
в общем все поменял и только когда меняешь гиру лама оживает… при этом в работоспособности гироскопов уверен на 1000%
с этим будем бороться или “а ну его”?
Сейчас модуль проходит тестирование, но пока могу сказать что он выдаёт сигналы которые отличаются от тех, которые выдавали бы два “6-ти баксовых PWM2PPM конвертора”. Так как сигнал на каждый мотор не просто конвертируется, но и учитывается сигнал с другого мотора. Так как это будет бюджетная версия brushless апгрэйда с использованием родного пульта и модуля 4в1, то на практике это даст увеличение скорости пируэтов + экспоненту на руддер для комфортности управления.
Я собирал вариант бесколлекторной Ламы с самодельным конвертором на два канала на одной АТини13. “Скорость пируэтов” получалась с родного ламовского пульта запредельная, причём в любую сторону. Раддером приходилось работать очень аккуратно. Считаю, что увеличивать этот параметр совершенно лишнее, скорее уж нужно подпаивать доп. резисторы на переменник раддера в пульте, загрубляя его чувствательность.
Что означает: “…сигнал на каждый мотор не просто конвертируется, но и учитывается сигнал с другого мотора”? Как учитывается, какова зависимость сигналов друг от друга? Хотелось бы всё таки услышать нечто конкретное.
А что, таки, за “6-ти баксовый PWM2PPM конвертор”, который уже не первый раз упоминается? Даст кто-нибудь ссылку то?
Я собирал вариант бесколлекторной Ламы с самодельным конвертором на два канала на одной АТини13. “Скорость пируэтов” получалась с родного ламовского пульта запредельная, причём в любую сторону.
Я имел ввиду скорость пируэтов с родными коллекторными моторами. Сейчас подбираю коэффициенты, чтобы и скорость была больше и комфортность управления улучшилась.
в общем все поменял и только когда меняешь гиру лама оживает… при этом в работоспособности гироскопов уверен на 1000%
с этим будем бороться или “а ну его”?
Отписал в личку.
Я имел ввиду скорость пируэтов с родными коллекторными моторами. Сейчас подбираю коэффициенты, чтобы и скорость была больше и комфортность управления улучшилась.
Какой смысл в конвертере для коллекторных моторов?
Андрей, Вы опять не ответили ничего по принципу работы Вашего конвертера-миксера. Или разницы между ним и обычным конвертером нет и Вам просто нечего сказать?
Дождёмся финального релиза и посмотрим что скажут пользователи.
Дождёмся финального релиза и посмотрим что скажут пользователи.
Опять туман… Ведь и по предыдущему варианту миксера так ничего конкретного не было сказано. Какие сигналы влияют друг на друга, какая зависимость этого влияния и т.п.?
По-моему всё таки Вам просто нечего сказать. По другому я не могу расценить Ваше упорное замалчивание вышезаданных вопросов. В конце концов никто не просит выкладывать исходник программы.
Да почему, молчание как раз понятно, начнет рассказывать про принцип работы, так сразу задолбают советами и т.п., а так только отзывы что супер-пупер, потому как других вариантов практически нет 😉 Сделал человек доступным для всех и то славненько 😃
Да почему, молчание как раз понятно, начнет рассказывать про принцип работы, так сразу задолбают советами и т.п., а так только отзывы что супер-пупер, потому как других вариантов практически нет 😉 Сделал человек доступным для всех и то славненько 😃
Так интересно же, ё-моё! Что мы тут одни “покупатели” что ли собрались? Ведь понимание КАК РАБОТАЕТ не повредит пользователю, а наоборот будет на пользу!
Ну не прошу же рассказывать блок-схему программы конторллера, хотя бы пояснить КАКОЕ влияние сигналы моторов оказывают друг на друга.
Ну не прошу же рассказывать блок-схему программы конторллера, хотя бы пояснить КАКОЕ влияние сигналы моторов оказывают друг на друга.
В замечательном голливудском мультике “Кунфуйская панда” главной идеей была глубокая китайская мудрость, что никакого секретного ингридиента нет, хотя все в него верят. Так и в моих конверторах-микшерах АБСОЛЮТНО нет никакого секретного алгоритма. Просто всё сделано аккуратно и ПРАВИЛЬНО. Что это означает? Всё очень ПРОСТО. Сигналы на регуляторы строго соответствуют стандартам и ни при каких условиях не могут выйти за их пределы, разница между скоростью вращения двигателей (т.е. скорость пируэтов) тоже не может превысить заданных значений. И изначально разрабатывался не как универсальный абстрактный микшер-конвертор, а для использования именно на соосном вертолёте, и все коэффициенты подбирались исходя из этой задачи. Учитывается, что управление идёт не на сервы, а на моторы.