Activity
Это при 3,6 или 4,98?
При 3,6 В. Когда убрал все ранее напаянные сопротивления.
Размышляя над другими непонятными мне моментами (например: бетафлай показывает напряжение 1.4 В от батареи, которая, вообще-то, совсем не подключена. Только USB ) я думаю, что так и есть.
…померил 3.3 линию - 3.25 В. Видимо дело не в этом.
При замене вот этого резистора (обведено кружочком) напряжение 5В линии поднялось с 3.6 В до 4.98 В (на конденсаторах до 5.7В). Казалось бы как здорово, но контроллер стал виснуть в бетафлае, когда через 5 секунд, когда через 15… (хоть с питанием только от USB, хоть вместе с батареей). Перепаял сопротивление на побольше. Напряжение на выходе стало 4.6В, виснет всеравно, но, вроде бы, чуть дольше работает до этого момента. Убрал все сопротивления, оставил только родное: на шине 5В - 3.98В, но все работает, летает и при настройке не виснет. Вот так.
Как вы думаете, есть ли смысл в двух нижних пластинах рамы типа QAV250? Может убрать одну и крепить лучи напрямую к одной пластине болтами?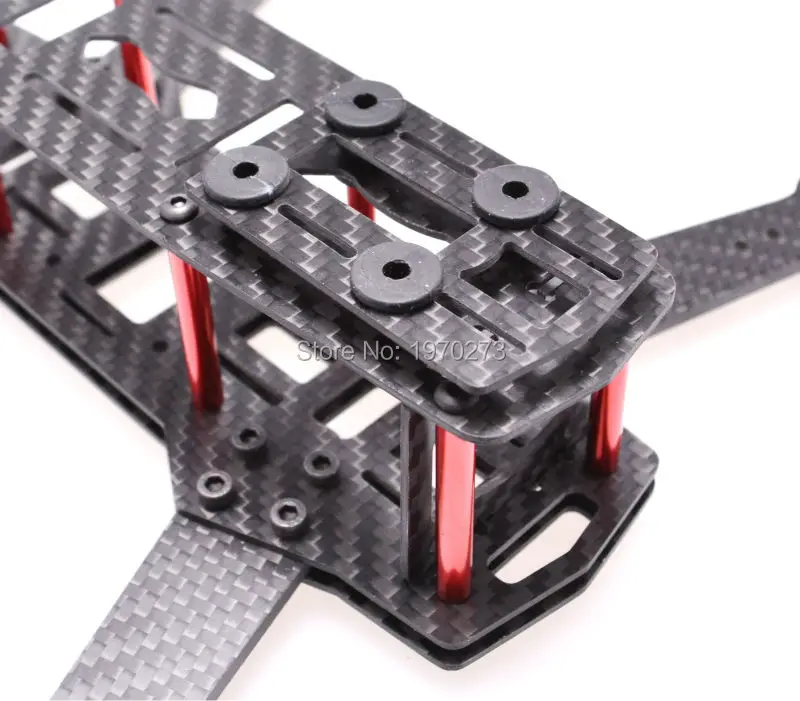
Регулятор и пропеллеры это и есть комплектующие. Мелкая рама тут не причем.
Cобрал небольшой коптер, но, как всегда, возникла проблема.
Вот такие двигатели и регули


На 6030 и 5030 пропеллерах наблюдается явный переизбыток мощности. Решил попробовать 4045 пропеллеры. Вот тут то все и началось:
www.youtube.com/watch?v=AERXZDCqQlQ&feature=youtu.…
и это явно не ПИДы!
С таким я раньше не сталкивался. Это что, срыв синхронизации? А почему он происходит? Кстати, такой же эффект наблюдается при снятых пропеллерах. Это регули виноваты? Что делать?
Помогут ли мне регуляторы от А. Козина?
Подскажите, летает ли кто-нибудь в такой конфигурации:
Mode2: слева газ+roll справа pitch+yaw ?
или все таки у всех roll и pitch вместе?
Да, подтверждаю ПИДы рабочие! 5 минут полет нормальный! Впереди ещё много тестов и настроек, но то, что эти ПИДы стали отправной точкой - никаких сомнений!
Вопрос к Serjio_S: Почему все-таки 6030, а не 5030? Сегодня я, кстати, летал на 5030
Ситуация один-в-один как у Serjio_S.
Построил коптер…
Сетап:
- Рама самопил 300мм.
- Мозг APM 2.6,
- Моторы BE1806 2700.
- Винты 6030.
Вес 800гр.
Видео, к сожалению, только такое. Развитие осцилляций не видно, но слышно
Взлет, через мгновение лавинообразное нарастание амплитуды осцилляций, переворот, падение.
PID`ы дефолтные. Хотел спросить куда крутить, пойду смотреть ссылку Алексея Козина.
Хорошо, что мои проблемы не являются уникальными!
Поискал по ветке, такой проблемы не нашел.
Обновился Mission Planer до 1.3.31 build 1.1.5696.33420.
Теперь в разделе Flight Modes (Initial Setup -> Mandatory Hardware -> Flight Modes) в выпадающих списках нет ничего
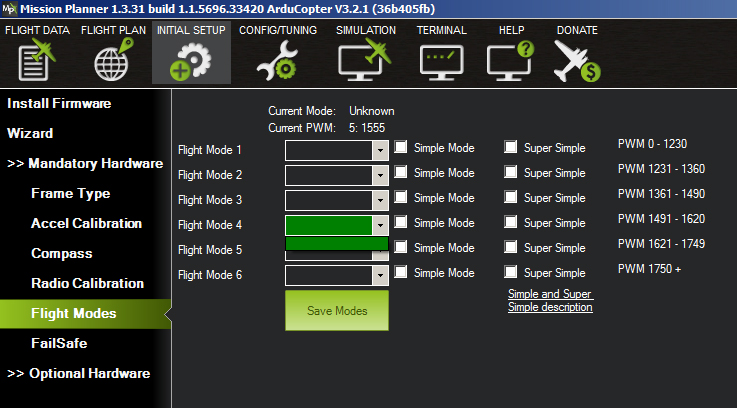
Что то сломалось? Как мне быть?! Помогите!
Возьмите линейку и поверните за секунду на 90 градусов…
Хоть в центре, хоть в 30 см от центра (хоть в метре) угловое ускорение по вертикальной оси будет одинаковое. Ведь и центр и точка в 30см от центра за одинаковое время повернулась на одинаковый угол.
С фоторезистором я собираю отдельный стенд. Т.е. планируется не датчик вешать на луч, а двиг+пропеллер устанавливать на стенд и все настраивать. На черных двигателях рисовать белым маркером. Три измерения может быть и быстрее, но на нормальном стенда качество балансировки выше! Все зависит от поставленной задачи.
Кстати! А пусть нам ответят специалисты: можно ли как нибудь привязаться к угловому положению двигателя, без всяких датчиков? Ведь регулятор знает на какую обмотку надо подать напряжение. И вообще, существует понятие синхронизации.
слишком накладно такое
Чего тут накладного?
Берешь вот такой фото резистор, подключаешь его к атмеге. Маркером на двигателе рисуешь риску. Размещаешь резистор перед риской. PROFIT! Путем несложного программирования вычисляешь место, относительно риски, куда требуется повесить грузик.
раз пропало управление скорее всего завис контроллер
а по логам это можно как-нибудь определить?
В каком режиме был АПМ когда перестал слушаться?
Loiter
По файлсейву, если настроен, RTL должен включится был, или не настроено??
RTL настроен по файлсейву радио, но как то мне кажется RTL включился на мгновение раньше, чем сработал файлсейф, почему так, не пойму. Вот, кстати, лог:
До этого днем летал - все было отлично. Решил полетать вечером, 5 минут полет нормальный и вдруг не слушается управления, полетел в Китай, но не долетел, метрах в ста ему на пути встретилась Земля.
В конце логов, перед крашем пишет: Err: FAILSAFE_RADIO-1 и Err: FAILSAFE_RADIO-0. Кстати, FAILSAFE_RADIO-1 совпало с включением RTL
Я тихонько радуюсь, что у меня все стабильно и идеально
Я не верю в суеверия!!!
Кстати: ArduCopter V3.1.2
У всех столько проблем, то высоту не держит, то GPS не работает, то вообще упадет. Я тихонько радуюсь, что у меня все стабильно и идеально работает! Долго летал со стоковыми PIDами (и было все классно), недавно сделал АвтоТюн, ну наверное стало лучше, но точно не хуже.
А вопрос у меня такой: как узнать версию прошивки на которой летает коптер?
А у вас принципе с приемника выходит сигнал RSSI?
Все понял. На приемнике нет такого выхода.
Подскажите, не знаю как быть.
Вот эта RCTimer MAVLink-OSD V1.0 должна показывать мощность сигнала от пульта, т.е. RSSI. У меня всегда RSSI=0%. Может где в настройках APM включается/выключается это значение или моя аппаратура (Hobby King 2.4Ghz 6Ch Tx & Rx V2) не подходит?
А вы, у продавца помощи попросите.
А как мне поможет продавец?
Надеюсь на вашу помощь!
вот такая плата
Версия 2.2b2 с сайта www.simplebgc.com/files/ вообще не прошивается. Версия 2.1 прошивается, но через GUI не подключается. Нажимаю кнопку “подключить”, а она пишет “подключение к COM8” и все… ничего не происходит.
Помогите!
А где платку такую заказывали ?
вот здесь:
goodluckbuy.com/gy-273-hmc5883l-electronic-compass…
отрезать линию SCL. Это первая ножка компаса.
Большое спасибо, все отлично заработало!
Так что на платку можно и нужно подавать 5В.
Совершенно верно! Подаем 5в, на выходе черной штучки стабильные 3.3в!
Осталось разобраться как отключить распаянный на плате компас. Програмно, как я понял, это не делается. Надо что-то резать.
Ясно, спасибо!
Но конвертер нужен с 5 на 3.3 вольта, правильно? Выносной компас то работает от 3.3, а на борту Crius`a 5в.
Да! Напряжение шины I2C - 5 вольт. Но есть же 3.3 вольта на контактах для FTDI !
Мне пришел выносной модуль компаса.
Оказалось, что его рабочее напряжение - 3.3v
Потыкав во все места платы вольтметром обнаружил требуемое напряжение на контактах от FTDI
Можно ли использовать это напряжение для питания внешнего компаса или все это слишком просто, что бы быть правдой?
Добавлено позже:
Ой-ёй-ёй, почитал несколько страниц назад, так оказывается, чтоб мой выносной компас заработал нужно перерезать какие-то перемычки. Про AIO указано что резать, а про мою нет. Подскажите, кто знает. Очень не хочется перерезать что-то не то…
да это они сиги стреляли в своем раЁне, обычное дело)
К сожалению это оказалось очень не смешно. Сегодня на модельном авиашоу, орел встретился с самолетом. Орла порубило на куски, но к сожалению он умер не сразу, лежал умирал. Жутко. Весь вечер сижу переживаю, думаю пилот тоже не в восторге…
Этот орел всегда с нами летал в том месте… 😌
Уж лучше пусть техника пострадает, не колечьте, пожалуйста, птичек.
нет, не понимаю его.
У меня гекса, 9 дюймовые винты и оси двиг-ей от центра - 26 см.
Есть большое желание сделать гексу покомпактней. А именно приблизить моторы к центру. Ессно начинают мешать друг-другу пропы. Как мне лучше поступить:
Приподнять немного двиг-ли и пропы один над другим (соседние), так что бы они были внахлест, только на разной высоте или
Опустить двигатели (через один) ниже уровня луча, сделав из него не тянущий, а толкающий (опорный) винт?
Спрашиваю в разрезе того, не будут ли воздушные потоки, создаваемые пропами мешать работе этих самых пропов.
У меня этот шанс стремится к 0.
Когда на моей гексе с MultiWii выключился один двигатель, она просто упала (с высоты около 4 метров). Может быть при падении с 40 метров она бы успела стабилизироваться и мягко сесть, но 4 метров для этого не хватило.
Кто-нибудь садил гексу с одним выключенным двигателем?
Кстати! Если в полете разваливается один из пропов, то ессно гекса начинает валится в сторону этого отвалившегося винта. Но мозги то не знают, что проп может развалится и начинают до максимума увеличивать скорость вращения этого двигателя. Так и падает вся гекса на землю с бешено крутящимся двигателем без пропеллера. Более того, противоположный винт, которому бы остановится по хорошему, полностью все равно не остановится. Таким образом он будет создавать какую-никакую, но тягу, тем самым переворачивая гексу во время приземления падения.
Вот как то так.
Прочитал всю тему, но так и не нашел ответа на вопрос:
Какие плюсы и какие минусы имеет квадрокоптер перед гексой?!
…в разрезе использования коптера для видеосъемки.
Я заранее извиняюсь, объясните почему на более дешевую плату Crius AIO (или её клона с ХК)

нельзя залить прошивку от ArduCopter`а,

если все железо на них одинаковое?
Как есть? А можно поподробней? Нигде в описании не встречал этой функции…
А для тех, кто в танке
PORTB4
это конкретно где?
Ура! Заработало!
Т.к. у меня не только гекса но и самолет, мне требовалось реверсировать направления Roll и Pitch, потому что для самолета и гексы они различались. Меня уже заколебало каждый раз, если я хочу полетать на гексе после самолета, включать комп и там переназначать направления Roll и Pitch.
Ну так вот! Вот здесь, mataor подсказал мне как это сделать, я сделал и все получилось, за что ему и другим, кто мне помогал большое спасибо!
Итак! Чтобы реверсировать направление, например, Roll и Pitch необходимо в Rx.ino найти строки:
#define RX_PIN_CHECK(pin_pos, rc_value_pos) \
if (mask & PCInt_RX_Pins[pin_pos]) { \
if (!(pin & PCInt_RX_Pins[pin_pos])) { \
dTime = cTime-edgeTime[pin_pos]; \
if (900<dTime && dTime<2200) { \
rcValue[rc_value_pos] = dTime;
и после строки
rcValue[rc_value_pos] = dTime;
вставить следующие строки:
if (rc_value_pos==ROLLPIN) rcValue[rc_value_pos]=3000-rcValue[rc_value_pos]; \
if (rc_value_pos==PITCHPIN) rcValue[rc_value_pos]=3000-rcValue[rc_value_pos]; \
и все получится!
заходим в RX.ino, в процедуре измерения длительности сигнала добавляем код
IN=3000-IN
получается при IN=1200 на выходе будет 1800, при IN=1600 на выходе будет 1400
Так и не смог разобраться где конкретно в RX.ino находится эта процедуа измерения длительности. Может кто-то сможет указать точнее?!
Добрый день. Требуется подсказка, так как сам разобраться не смог.
У меня кроме гексы ещё и самолет, так вот на этих аппаратах реверсированны направления picth. Для того чтобы полетать на одном, а потом на другом приходится каждый раз перепрограммировать с компьютера пульт, т.к. пульт настройки для разных аппаратов не запоминает.
Вопрос: как в ПО на гексу реверсировать pitch?!
Сорри конечно, пульт то какой? Этот?
Естественно! 😃
Добрый день. Требуется подсказка, так как сам разобраться не смог.
У меня кроме гексы ещё и самолет, так вот на этих аппаратах реверсированны направления picth. Для того чтобы полетать на одном, а потом на другом приходится каждый раз перепрограммировать с компьютера пульт, т.к. пульт настройки для разных аппаратов не запоминает.
Вопрос: как в ПО на гексу реверсировать pitch?!
Неужели схлопнулся??? Может у него есть ещё какой адрес?
P.S.: Это ХоббиКинг нажаловался в кремль, что на Таймере выложен запрещённый контент и его прикрыли как Лурк. 😃