Activity
Так и не дождавшись однозначных ответов - собрал как есть.
Предлагаю потестить и прокаментить, поправить мои ошибки в русской тулзе настройки полетного контроллера LoveFlight Rabbit с 23й прошивкой.
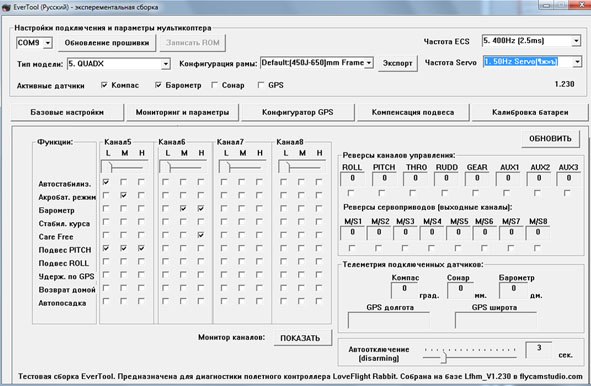
Программа Everfly_Tool_RU230b является экспериментальным ПО, однако с полнофункциональным интерфейсом, собранным и модернизированным на базе Lfhm_FW_V1.23 с адаптацией для русскоязычных пользователей.
Основные изменения по сравнению с оригинальной Lfhm_FW_V1.23:
• Интерфейс программы подвергся незначительной переработке с целью более удобного выполнения рутинных процедур конфигурирования мультикоптера.
• Адаптация программы на русский язык.
• Пункты меню настройки стабилизации полетного контроллера изменено согласно логике аналогичных полетных контроллеров.
• Убраны не нужные на мой взгляд ползунки и пункты в настоечном интерфейсе, они только сбивают с толку.
В целом логика интерфейса осталась прежней и привычной, поэтому переход на русскую сборку не будет дискомфортным для пользователей полетного контроллера LoveFlight, наоборот надеюсь сделает работу с GUI еще удобнее.
Софт для Windows, тестовая сборка от 25 января 2013 г.
Cкачать русский архив сборки, включая драйвера для платы и инструкцию на русском: EverTool_V23b.rar
Скачать программу настройки отдельно: Everfly_Tool_RU230b.rar (архив с исполняемым файлом, просто скачайте его в корень 23й прошивки, распакуйте и запускайте настройку с него)
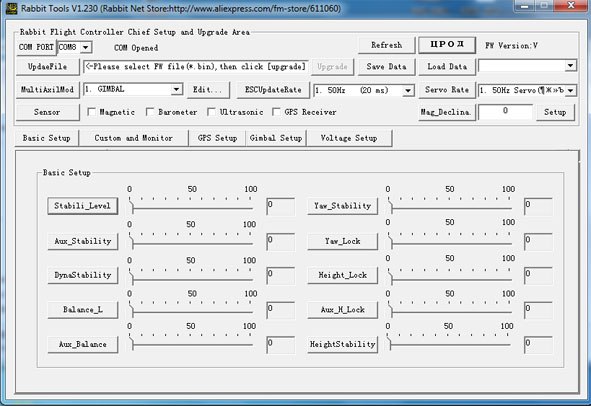
Cкачать оригинальный архив сборки, включая драйвера для платы: Lfhm_FW_V1.230_20121209.rar (китайский и английский язык)
Инструкция по настройке коптера в программы Everfly_Tool_RU230b (в процессе наполнения)
ЗЫ Это тестовая версия, как бы бета. Я оттестировал софт на наших платах, но все же должен довести до Вашего сведения что ПО экспериментальное, при неверной настройке коптера возможно что угодно - то есть вы пробуете ее на свой страх и риск.
Так же как и некоторые параметры могут быть истолкованы мной неверно, поправляйте - буду вносить поправки.
Буду благодарен за Ваши отзывы о работе программы на форуме.
С уважением, Андрей Палеха
Согласен с Вами, будем исправлятся
Поэтому и поставил вопрос.
Мое видение:
Чуствительность баро\сонар (Height Lock)
Общая чувствительность удержания. Смягчает амплитуду ручки газа в активированном режиме удержания, регулятор высоты до уровня парения.
Зависимость баро\сонар (Aux Height Lock)
Зависимость газа при превышении нужной высоты, чем выше значение - тем меньше область “перепрыгивания” нужной высоты.
Амплитуда баро\сонар (Height Stability)
Малейшие изменения давления имеют больше влияния на газ. Больше значение – большая чувствительность к небольшим изменениям давления, меньше значение – уменьшенная чувствительность к небольшим изменениям давления.
Предложения для понятности обозначить эти пункты в GUI как
Main Altitude
Altitude P
Altitude D
Однако нужно подтверждение общественности.
Всем привет)
Давайте поговорим за настройки высоты, за что отвечают три последних ползунка в настроечном окне 230й прошивки.
Дело в том что в 12й все было по другому

В 21й я их попросту убрал что бы уменьшить экан.

А вот теперь в 23й хочу вернуться и разобраться – что да как, мне показалось или эта теме в ветке не раскрыта? Пересматривая этот вопрос захожу в тупик.
Вопрос по поводу:
- Height Lock
- Aux Height Lock
- Height Stability
Можно растолковать как:
- Чуствительность баро\сонар
- Зависимость баро\сонар
- Амплитуда баро\сонар

Ваши мысли, советы доводы по этому поводу?
в LV
Кстати весной к Вам приезжаем, будем делиться опытом в разведении кроликов))
Вчера поймал порцию адреналина. Сидел ковырял 230 прошивку, почему-то не реагирует 8-й канал, хотя подвес стабилизирует нормально но на входе сигнала не видно, торчит значение 1500. Была вставлена 2S батарейка, дышащий режим. И дернул меня черт поставить режим “gimbal” в ГУИ. Реакция была жесткой - моторы рявкнули и коптер рванул. Спасло то, что проводом сбило один винт и аппарат забился в угол с переворотом, там и остался, вращая моторами, естсственно, ни на какие сигналы с ДУ не реагировал, Кое-как пробрался между винтов и выдернул разъем. На удивление, обошлось только одним слегка побитым винтом.
У меня подобная история была на днях на квадрокоптере с НАЗА - квадрик начал крутить винтами после обновления версии прошивки, хотя и был подключен в ЮЗБ порт компьютера.
Так же ситуация была на ранних прошивках с Кроликом, летом тяжелая гекса после перепрошивки тоже решила полетать по студии, потолок то сих пор порубанный местами от 13х6.5 АРС пропов…
Сейчас эта проблема я вижу убрана в софте. Кроме того fail safe у меня отрубает моторы, так же эта функция настроена на канал GEAR, как у вертолетчиков. Поэтому если аппа включена и сигнал есть - можно чуствовать себя спокойнее. Хотя после той ситуации у меня наверное навсегда осталась привычка подключать коптер в закрытом помещении через 12вольт блок питания, чтоб далеко не улетел 😁
где конкретика.
Скорее всего в ответах на правильно заданные на форуме вопросы =)
Спасибо Владимир за полезные каменты! Вуконга мы отдали, перекрестились и решили больше не связываться.
Мы специализируемся на МК, как проверенном годами контроллере с “неподмоченной” репутацией - под него и спроектирована рама, однако систему виброразвязки можно зажать в ноль, дело не в ней 100%, мы рассматривали этот вариант. ЖПС и центр масс конечно же в программе выставили при настройке. А с бек как получилось - сам в шоке!
Что касается полетных качеств платформы(без использования рюшечек) - то я еще ни одного тяжелого Вуконга летающего на уровне МК не видел.
Тоже дошли руки до Вуконга 😎
Краткий отчет:
Сетап коптера:
Полетный контроллер: DJI Wookong-M+GPS
Регуляторы моторов: 60A RAPIDESC (by os-propo)
Безколлекторные двигатели: U28L Pulso 760kv (UAV Series)
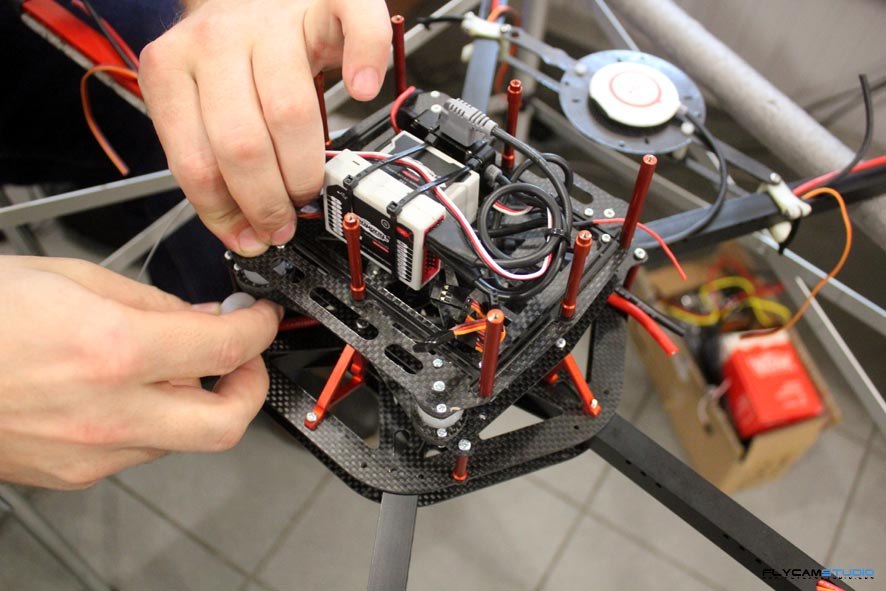
Рама: TOP-MK10-6 Carbon (flycamstudio)
Пропеллеры: APC E13X6.5
Аппаратура управления: FUTABA T8FG Super
Разьемы: EC5
Батареи: 2х5800 4S
Подвес простенькая 2х осевая копия ORION H3 местной разработки.
При подключении серв к Вуконгу - они скоропостижно скончались (плохо читал рекомендации)
Оказалось что бек у них в комплекте за 1200$ - говно. Вешать на него нагрузку - не надо.
Что касается последнего пункта в меню настройки Voltage Protection Swich ON
программа выдает кучу ошибок, в том числе с предложением перекалибровать трансмиттер
PMU& Аккумулятор ERROR.
Коллега посоветовал отключить эту функцию, если на “фановом” коптере - ее можно и использовать, то на рабочем аппарате - необоснованный риск. (при некоректной настройке/жесткой просадке аккума, коптер с подвесом и камерой может захотеть сесть на дерево/дом/воду и т.д.)
Следующей проблемой обнаружился чрезмерно высокий уровень газа при старте. Ну очень высокий, хотя програмно он выставлен на минимум. Мыслей кроме как допилить уровень в газа в регуляторе подключив к СС и откалибровать серез ГУИ ОупенПилота не нашлось… В ГУИ к Вуконгу регуль тоже можно настраивать, но в диапазоне 1144-1208 мкс, причем есть только 3 варианта: Low, Recommend и High.
А в прошивке СИМОНКА которую мы используем Min Gas 1060 мкс, поэтому на 4S получается “пистолетный” старт и motor stall.
Мой напарник Сергей с помощью CC передвинул нижнюю границу старта мотора в регулях точно на 1125 мкс, при 1144 мкс вуконговского “Low” моторы плавненько крутятся. Есть куча других способов это сделать, но мы предпочитаем точный и однозначные джидайские методы.
Одним словом, недоработка софта, вернее, его заточенность под “домохозяек” на каждом шагу.

Подведя итоги - потратив неделю (или больше) на сборку этого коптера мы разобрались с вражеской электроникой от ДЖИ, получили практический опыт настройки, это была хорошая возможность провести тесты, сравнив и сопоставив как работает Вуконг на нашей раме в сравнении с другими полетными контроллерами которые мы используем.
Что понравилось:
- Удержание по GPS и высоте - очень четко держит.
- Калибровка компаса - удобно и просто.
Что не понравилось:
- Отдельный бек. Я так понимаю, он большие сервы не тянет, нафиг тогда нужна отдельная коробка?
- Настройки Min Gas. Это китайцы отожгли,
- Стабилизация. Как не крути, немец (он у нас очень хорошо отстроен) летает куда лучше, главным образом из-за гибкости контроллера - почти все параметры в Gyro перенастраивались. Здесь по сути только два гейна (Basic и Attitude), их возможностей не хватает. Еще не нравится отработка рудера, в МК мы настроили “вертолетный” руддер с очень четкой отработкой без лишних движений, а здесь сопля в тесте или перекомпенсация .
- Красный глаз. Для настройки он информативный, но просадку напряжения по нему смотреть неприкольно.
А почему бы Вам не перешить регули если требуется надежность? сверьте со списком, может совпадут? www.rapidesc.com
Знаете, я тоже сравнивал одно время… а на деле особо нет смысла их сравнивать. В отношении количества так называемых “рюшечек” преимущество на стороне Кролика, ведь Naza не имеет в списке дополнительных опций как возможность подключения сонара, благодаря которому мультикоптер может в прямом смысле слова чувствовать землю. Это очень здорово, например при полете от первого лица (fpv) щелкнув тумблером, активировав этот режим коптер будет “скользить” над поверхностью без риска неудачного соприкосновения с планетой. Однако у пользователя Naza аргументированным ответом будет что высококачественный датчик давления воздуха позволит Назоводу зависать даже в близости от земли, в то время как у коптера с LoveFlight Rabbit работа барометра будет чувствоваться только на высоте два метра и более.
То же самое касается удержание в точке по компасу и gps, автопосадке и “возврату домой” – благодаря отлаженным алгоритмам и качественным датчикам – удержание с контроллером от DJI происходит несколько качественнее.
Тогда почему спросите Вы несмотря на такие преимущества Naza – тысячи коптероводов во всем мире выбирают Кролика? Да хотябы изза цены, ведь вместо одного набора Naza c GPS можно купить три набора LoveFlight Rabbit с GPS и сонаром!!
если будет интересно -ссылка на полную статью
Видеотест NAZA и RABBIT в помещении:
Вобще тестилось четыре квадрика, точнее контроллера - СС3D, Rabbit, MegaPirateNG, Naza.
Горизонт лучше всего держит СС, точку по ЖПС в наших палестинах лучше всего точку держала NAZA, а Кроль приятнее всего в управлении.
Присоединяясь к поздравлениям хочу поздравить всех с приближающемся Новым Годом! Желаю всем осуществления задуманного, множества интересных идей и успехов в реакции самых смелых проектов!
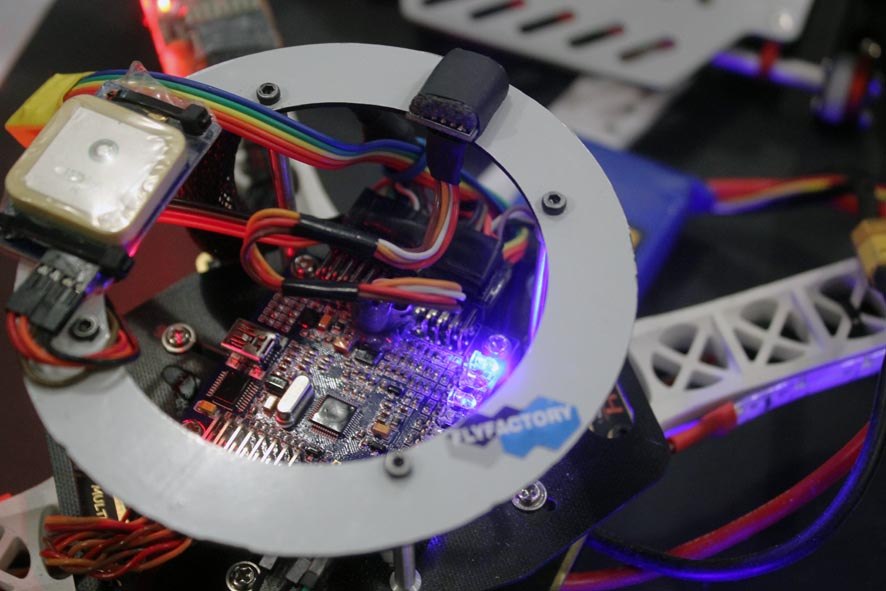
Вы думает что перпендикулярность имеет значение?
У магнитометра ориентация осей как на картинке. Сложно сказать, что там в прошивке. Но я экспериментировать с поворотом платы не стал. Ведь магнитометр трехосевой. А от работы магнитометра напрямую зависит как коптер будет удерживать позицию и возврат домой с помощью GPS.
Возможно калибровка поставит все на свои места, ведь у вас оси как бы инвертированы.Во всяком случае, можно понаблюдать за поведением коптера в двух положениях платы “правильно” и “неправильно”, и исходя из этого понять разницу.
Замечание принято, исправлюсь!
У вас плата компаса задом наперед стоит по отношению к основной плате? Или у меня что-то с глазами?
Думаете это имеет значение? Я его все равно калибрую. Возможно неправ, неспорю. Как бы там ни было на удержание в позиции оно влиять не должно как бы. Попробую поднять выше, запас есть)
навая волна бэтатестеров)) кто-нибудь уже прошивал?
Аналогичный вопрос - кто уже пробовал прошивку 23ю, стоит с ней вобще ковыряться или оставляем 22ю?
Я поднял компас на 5 сантиметров на 22й, но ЖПС унитазит все же, калибровал в не самом благоприятном месте, на парковке возле работы. Возможно в поле это лучше производить но нет возможности.
Виталий, я и предлагаю в программе заливать прошивку 1.211 по ссылке.
Это можно было бы сделать и в старой гуи, но там некорректно отображаются данные последних прошивок, поэтому ж и нарисовал новую.
А за пояснения спасибо, очень полезная информация.
Предлагаю потестить новую Русскую GUI для настройки полетного контроллера LoveFlight Rabbit
Программа является модернизированной и адаптированной для русскоязычных пользователей версией Love Flight Tools For Rabbit Flight Controller V1.210. Основные изменения:
-Переведены функции, нужные для конфигурирования параметров мультикоптера на плате LoveFlight RabbitFC.
-Убраны ненужные на мой взгляд ползунки в настоечном интерфейсе, они только сбивают с толку. Все равно мало кто понимает что там и для чего надо подстраивать. По большому счету большинство пользователей просто выбирают готовую конфигурацию по габаритам рамы и пуляют.
-Произведена перекомпановка разделов, это дало возможность сжать программу в размерах что позволяет теперь на моем ноутбуке увидеть полностью все окошко, включая показания переферийных устройств). С этим неудобством сталкивалось я уверен большинство пользователей, т.к. даже при разрешении 1024*768 возникали проблемы.
-Ну и приклеил веселую иконку с рожицей кролика вместо унылых кубиков.
По пунктам вроде все должно быть понятно, если где ошибся - поправьте)
Софт для Windows, сборка от 25 сентября 2012 г.
Скачать программу настройки: www.flycamstudio.com/files/RabbitGUI_Rus.exe
Скачать прошивку:flycamstudio.com/…/lfmc_fw_20120620_v1211.bin
Cкачать архив сборки, включая драйвера для платы, английскую и китайскую версии ПО: www.flycamstudio.com/files/Rabbit_Tools_Rus.rar

ЗЫ Я оттестировал софт на своем квадрике вдоль и поперек, но все же должен довести до Вашего сведения что ПО экспериментальное,
при неверной настройке коптера возможно что угодно - то есть вы пробуете ее на свой страх и риск.
Прошивка поддерживает все платы LoveFlight Rabbit FC, в случае возникновения ошибок при перепрошивке платы - откатитесь на предыдущую версию, Rabbit Flight Controller 1.2 (от 18го марта 2012 года) fw_20120318_v1202.bin
ЗЗЫ Четыре крутилки в русской гуи считаю потолок, наш технический человек Сергей Аникеев настаивал оставить вобще одну только крутилку (на гиры)😎
Порше это драгонфлай) а мк так, мерседес максимум))
Не, ну как бы не совсем правильно сравнивать мозг коптера с автомобилями, полетный контроллер - это могз сердце коптера,
от его настроек напрямую зависит конечно как коптер будет себя вести, но не менее важен правильный выбор регуляторов, рамы и моторов. То что предлагается в китах от микрокоптер.de извините до хьюндай не дотягивает)
Андрей, а как вам его присылают? Они почему-то в Россию не высылают “мозг”…
Костя, в действительности полно интернет - магазинов которые являются дилерами электроники MikroKopter, которую без труда можно заказать с доставкой до дверей)
Спасибо, вот только дата там смущает “26 Май 2011” (она меняется у “следующая” статей), вроде кролей тогда еще не разводили 😃, а в конце: “Обновлено 01/04/2012”
Просто раньше блог велся на ЖЖ, а когда переехал на сайт я подтянул старую базу с ЖЖ, в котором немножно другая структура. Кстати на Кроля новая ГУИ русская, я в соответствующей теме выложу сегодня обязательно)
Раньше, во времена когда действительно было сложно достать немецкую платку - мы перебивались Китайскими клонами, ну а чуть позже появился замечательный отечественный проект UAMK, от немцев требуется только прошивка, все остальное у нас ведь есть)))
Сейчас, когда большинство вопросов с покупкой какой-бы-то-ни-было электроники отпал, то вопрос как написал выше Александр, конечной составляющей выбора платы является ее цена, ну и сфера применения в которой она будет использоваться.
Спасибо, вопрос культуры не начинать общение не представившись.
Контроллеры используем традиционно немецкий микрокоптер для профессионального использования, coptercontrol (на нем много летаем, являемся офиц.тестировщиками платформы, много внедрили своих рюшечек, активно используем платки второй версии на подвесе, об этом обязательно опишу в соответствующей теме) ну и последнее время испытываю большую симпатию к контроллеру love flight, который Кролик в народе - просто здорово летает он!))
Всем привет,
Давно поглядываю за новостями в этой ветке, все собирался завести учетку на рцдизайне, та все руки не доходили.
Меня зовут Андрей, я из Киева. Работаю в фирме по разработке мультироторных платформ для съемки с воздуха.
Ниже коллаж с некоторые из реализованных мной квадриков. Стараюсь быть в теме и буду рад общению с единомышленниками на дружественном ресурсе;)
В общем принимайте в сообщество!
