Activity
Очевидные плюсы CAN в возможности вешать на штну неограниченное количество регуляторов, возможность их удаленно полностью контролировать, перегружать, менять параметры, полная телеметрия и обратная связь. По надежности - на практике выходит - чем длиннее CAN шина, тем устойчивее. Используется как знаете в современной промышлености, автомобилестроении и… мультикоптерах хай-энд серии. Однако это вовсе нетозначает что Шим контроллеры двигателей не имеют права на жизнь, в некоторых проектах они бывают очень кстати. Тем более что большинство полетных контроллеров не умеют работать ни с чем более. А вот на многобаночных (8s и более)системах Шим уже недостаточно для отработки плавности хода.
Уважаемое сообщество, подскажите где копать?
МК, Прошивка 206а, все работает как часы, летал - радовался жизни… пока не подключил ОСД… Полетные характеристики не изменились, однако вместо параметров с полетного контроллера вижу поверх картинки с бортовой камеры на мониторчике только:
NAVICTRL MODE 20130824-1115…
Через модем из гуи телеметрия валит отлично…
Однако хочеться видеть данные издалека, а далеко возможно только через видеотракт. Фотко мозгов, для наглядности. Вроде не совсем чайник и подключал все согласно рекомендациям из вики.
Буду признателен за советы.



Володя, Вы все верно два поста назад описали. Какие же на 5015 это тежеловесы? По современным меркам коптер под 5D это уже так… среднячки…😉
Поставил на третью ось перемотанный U8 от RCTiger (плотно 60 витков на зуб, 14 Ом на выходе). Даже если очень постараться - сорвать такой мотор крайне сложно. Общий вес с камерой 2.8-3.5кг в зависимости от объектива.

У меня 8108 стоит на третьей оси подвеса 2кг. Работает нормально, но избытка мощности не ощущаю. На скорости более 60 км/ч ветром иногда срывает. 5208 точно будет мало. Или снимать только в штиль при идеальной балансировке.
За два с лишним года - контроллер не отказал не разу, я не хочу укореняться в их разборки с мультивии, но то что ЛафФлайт (огненная бабочка - немецк.) в отличии от мультивии летает почти из коробки - я думаю многие на форуме смогли убедиться. Отбрасывая сонары, бародатчики, жпс и прочие ненужности… квадрик отлично управляется на ручках, для людей которым в кайф полетать! Аминь.
… тоже кролик летает, из первых комплектов. Менять не собираюсь). будет строиться новый коптер, тогда будет и новый контроллер…
Использую Q-brain 25А на тестовой платформе под ОР, неспешно использую, летал несколько раз, срывов конечно с такими как у меня на квадрике моторчиками не наблюдалось, да и откуда им там взяться? 😎
Подкупила такая схема своей компактностью. Конечно практичнее на “рабочих” сетапах использовать классические регуляторы, что облегчает их дефектовку при разного рода неприятностях, которые впринципе неизбежны с авиамоделями, рано или поздно.

У меня такие две штуки на окте х8. Летаю на 6с
goodluckbuy.com/sky-30a-four-in-one-brushless-esc-…Прошивка была отстой. Были срывы синхры и х\з что ещё. После прошивки стало нормально. Поэтому верить, что там нормальная прошивка, не стоит.
Для прошивки любого регуля достаточно ардуинки с юсб.
Можно ссылку на новую прошивку, и вроде компас калибруется там по новому, можно узнать как.
С прошивкой разобрался, действительно стало удобнее. Но вот вопрос с калибровкой компаса, есть однозначные пруф линки?
Я конечно бегло просмотрел вопросы пользователей связанные с этой ошибкой по ветке. Были стандартные вопросы как откалибровать контроллер, советы воспользоваться пунктом advanced imu calibration (хотя одно к другому вобще ни как не вяжется!!) Мне тоже кажется что проблема с магнитометром, банально непропай или глюкавая партия, хз.
Потому что Наза тупо новая с коробки и никаким падениям при транспортировке или установке ее на носитель не было места.
Ребята, может кто сталкивался и смог осилить ошибку27 в Naza. У меня удается избавится от нее только заменой модуля ЖПС\Компас на заведомо исправный. При калибровке ЖПС выдает каждый раз красное мигание светодиодами, и в гуи как известно ERROR [27] - ]. GPS not calibrated, or magnetic field interference.
С моим рабочим модулем - висит тупо идеал, возможно при минимальном вмешательстве можно побадить этот глюк ДЖИ, или таки настаивать на замене модуля диллеру?
Однако используя 3-D печать, печатают подвесы и успешно с ними летают. www.multicopter.ru/forum/viewtopic.php?f=9&t=2738&…
Вы беретесь утверждать что с ним ктото уже летал?
закидывайте видео с камеры тоже! сейчас болтающем ригом никого не удивишь! да и не понятно нифига! китайский тоже с виду все отлично а видео гуляет
Прошу сильно помидорами не бросать. Вторая попытка снять одлинный кадр с стедика на бк-моторах. Kinetiq in Central Park (Klaypex Remix)
я не виноват, это хваленый айфон5 так снимает видео)
Значит переснимем…
Первый тест работы нашего подвеса Kinetiq на риге. Прошивка 2.2. Результатом доволен =)
Cерега, компас вывожу отдельно, на “прозрачную” площадку между лучами. На видео ее хорошо видно.
Как и обещал видео демонстрация как это работает на нашей гексе.
Расскажу о изменениях которые пришлось применить к проекту, когда штатной светодиодной индикации нехватает.
В случае с тяжелым гексакоптером для видеосъемки - просто необходимо видеть носитель из далека, понимать его ориентации в пространстве.
С случае с использованием полетки LoveFlight, так же как и Vookong или ZeroUAV крайне необходима световая индикация, так как именно с помощью “языка” светодиодов, описываемого в инструкции пилот может понять - какие процессы происходят в мозгу коптера.
Как минимум это дышащий режим, готовность к полету, калибровка датчиков и другое. Полетный контроллер на котором размещены светодиоды в нашем случае изолирован от внешнего воздействия в дюрале-карбоновом каркасе, а вывод мощной светодиодной подсветки к штатным местам в последний раз привела к отплавлению транзисторной цепи на контроллере. Как вариант вывести трехкристальную моргалку - аля вуконг не вариант, поэтому к делу подключились профессионалы =). Посредством несложного контроллера нам удалось объеденить понятия штатной системы светоиндикации с применимыми на наших рамах трех-кристальными лентами для ориентации носителя при дальних отлетах.



Ссылку на видео чуть позже.
А чегойта джедаи переметнулись на темную(бессколекторную) сторону силы? Ведь совсем недавно кто-то на каждом углу обсирал идею бесколлекторных подвесов и восхвалял сервы? Проституция? 😉
Дима, видимо вы неправильно истолковали мои предыдущие комментарии, конечно в видеоролике возможно человеку со стороны покажется это критикой, но в самом деле я имел ввиду что конечному заказчику нет никакого дела до технических деталей, например устройству подвеса, который является лишь инструментом для реализации задач.
Какая разница: на серводвигателях, шаговых, коллекторных или безколлекторных, с редуктором на шестернях или ремнях - важен результат, качество материала отснятое с носителя. В то время как вы трудились для хелидиректов, в киевской студии тестировался свой прототип гироголовы стабилизации камеры на безколлекторных моторах. На самом деле еще до появления массовых алексмосов и мартинесов - идея создания подвеса не уступающему качеству стабилизации системам используемым в кинокранах одна из наших основных задач. Ведь не нужно быть ясновидцем, что бы понимать, что такие решения будут иметь спрос и не ограничиваются одними только мультикоптерами.
Однако в погоне за эксклюзивностью управляющей электроники нами был выбран ошибочный путь. В основе идеи лежало использование шаговых моторов и создания собственного контроллера управления. Четыре месяца ушло на то что бы понять, что космическая идея компактной головы для фотоаппарата на шаговых двигателях не реализуема. В то время уже появились первые ласточки на любительских форумах с видеороликами где зритель видел непривычно плавную картинку с гоупро, установленной на закрепленный к квадрику подвес на безколлекторниках. Некоторое время мы смотрели на всю эту историю с иронией, да и в личной переписке с Алексеем - разработчиком увлеченным идеей “народного” подвеса на бк, наш екс-технический директор Сергей не пришел к единогласию о реализации и условиях сотрудничества, однако сама концепция использовать безколлекторные двигатели вместо шаговых моторов виделась замечательной идеей. Тем более что уже тогда DJI довольно успешно начала продавать на глобальном рынке свой Z15 для недозеркалки NEX5.
Некоторое время спустя, углубившись в изучение вопроса стало очевидно, что для управления мотором нужен регулятор который будет получать сигналы с платы стабилизации CopterControl от OpenPilot, удачно зарекомендовавший себя на наших сервоподвесах F3X. В качестве контроллера двигателей были выбраны регуляторы немецкой компании aerolab, прошивка которых позволяет использовать контроллер в асинхронном режиме. Однако как вскоре выяснилось для достижения результатов нам не хватает самого малого, того что есть в каждой серве - обратной связи с мотором, энкодера помогающего электронике определять угол отклонения оси. Известно что с этой же проблемой уже не первый год борятся австралийцы из фотофигеров, показывая время от времени на выставках свой несложившийся подвес на моторах прямого привода. Повторять такие подвиги - откровенно не готов, поэтому реализацию электроники стабилизации мы оставили нашим партнерам, а освободившись от разработок электроники смогли полностью сконцентрироваться на реализации механики, что у нас выходит гораздо лучше. Переработав предыдущий вариант консольного подвеса, нам удалось реализовать инструмент удовлетворющий все требования к видеосьемке с DSLR камерой. Не просто как любят местные умельцы - повесить оси на моторы, а разгрузить их в поперечном направлении оставив им отрабатывать исключительно вращательные движения, в следствии чего достигается наибольшая плавность движения камеры по осям. По балансировке мы испробовали разные варианты - от фикса до эльки 24-105. Все три оси балансируются под другую оптику за несколько минут. Ролик демонстрирующий работу гироподвеса, хотя думаю Вы его уже видели.
Работа такая, на самом деле все норм. Техника надежная, съемка застрахована, пилот лицензирован.
Ну вот начинает получаться с моторчиками и у нас 😃
Видеоматериал можно считать техническим, материал не содержит постобработки - цветокора и стабилизации. Все это снималось на обычную рабочую окту с подвесом на бк двигателях. Камера 5D MKII, общий вес комплекса в воздухе 6.5 кг, батареи 2 Х DP 6200 4S.
Результат работы над проектом “защищенного” мультикоптера с несущей композитной рамой.
Напомню техническое задание:
Разработка мультироторного комплекса, предназначенного для дистанционного контроля с высот до 250 метров на расстоянии до 2 км от наземной станции с ручным управлением при прямой видимости, с продолжительностью полета 30-40 минут в режиме зависания, полетам по точкам с возможностью “горячей” корректировки маршрута и автоматическим возвратом на место взлета. Легкий, устойчивый к любым погодным условиям носитель, позволяющий использовать его для видео наблюдения в городской застройке. Носитель, позволяющий в режиме реального времени передавать и записывать видео на портативный компьютер и выполнять фотографирование.
Аппарат оснащен стабилизированным подвесом. Наклон и зум камеры можно откорректировать во время полета прямо с пульта. Аппаратом можно управлять в полуавтоматическом режиме и при использовании внутри зданий, используя видеоочки с технологией FPV (First Person View).
Полетный контроллер выбран OpenPilot Revolution, пока летаем без нави, в трех режимах - rate, altitude, axis lock(последний очень помогает вернуть аппарат с дальних расстояний при потери ориентации - квадрокоптер всегде повернется хвостом к пилоту как запомнил при старте), контроллеры двигателей N2N от Aerolab.de, моторы - небезизвестные W4822 от Maximus-racing, пыле-влагозащищенная рама нашей разработки, 15*5 винты, типичный двух-осевой подвес на БК для камеры Gopro с отдельным питанием от амперной батареи на площадке внизу. Бортовое питание от 5100 5S Dinogy.





Андрей, тоже гоняю аналогичные регули и обратил внимание что на немце изменился PID… причём почти в 2 раза, у вас также? Можете чиркнуть какой сейчас PID в полётке и какие настройки в регулях? У меня на пепелаце весом около 2кг (квадрик) PID пока 60 - 80 -5 (вместо стоковых 100-120-8)
p.s ПИД поменялся и на DJI, а вот на CC нифига, правда прошивка CC от 19 августа 11-ого года (новые чё-то лень пробовать было).
Влад, может поделитесь опытом настройки, не удается мне настроить ПИДы на большом квадрике,
как я писал на маленьком (МК2.1\N2N45А\2217\12x45\450mm frame) все было зашибись c 80-100-8.
Как только сетап подрос ((МК2.1\N2N45А\4822\16x5\1000mm frame) сразу начались вопросы (перекомпенсация)
А какой у Вас диаметр корпуса?
В тестовй раме композитного квадрика заложен полезный диаметр по дну, 15см под раздатку, и расшряется до 18см по форме.
Можете чиркнуть какой сейчас PID в полётке и какие настройки в регулях? У меня на пепелаце весом около 2кг (квадрик) PID пока 60 - 80 -5 (вместо стоковых 100-120-8)
p.s ПИД поменялся и на DJI, а вот на CC нифига, правда прошивка CC от 19 августа 11-ого года (новые чё-то лень пробовать было).
Влад, настройки действительно вышли довольно необычные, подбирали эксперементальным путем для связки 12*4.5 и 4S понравилось больше всего 80-100-8, вот скрин:

Сейчас уезжаем в командировку, по возвращению соберу все железо на жертвенной раме что бы облетать с СС и Кролем чтобы сравнить. Времени катастрофически не хватает из-за основной работы.
В общем обязательно поделюсь впечатлениями.
Я настраиваю кролей на отключение газа при фэйлсейве, это небольшие квадрики поэтому в худшем случае при падении в кусты согнется луч.
Тяжелые немцы при потере сигнала аппаратуры - на минимальном газу опускаются и через девять сек отключают моторы, чтоб не травмировать персонажей снизу.
Автовозвраты домой при фейлсейфе - редкостная ересь, активируя на свой риск эти функции помните, что за ущерб и травмы причиненные улетевшим упавшим коптером ответственность несете Вы а не производитель полетного контроллера!
И не забывайте снимать винты тестируя первый раз фейлсейв.😉
Я к сожалению все еще в коммандировках, в ближ дни дам все цифры, графики, пароли и явки;)
Самолеты безкрылые)
Диаметр коробочки 18мм, с расчетом чтоб в нее помещалась раздатка с регулями, ну и FC с нави поверху. Собственно желаемый сетап по железу, как я писал собран. Фрезеровщик подвел немного, перед праздниками загулял 😃
Конфигурация:
Полетный контроллер Mikrokoper FlightCtrl 2.1
Моторы Maxicopter C4822 - 390кв - 300ватт
Kонтроллеры двигателей 2N2N-BLMC-STM32-SL45A
Силовая раздатка и конвертор - Stromverteiler I2C-CAN
Провода 16AWG, 18AWG / 10AWG силовые на ЕС5
Что бы не тратить времени попусту все это мы водрузили на тестовую раму (жертвенный квадрик) чтобы облетать это дело
Сюда добавляем:
Пропеллеры 12*45 EPP (максимум что влезает)
Батарея 5800 4S - другой на 4 банки попросту не нашлось под рукой.
С оговоркой что оптимизацией конфигурации не занимались, полетный тест показал полетное время 24 минуты. Это совсем не много для такого сетапа с емкостной батареей, такой спеку лист конечно не претендует на рекорды, просто для того чтобы убедиться что все работает, этап подготовки “железа”.
В спек композитной версии я заложил 15е пропы.
www.youtube.com/watch?v=SwAxWkzNjnc
Ахренеть…, почти 800 евро за полуфабрикат…
Это реально круто…
Ну да, я собственно про эту раму и писал в посте за 07.04.2013 15:05
А наш проект движеться но не так быстро как хотелось бы. Корпуса отдали в малярку, вышло 121 грамм с покраской. Сегодня кстати приходили военные, прониклись идеей.


Ну а пока остальные запчасти для рамы в работе (фрезеровка и анодирование) накинули электронику на жертвенную раму (украинский клон ХК450), удивительно как топовые моторы max-racing по 117$ стали в отверстия на лучи вместо мотормацнтов, на те же родные отверстия 2,5мм, как будто это в раме за 20 долларов предусмотрена посадочное под них)))

Ну так и я ж об этом! Безпилотника из него делать ненужно, а для AP&AV ничего больше и ненадо 😃 Замечательно летает и управляется!
Вот такой робо-кроль был собран на скорую руку из подручных материалов:
Они пришли в наш мир, что бы оставить глубокий след в истории и умах множества поколений!


Собрал его как жертвенный квадрик, чтоб не обидно было его разложить об планету. А получилось что аппаратец месяц спасал нас в Индии, и остался работать там даже по нашему отъезду домой =)
За месяц ниразу даже в гуи не заглядывали, просто залил прошивку и оттримировал.


зы_ Естественно что никакими жпс-ами не пользовались, пару раз автопосадку включал.
Вы совершенно правы. Я хочу разделить задачи по этапам.
Конечная цель проекта – создать профессионально ориентированный высокотехнологичный мультироторный носитель, полностью защищенный от внешних воздействий. Со встроенной виброразвязкой, складывающимися лучами и топовой электроникой, заточенной именно на профессиональное использование.
Тема создана не для того что бы похвастаться на форуме формованной коробочкой. Это начало проекта, на много страниц. Прежде всего требуется отработать принципы в технологии реализации защищенного корпуса. При проектировании первой формы - про вакуум и формовку знали мало, не очень удачная с точки зрения технологичности вышла, на выпуклостях формы стеклоткань разъезжается и образуются пузыри, каждый корпус ювелирная практически работа. Первый так сказать блин ))
Но безусловно радует что мы не одни, кто думает и прилагает попытки реализации композитного корпуса на смену текстолитовым пластинам. Развитие не стоит на месте, я думаю что годик два и рынок хоббийных и профессиональных мультироторных платформ это будут две большие разницы.
Кстати, держали в руках топовую цельноформованную голландскую раму от uavframe, и скажу вам что реальность реализации сильно отличается от того что мы видели на картинках в каталоге и в видеороликах.
Ага, а я воспринял как под#@ку ) Ок, ну мы вроде уже выяснили по этому вопросу =)
Саша, Вам как автору замечательного подвеса с бк, подково-подвеса на сервах а так же дюжины утонченного вида квадрокоптеров, с высоты славы конечно лучше видны наши приземленные попытки и барахтанье в поисках новых решений промышленного дизайна в мультикоптерах. Однако я думаю часть людей со мной согласится что изделие должно быть в закрытом корпусе, а не набором плат на текстолитовой пластине кишками наружу.
… о, я тож делал композитную раму для квадрика. Проскакивал где-то на форуме, в виде “пельменя”. Но лично мне такая конструкция не очень понравилась. Много разных внутренностей, которые нужно как-то закреплять. Решил вернуться к более традиционным вариантам, т.к. заморачиваться с формовкой, считаю есть смысл при закладке хоть какой-нибудь серии… имхо
Виталик, сознайтесь, Вы просто опустили руки столкнувшись с определенными трудностями при реализации, я же пытаюсь заложить все исходные требования на этапе проектирования. Наоборот, это замечательно когда вся электроника будет удобно расположена под одной крышечкой. Это так же логично, как двигатель под капотом в автомобиле!
Угу, и вот спустя месяц проб, ошибок и отбраковок прототипов, мы подобрались наконец к идеальной на наш взляд комбинации стекловолокон и смол сочетающей легкость с прочностью рамы квадрокоптера.

Давно эта идея зрела в моей голове, но постоянно откладывалось в силу различных причин. И вот наконец то появился повод реализации задуманного. Началом стала наша работа над проектом “защищенного” мультикоптера с несущей композитной рамой. По сути такие рамы - это логичный виток в спирали эволюции мультироторных платформ.

Техническое задание:
Разработка мультироторного комплекса, предназначенного для дистанционного контроля с высот до 250 метров на расстоянии до 2 км от наземной станции с ручным управлением при прямой видимости, с продолжительностью полета 30-40 минут в режиме зависания, полетам по точкам с возможностью “горячей” корректировки маршрута и автоматическим возвратом на место взлета. Легкий, устойчивый к любым погодным условиям носитель, позволяющий использовать его для видео наблюдения в городской застройке. Носитель, позволяющий в режиме реального времени передавать и записывать видео на портативный компьютер и выполнять фотографирование.
Аппарат может быть оснащен гиро-стабилизированным подвесом. Наклон и зум камеры можно откорректировать во время полета прямо с пульта. Аппаратом можно управлять в полуавтоматическом режиме при отсутствии сигнала GPS или при использовании внутри зданий, используя видеоочки с технологией FPV (First Person View).
Технические требования:
Допустимый полетный вес – 3кг., полезная загрузка 1кг.
Длина маршрута (периметра) по GPS - до 500м от точки взлета.
Устойчивость к погодным условиям: скорость ветра до 7-10м/с, температура воздуха -25 - +40град цельсия, осадки – моросящий дождь или легкий снег.
Первые у нас в студии. Добились веса конструкции состоящий из двух частей в 120грамм.



Каждый коптер индивидуален, не представляется возможным посчетать ПИД математически, в некотором образе “тыкаться” приходится с каждым коптером, если конфигурация хоть немного отличается.
Ненужные на мой взгляд. Найдите десять отличий))
Так и не дождавшись однозначных ответов - собрал как есть.
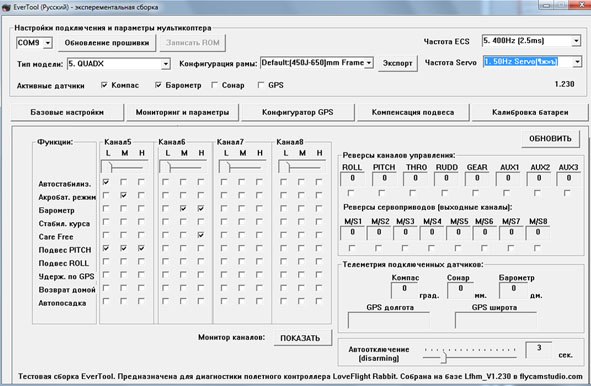
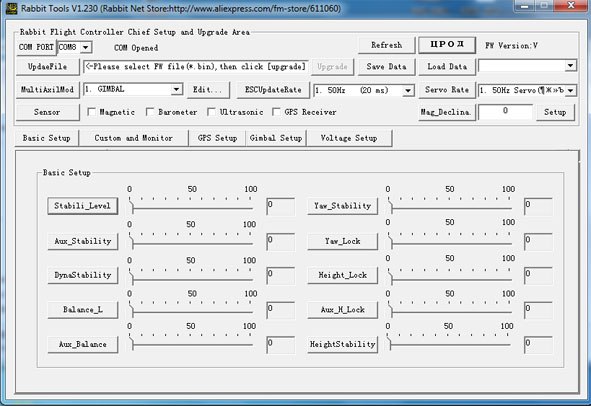
Предлагаю потестить и прокаментить, поправить мои ошибки в русской тулзе настройки полетного контроллера LoveFlight Rabbit с 23й прошивкой.
Программа Everfly_Tool_RU230b является экспериментальным ПО, однако с полнофункциональным интерфейсом, собранным и модернизированным на базе Lfhm_FW_V1.23 с адаптацией для русскоязычных пользователей.
Основные изменения по сравнению с оригинальной Lfhm_FW_V1.23:
• Интерфейс программы подвергся незначительной переработке с целью более удобного выполнения рутинных процедур конфигурирования мультикоптера.
• Адаптация программы на русский язык.
• Пункты меню настройки стабилизации полетного контроллера изменено согласно логике аналогичных полетных контроллеров.
• Убраны не нужные на мой взгляд ползунки и пункты в настоечном интерфейсе, они только сбивают с толку.
В целом логика интерфейса осталась прежней и привычной, поэтому переход на русскую сборку не будет дискомфортным для пользователей полетного контроллера LoveFlight, наоборот надеюсь сделает работу с GUI еще удобнее.
Софт для Windows, тестовая сборка от 25 января 2013 г.
Cкачать русский архив сборки, включая драйвера для платы и инструкцию на русском: EverTool_V23b.rar
Скачать программу настройки отдельно: Everfly_Tool_RU230b.rar (архив с исполняемым файлом, просто скачайте его в корень 23й прошивки, распакуйте и запускайте настройку с него)
Cкачать оригинальный архив сборки, включая драйвера для платы: Lfhm_FW_V1.230_20121209.rar (китайский и английский язык)
Инструкция по настройке коптера в программы Everfly_Tool_RU230b (в процессе наполнения)
ЗЫ Это тестовая версия, как бы бета. Я оттестировал софт на наших платах, но все же должен довести до Вашего сведения что ПО экспериментальное, при неверной настройке коптера возможно что угодно - то есть вы пробуете ее на свой страх и риск.
Так же как и некоторые параметры могут быть истолкованы мной неверно, поправляйте - буду вносить поправки.
Буду благодарен за Ваши отзывы о работе программы на форуме.
С уважением, Андрей Палеха
Согласен с Вами, будем исправлятся
Поэтому и поставил вопрос.
Мое видение:
Чуствительность баро\сонар (Height Lock)
Общая чувствительность удержания. Смягчает амплитуду ручки газа в активированном режиме удержания, регулятор высоты до уровня парения.
Зависимость баро\сонар (Aux Height Lock)
Зависимость газа при превышении нужной высоты, чем выше значение - тем меньше область “перепрыгивания” нужной высоты.
Амплитуда баро\сонар (Height Stability)
Малейшие изменения давления имеют больше влияния на газ. Больше значение – большая чувствительность к небольшим изменениям давления, меньше значение – уменьшенная чувствительность к небольшим изменениям давления.
Предложения для понятности обозначить эти пункты в GUI как
Main Altitude
Altitude P
Altitude D
Однако нужно подтверждение общественности.
Всем привет)
Давайте поговорим за настройки высоты, за что отвечают три последних ползунка в настроечном окне 230й прошивки.
Дело в том что в 12й все было по другому

В 21й я их попросту убрал что бы уменьшить экан.

А вот теперь в 23й хочу вернуться и разобраться – что да как, мне показалось или эта теме в ветке не раскрыта? Пересматривая этот вопрос захожу в тупик.
Вопрос по поводу:
- Height Lock
- Aux Height Lock
- Height Stability
Можно растолковать как:
- Чуствительность баро\сонар
- Зависимость баро\сонар
- Амплитуда баро\сонар

Ваши мысли, советы доводы по этому поводу?
в LV
Кстати весной к Вам приезжаем, будем делиться опытом в разведении кроликов))