Activity
Я знаю что такое РХ4, но для этого у вас должно быть хоть раз упомянут Qground control…Отличия выше упомянутых плат тоже знаю, не в этом же суть. Речь шла про подход к настройке, и про мифы, которые вы сочинили.
Про стандартные шлейфы: за китайцами нужно все перепроверять, они могут в описании указать одно, а в готовом изделии вы увидите чуть другое. И прозванивать тоже обязательно.
И я вас не гноблю, это вы сами так воспринимаете совершенно справедливые вопросы и замечания и делаете свое мнение , “факт”, по вашему 😃 . Если оно вас как то обижает, ну извините.
На счет дневника, мыслей вслух и тд… Это технический форум. Ищите решение технических проблем - пожалуйста. Я просто против дилетантства, подкрепленного самоуверенностью, и при этом совершенно ошибочное собственное мнение выдается за якобы “факт”. И более того, кто мешает почитать? Информации море. И я вам ничего не доказывал, я просто привел аргументы.
И на счет ваших подключений… хз как и куда вы чего подключали. Судя по вашему заглавному посту, вы просто наугад подключили модуль под распиновку пиксхавка… Потом сделали совершенно революционное умозаключение, что в стандартном модуле поселилось два компаса… Логичнее было бы знать совершенно точно, какая распиновка в вашем минипиксе. выкопать схему, проверить на 100%. Тут чудес нет. Все что вы пытаетесь сделать, уже года два, как летает.
Что конкретно вы делаете, вы не пишите… кто такой РХ4? чего он там не видит? как вы это проверили? по каким симптомам? какая прошивка? и тд.
И вот теперь попробуйте снова прочитать свой пост, про то, как вы “Устал об этом писать, но Почитайте спецификацию к Pixhawk Mini - у него нет встроенного компаса.”… смешно, не правда ли?
…" Правда иногда, там люди пишут наспех, как Вы сейчас,"…
Может стоит сперва разобраться, а не сыпать якобы “фактами”, которые вы сами сочинили не понятно с чего…
Особенно улыбнуло, про второй компас в модуле BN880… наверно, сделан по спец заказу, именно для Вас… тоже факт наверно 😃
PS. про жпс модули… очень сомневаюсь, что модуль, который шел в комплекте был не рабочий. Скорее всего вы чего то не знали/не знаете. Модули перед подключением к ПК стоит проверять в уболкс центре. И там его можно правильно настроить, сменить параметры, перепрошить при необходимости. Советую не лезть в него с паяльником, а сперва проверить в проге.
Компас, как правило, рабочий. Максимум, что я встречал, это намагниченность. Но сам по себе не живой чип, не попадался. То что компас подключился, можно проконтролировать по его id в фул параметр лист. Если нет, то проверить правильность подключения sda и scl.
Посмотрите в фулл листе, там есть id компасов. Посмотрите до подключения и после подключения внешнего компаса. Должно быть одно значение, а после два.
Смысл в том, что отключение в прошивке внутреннего компаса актуально только для РХ4. (А РХ4 и ардупилот - разные прошивки, разных разработчиков. И в описании по вашей ссылке, компас вроде блокировали для РХ4.) Для ардупилота компас, должен работать. И в МП вы это сможете проверить. По компасу в MPU9250 летать невозможно, видимо по этому вам так и написали.
На Али с переводами вообще бред творится, имелось в виду, что в одном модуле два устройства.
- Устал об этом писать…
- …
P.S. Тружусь, ветки читаю. Правда иногда, там люди пишут наспех, как Вы сейчас, потому больше стараюсь ковырять сам и больше читать на сайтах производителей и разработчиков 😃
Олег, ерунду пишите! Мы наверно разные спецификации читаем по вашей ссылке 😃.
вот выдержка из описания:
Sensors:
Accel/Gyro/Mag: MPU9250
deprecated by the PX4 firmware
Accel/Gyro: ICM20608
Barometer: MS5611
Вроде же написано? Поясняю. В чипе MPU9250 есть аксель, гороскоп и КОМПАС. Компас хреновенький но есть. И в МП он виден, как второй компас.
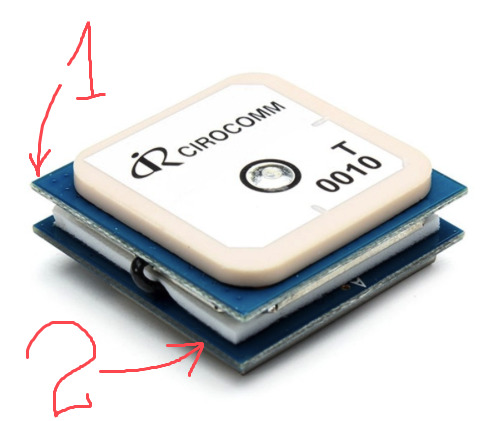
И еще… Вот фотография вашего BN880 - расковырял собственными руками. Где там два компаса? чип один - HMC5983.

Олег, кто вам сказал, или точнее, из каких соображений, вы решили, что в стандартном GPS BN880 поселилось два компаса?
Там один компас HMC5983. Если бы вы потрудились почитать соответствующие ветки, то знали бы о существовании компаса на плате ПК. И вот в варианте с внешним компасом, видно действительно 2. А какой вы будите использовать, сами должны назначить.
Ну да, в допуски укладывается. Но даже пики 15А многовато, на мой взгляд.
Я опасаюсь, что 2 банки в параллель мало будет для 1200 грамм. Инертность такой массы больше, чем в этом квадрике (590 гр). В случае быстрого разгона или когда на спуске нужно его подхватить перед землей, для батареи будет перегрузка. Несколько раз они наверно выдержат, но потом начнется быстрая деградация.
Хотя наверно возможно. Это получается ток висения около 8А , по 4А на банку… вполне реально.
Ну тягаться с Мавиком смысла нет, так же как и с остальными шедеврами DJI. Грамотные решения, которые, как мне кажется, потихоньку хоронят это хобби. Можно ведь купить готовое…
Практически все популярные формы коптеров я собирал - кавадрик, Y6, Hexa, окта… вот решил попробовать собрать что то с минимальным весом и более-менее долгим временем полета. Идеологию изложил в начале поста. В общем я не “гонюсь за слишком легким”, это просто эксперимент… Хотелось минимизировать энергию на перемещение камеры по воздуху.
Да, я понимаю, что можно перейти на 3S, но пока смысла в этом не вижу. Хотел поставить легкий подвес, но пока отложил эту затею.
Ваше творение видел. Хорошее время полета. Хотя, как по мне, наверно утомительно летать так долго. Есть у меня аналогичный квадрик (1900гр) на 13" пропах, тоже на 4S3P, но летает около 30 мин.
runcam split может и нормально будет. Там не совсем ясно с жесткостью шлейфа. Скорее всего, он для такой конструкции подвеса, слишком жесткий.
Александр, заранее простите за очень простой ответ/совет… почитайте, пожалуйста, страниц 50 темы по подбору комплектующих. Этот сетап (для гопро), там проходит лейтмотивом через всю тему. 99% новичков именно это и собирают.
Ну вроде это похоже на полеты в ЖПС… хорошо! А в конкретном проекте выбор я уже сделал, и очень доволен. Предсказуемо летает. Сегодня два аккума вылетал в сильный ветер. Коптер при сильном боковом ветре летит четко, ни куда не сносит. Пока летаю, набираю статистику… облЁтываю.
Александр, то есть, вы хотите сказать, что в iNAV, если коптер в режиме удержания позиции висит, и отклонить стик, например вперед, то коптер будет двигаться ровно вперед, компенсируя ветер… то есть его не будет сдувать? И лететь он будет с заданной скоростью стабильно, не зависимо от ветра? Или например, если вы хотите во время ветра сделать “восьмерку” с подъемом или опусканием по высоте… вы это сможете сделать при любом ветре? И это будет ровненькая “восьмерка”, а не попытки компенсировать боковой ветер? Я понятный вопрос сформулировал? (Просто, в прошлый раз, в ветке iNAV, именно Вы, Александр, говорили, что такого режима нет… пост 3454, 3461 и 3462)
По пунктам…
- Постоянно читаю ветку по iNAV, и меня сложилось впечатление, что проект очень сырой и являет собой 32-битную репродукцию Мультивия. И к сожалению, он не “приобрел” возможности летать в Жпс режиме, типа Наза или АПМ в Лоитере. Я имею ввиду не удержание позиции и возврат домой, а именно полет при любом ветре. А пикс, более развитая модификация 8-битного АПМа. И при любом ветре коптер летит, как по ниточке, его не сносит.
- Ноги на мотормаунтах не хочу, и считаю это плохим инженерным решением. При неудачной/быстрой посадке, коптер опирается на эти ноги, а “брюхо”, которое естественно тяжелое и имеет инерцию, проседает и таким образом пытается выломать лучи у основания.
- Да можно сделать штангу ЖПС длинее… а зачем? Чтобы поднять компас? пока это не потребовалось. В конфиге активировано 2 компаса, один внутренний и внешний. Плюс чудотворная система с самокалибрующимся компасом (это еще одна причина выбора пикса).
4.Да рассматривал Runcam split… хочу поставить маленький подвес. Если ставить Runcam split, то “кишка” от камеры к мозгам наверно имеет некоторую жесткость и будет мешать работе подвеса.
Если бы знать распиновку камеры от Мавика! Сам подвес стоит около 50-60 баксов… и камера еще столько же (без их электроники). Из чипа камеры выходит шлейф, и я подозреваю, что сигналы там такие же, как и в Runcam split.
Пока что камера, которая будет там стоять - sjcam M10+двухосевой подвес. - поделюсь
Слямзил Вашу идею …😒
Хорошо! Значит не зря я все это в дневник выложил 😃 .
Аркадий, до меня не сразу дошло… зачем же вы выдергиваете мои слова из контекста? Некрасиво однако!
Эта цитата из ветки по Ардукоптеру. И речь там шла о том, что человек делает соосник и думает, что это та же окта только меньше. И вот там я привожу пример из собственной практики. Был у меня соосник. И несмотря на то что сделано было добротно, и все отбалансировано, но вибрации мне так и не удалось победить. И в конечном итоге я его разобрал и собрал из этих же компонентов обычную плоскую окту. Вот и вся история… Сейчас летает замечательно с трехосевым подвесом.
Речь шла о нюансах соосного октокоптера с которыми я столкнулся. И окта эта не первая…
А вы прямо целую теорию вывели… хоть бы почитали о чем речь там была…
Аркадий, ну не цель проекта догнать и перегнать Мавик… Я абсолютно солидарен в том, что если нужно снимать видео, то Мавик оптимально и компактно. Потугами соревноваться с Dji я уже давно переболел. Бессмысленное это занятие. За эти годы столько денег и времени потрачено на это, что пять Инспаеров запросто можно было купить…
Идея проекта в том, что в хоббийных целях не нужно тянуть в небо килограммы. И все…
На сегодняшний день мне удалось получить компактный простой в изготовлении и ремонте квадрик с 30 минутным временем полета. Замечательно!
Теперь хочу, как и было запланировано, поставить пишущую камеру с более-менее вминяемой картинкой. Все советы и рекомендации, которые вы говорите, абсолютно правильные и логичные. Я сам все это понимал и до того, как начал собирать квадрик. Есть мысли, идеи, как это реализовать. Сделаю, покажу.
… “Я делал такую конструкцию, но так и не добился хорошей картинки на камере (сони некс 5 + 3-осевой подвес на 32бит Алексмос)”
Знакомая цитата? 😃 …
Ну не знаю, вот пару лет назад летал… не супер, но как по мне, то сносно. (и там 8 битный контроллер стоял в то время)
Спасибо. Я все учту, все понял…
Нет большого смысла делать этот коптер съемочным… Это из личного опыта 😦
Спасибо, учту. Или вы предлагаете сразу похоронить…? Наверно я все таки попробую…
Конкретно в этой конструкции подвес будет снизу. Подвес будет 2-х осевой. Если крепление снизу, то разница между 2х и 3-х будет только в массе мотора ЯВ. Если рассматривать разные варианты, то при переднем креплении подвеса, разница в массе будет больше.
Есть очень не стандартные идеи по изготовлению подвеса, поэтому пока в процессе создания…
Решает с точки зрения конструктива крепления подвеса, со всеми вытекающими (в том числе и дополнительными граммами).
Не считая выброразвязки: Двух-осевой подвес крепиться на нос коптера за мотор ролла без всяких лишних (граммов). При этом коптер компактный и хорошо складывается.
У трех-осевого все несколько сложнее:
- Либо крепить снизу + ноги (а это вес). И страдает компактность в сложенном состоянии. Либо надо делать съемный подвес.
- Либо менять конструкцию рамы с выносом крепежа подвеса выше (что тоже дополнительный вес). Аля, как у мавика, только с увеличением всего под размеры GoPro.
- Либо переходить вот на такую схему, что далеко не типовое решение для расположения моторов подвеса.
Спасибо за ликбез… Все это я уже проходил. В 2013 году летал на гексе с 2-х осевым под сони некс, 2014 году с 3-х осевым под Кенон (на окте), потом переделал 2-х осевой в 3-х осевой… и тд. Это не считая нескольких трехосевых для гопро… и конструкций - похожую на Вашу с подвесом на носу… Сейчас есть окта 1100мм, квадрики с разными мозгами и с разными рамами. Все это летает… поэтому некоторый опыт имеется.
Этот проект, это стремление сделать все максимально легким. Окта это здорово, это мощно, вот только аккумуляторы дорогие. Остальные (мои) квадрики, по сравнению с этим мелколетом смысла не имеют в принципе. Все тоже самое, только под 2 кило веса… зачем?
2204 -24 грамма, камера sjcam m10 - 48грамм (без аккумулятора)
В этом случае да. Но я писал про трехосевой. Т.к. двухосевой, это недоподвес.
Разница между 2х-севым и 3х-осевым, 24 грамма (в моей интерпретации)… я не думаю, что это что то радикально решает. А в принципе, в описании этого проекта я говорил про 2-х осевой подвес.
Нашел на Ebay отдельно камеру и отдельно сам подвес без электроники от Мавика. Если бы знать, какой сигнал выходит с чипа камеры, можно было бы заморочиться…
Как думаете, вот с такими моторами как он себя вести будет?
Можно посчитать в калькуляторе… но навскидку, для 2S питания будет малая тяга с таким (1200) кв. Кв желательно около 2000. Ну это если вы прикидываете взлетный вес около 500гр. Если будет меньше, то почему бы и нет. Я считал моторики 1806 кв 1900 + 7"-8" проп, очень обнадеживающе выходит при весе коптера 500 гр.
А я смотрю на запчасти от симы,…- минут 20 оно будет летать.
Изначально я хотел сделать именно в корпусе симы 5св, даже сам корпус купил. И вроде оно очень здорово должно получиться… но когда приехали моторики 2206, мне стало жалко калечить корпус. В результате расчертил и напечатал свое. Но корпус остался… вот думаю 1306 моторики туда засунуть… Но с питанием там не все просто будет.
На подвес можно эти моторки - myrcmart.com/rcx-h1806-80t-gimbal-brushless-motor-…
Вопрос по плате управления - они все имеют конский размер и вес
Да хорошие моторики. Я находил 1806 кв 450 с пустотелым валом, и вроде они ЕМАКС. Но сейчас у меня есть 2204, поколдую с ними, если покажутся тяжелыми, буду брать типа таких. Контроллер будет Шторм32 мини , однозначно. Просто он самый миниатюрный.
Квадрик не будет перегружен, запас по тяге есть. Подвес планируется двухосевой.
Соревноваться с Мавиком и остальными шедеврами Dji нет смысла. Там технологии в грамотных руках конструкторов с адекватным результатом. Один только Spark чего стоит… на “коленке” такое недостижимо. Мини камеры, Лайтбридж, и тд. В хоббийных целях, это купить нет возможности, да оно и не нужно. Проще купить dji (вот только ремонт дорогой).
Тот аппарат на котором Вы летали вчера по типу фантома - это ваша история. хз почему его разворачивало… нормально настроенный коптер разворачиваться не должен.
Да, понятное дело, поставлю подвес дополню пост… Но даже в таком виде, это уже хорошо.
С подвесом он летать уже не будет.
Чего это? Откуда такая уверенность? По моим расчетам будет.
Вы же пишете: “по 5А с каждой банки”. Зачем больше?
Ну так 5А это в висении, если не агрессивный пролет… а к примеру, если вы летите со скоростью 50км/ч, и вам нужно резко затормозить, то ток может вырасти раза в 2 минимум. Или при быстром спуске, около земли нужно подхватить аппарат, там тоже токи выше будут. Поэтому запас по токоотдаче лучше иметь.
Пропеллеры Mavic встают без доработки?
Отверстие нужно увеличить до 5мм (в оригинале 3мм) и крепежные выступы срезать.
Идея подключения аккумулятора понравилась! С такими токами, наверно, лучше использовать Sanyo GA - у них ёмкость больше.
Pixracer закреплён на раме жёстко?
Вроде у LG самая большая возможная токоотдача. У Sanyo GA максимум 10А. Пикс стоит без корпуса на виброразвязке. Корпус тяжелый оказался… а сама плата меньше 10гр.
Можно чертежи и схемотехнику в общий доступ? Как он летает в ветер? Вообще это шедевр! Спасибо!
В ветер летает просто супер. Очень четко, как по рельсам. Схемотехника вроде описана. Каждый компонент со ссылкой.
…И мне кажется элементы напечатанные на принтере могут нагонять лишний вес.
Ничего легче я пока не придумал. Сама тушка весит 45 гр+5гр перегородка с контактами, мотормаунты по 4гр, крышка 15 гр. Самые “тяжелые” элементы, оказались карбоновые трубки по 6 гр.
Вы ток в режиме висения пробовали мерять?
…
Теоретически, если 6А/ч аккум разряжается за пол часа, соответственно ток около 12А. Скорее всего меньше, так как все 6А я из него не “извлекаю”. Около 10А, я так думаю. Это примерно по 5А с каждой банки - нормально вроде…
…GND ардуино к минусу ESC, и далее по порядку D3 ардуино к левому пяточку ESC … D6 к правому пяточку? …
Нет, вы не поняли… все программируется по сигнальному проводу. Выводы D3-D6 подключаются к четырем регуляторам одновременно, в сюите будут их номера 1-4. Таким образом можно залить одинаковые параметры сразу во все.
получается, что от 6-7-8В маловато будет?
Алексей, на регуляторах заявлено питание от 2S, то есть это от 6-8,4В примерно. На сколько я понимаю, проц на регуле не глюканет при падении напряжения до 5-6В. Питание у него 3,3В. Как вы считаете, на сколько безопасно ставить эти регули на мини-коптер с питанием 2S?
Так вот я с проводами, торчащими, и сражался. Суть не в том, что напечатал… 3д принтеров уже много, печатают все что угодно. Если посмотреть в разных ветках фотографии самодельных коптеров, что у них общего? 90% конструкций собраны очень неаккуратно, модули открыты и практически во всех с проводами хаос. В моем принте, я попытался под каждый блок сделать свое место, спрятать все провода. В этом суть…
Спасибо. Я читал, что так делают, но еще не пробовал…
Сетап простой и доисторический… контроллер Мультивий про (красный с ХК), регуляторы Турниджи плюш, прошитые на БлХели, Моторы переделанные 3536, кв около 600. Моторы перемотал и срезал валы, поставил проп адаптеры. Пропеллеры 13". Аккумулятор 5800 4s. Полетное время около 20 мин. Прошивка Mahowii 2.4. Вес без аккумулятора 970 гр. Задач особо ни каких нет, хотелось сделать “леталку”, которую можно собирать , как конструктор. Интересно посмотреть, как ведет себя коптер напечатанный на принтере, с точки зрения прочности и надежности.
Ну да… многовато “разношерстных” деталей. Это можно все поместить в общий корпус. Ну и открытая электроника не есть гуд…
…и чего я ношусь с этим колпаком заводским для жпс, спрашивается? Снять его и закрепить так же надо наверное…
Скорее всего дело не в ЖПС, а в компасе, который там на плате. И для компаса важно “поймать”, как можно меньше наводок от силовых проводов. Именно в этом смысл отдельной стойки под ЖПС. Если вы сделаете правильную разводку по питанию и уровень наводок на компас не будет влиять, тогда можно отказаться от стойки.
Жесткость достаточная. Все конечно зависит от нагрузок. Для коптера весом в 1-1,5кг - вполне. Ну и в принципе, конструкция объемная, что улучшает жесткость.
Спасибо! Тоже начну экспериментировать. А моторы, вроде бы, уже не rctimer?
В моей конструкции с rctimerа… (если ко мне вопрос) Правда на сегодняшний день этот подвес модифицирован в 3-х осевой, добавлен 32-битный контроллер. И для 3-х осевого, у такой конструкции не достаточно жесткости. Нужно делать конструкцию “закрытого” типа, как у Алексея. Консольная “играет” ее сложно нормально настроить.