Activity


Пока писал, образовалось много букв, так что, вкратце, речь пойдет о следующем:
— Что нужно сделать сразу после покупки Walkera 350 pro?
— Как удобно управлять автомиссиями?
— Как поставить телеметрийный радиомодем?
— Как перейти на управление по FrSky и зачем это нужно?
— Как подключить OSD и видеолинк?
— Что еще можно сделать и почему?
Со временем, картинки потерялись из поста. Кому будет лениво дальше читать, то суть-схема доработки и картинки тут yadi.sk/d/VaKlhJ7Z3JMz6w
Итак, к вам приехал комплект Walkera 350 Pro в стандартной комплектации с подвесом G-2D и пультом Devo F7. В принципе, это довольно неплохой и симпатичный коптер 350-го класса с некоторым количеством детских болезней которые можно легко побороть. Уже после нескольких полетов становится понятно, что запускать все это хозяйство в стоковой комплектации становится довольно скучно. Да, это летает, но недалеко и не всегда надежно. Судя по информации пилотов с ветки rcopen.com/forum/f135/topic361315 у кого не летает вовсе, кто-то запускал автомиссии в облака, а кто-то покупает уже четвертый по причине улета предыдущих и прочее и прочее… Лично мне пришлось здорово повозиться с настройками компаса и тонкостями его калибровки на контроллере devo-m которые подробно описал тут. Выкуривать всю ветку по прошке уже после 100-ой страницы довольно напряжно, поэтому я решил собрать наиболее важные, по моему мнению, доработки и ссылки в этом посте.
Теперь по порядку:
-
Чтобы как минимум летало и не падало, весьма желательно ознакомиться с материалом в ВИКИ по Walkera 350 Pro и Devo-M Ardupilot. Также рекомендуется сделать полезные настройки на пульте Devo F7. Компас калибровать только на улице. От калибровки сведением стиков я давно отказался и делаю это исключительно в МП при установленном параметре COMPASS_LEARN=1. Пока не установлен модем, калибровать компас придется ловкостью рук начиная с 18:10 на длинном USB шнурке. С подвесом G-2D отдельная песня — я так и не смог его настроить и, в итоге, продал на запчасти.
-
Коптер надо разобрать, проверить качество пайки и обработать абсолютно всю электронику, включая приемник, лаком типа Plastic Cramolin в несколько слоев у кого как хватит терпения. Контроллер devo-m снять, заклеить на нем скотчем дырочки барометра и обработать лаком тоже. После высыхания скотч снять. Лак предохранит электронику от повышенной влажности в атмосфере.

-
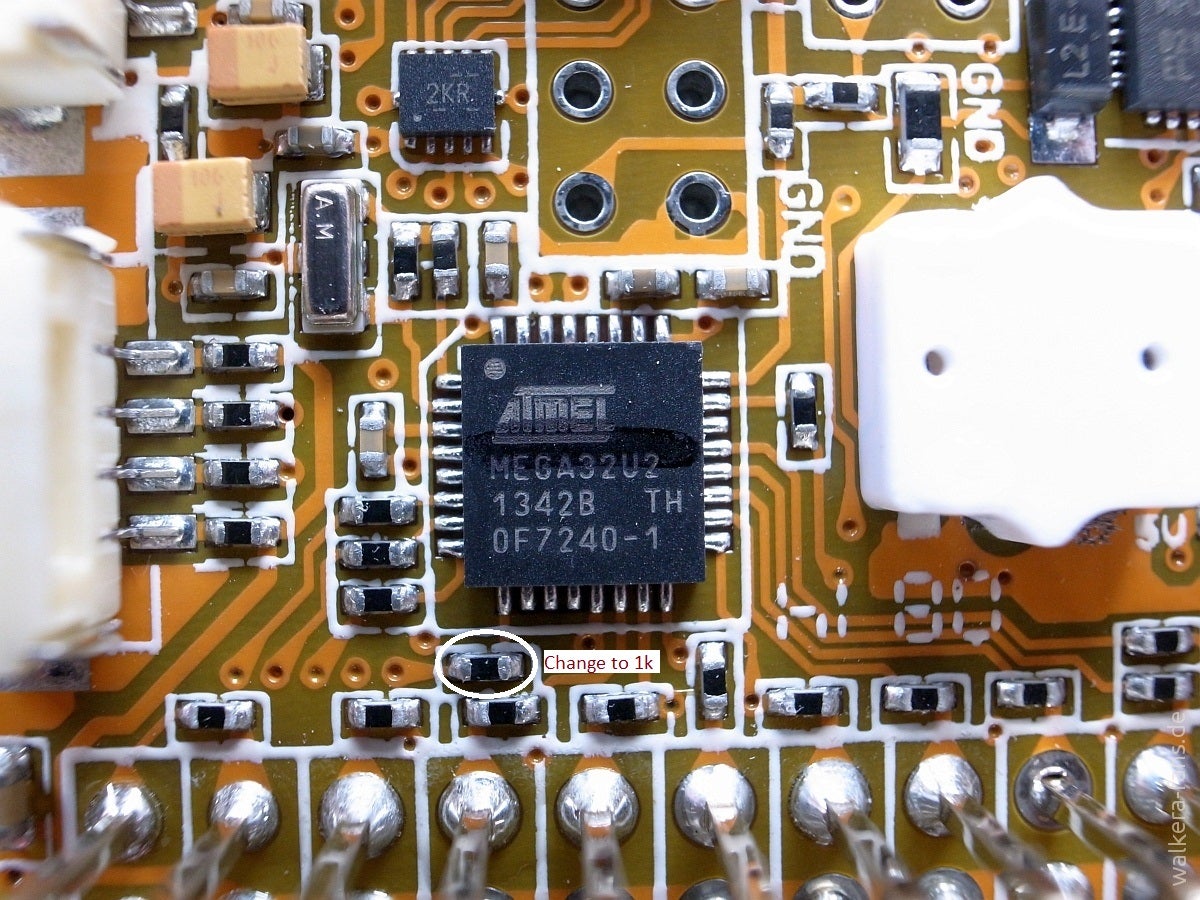
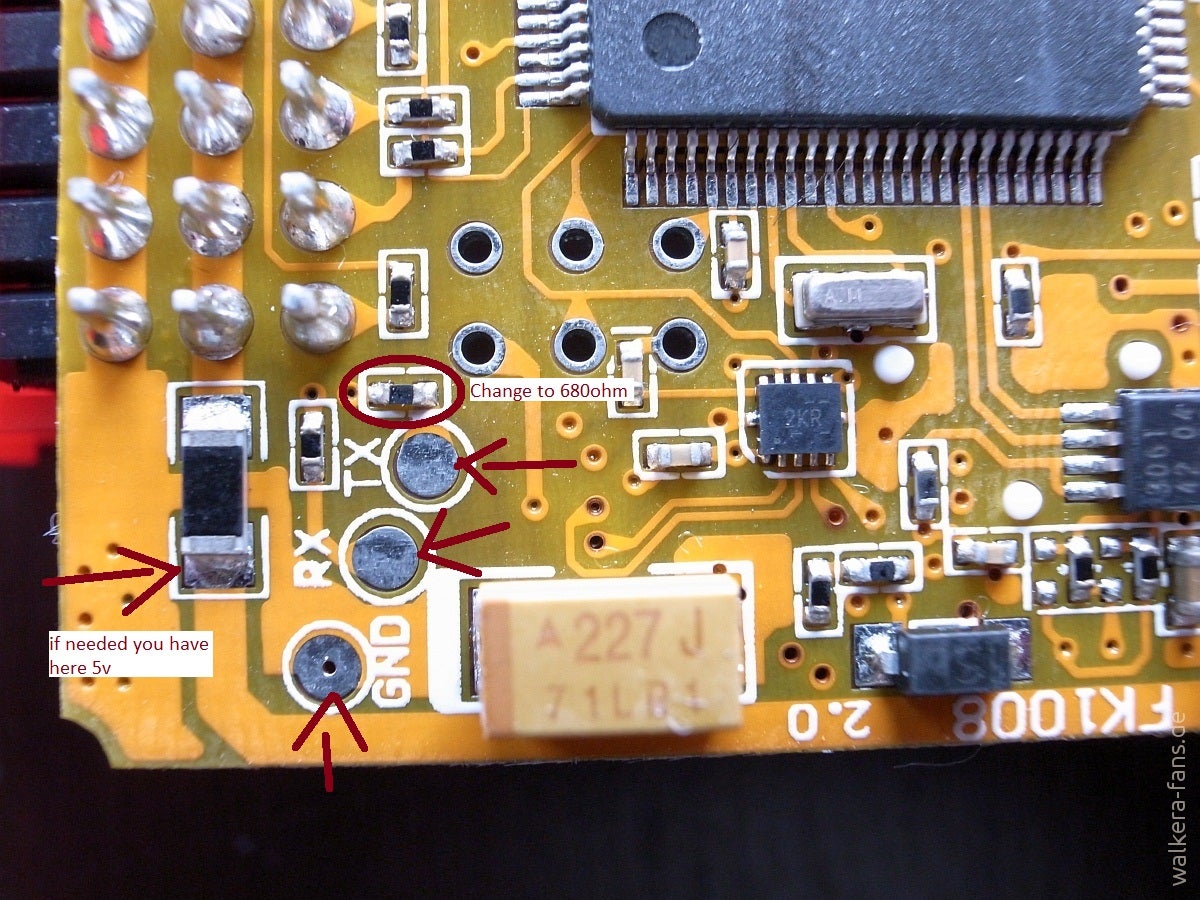
Как летать автомиссии довольно подробно описано в дневнике у NARAJANA. Миссии можно планировать и загружать с помощью шнурочка по USB, но, чтобы внести изменения, надо коптер сажать и перезагружать ее заново через тот же шнурок. Это весьма неудобно, также как и таскать ноут с собой в полет, поэтому лучше подключить 3DR модем и управлять им с планшета через OTG разъем. Я поставил вот такой с Банга в коробочках на 915. Есть инфа, что на эту частоту они запрещены, но если в дальнейшем летать по LRS 433, то модем на 433 точно не подойдет. Тут уж личное дело каждого. Чтобы модем заработал, необходимо обязательно поменять на контроллере devo-m два резистора 680 и 1к 0402 размера. Их можно поискать или на старой материнке или в не рабочем мобильнике. Процесс замены таких мелких резисторов весьма нетривиален. Если у вас нет опыта пайки лучше обратитесь к знакомому электронщику с микроскопом или в специализированную мастерскую по ремонту мобильников. Поверьте, выйдет дешевле, так как новый контроллер Devo-M стоит от 120уе плюс доставка, в зависимости от аппетитов продавца.
Некоторые телефоны и планшеты могут не работать с 3dr модемами или из-за отсутствия поддержки OTG (USB-host) или из-за отсутствия в системе драйверов USB-COM FTDI (Архив скачать, разархивировать в папку на устройстве и запустить apk на устройстве). Список телефонов и планшетов, с которыми модемы работают/не работают.
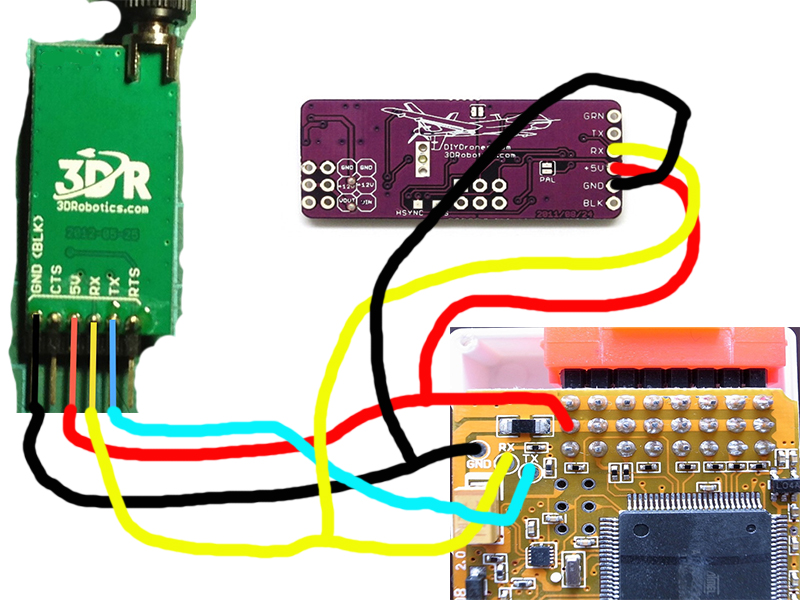
По непонятной причине контакты RX и TX на контроллере называются не по логике подключения RX to TX. На это надо буквально забить и подключать как на картинке. Кстати, модем приезжает с проводами точно в цвет означенного подключения.
Модем лучше разместить сбоку либо перепаяв родной разъем на угловой SMA, либо через угловой переходник.
При вертикально ориентированных антеннах на земле и на борту он обеспечивает связь на расстоянии от 600 до 800 метров. Теперь можно с помощью программы Droid Planner управлять автомиссиями через закрепленный на аппаруре планшет.
Как управлять автомиссиями с планшета очень хорошо показано на видео от Юлиана. Кроме того, с помощью модема значительно удобнее калибровать компас, работать с программой Mission Planner и находить улетевший аппарат. Необходимо помнить, что RSSI на планшете отображает не качество канала управления, а качество связи между модемами.
- В принципе, для FPV полетов подвес вообще не нужен. Родная камера iLook с передатчиком обеспечит видеолинк на расстоянии до 300-500 метров и быстро надоест. Чтобы нормально летать по камере, необходимо иметь информацию RSSI о качестве сигнала между приемником и передатчиком в аппаратуре. С родного приемника RX703 RSSI взять неоткуда, поэтому, желательно полностью переделать ВЧ тракт 2.4, в аппаратуру Devo F7 поставить DHT модуль от FrSky, а на борт поставить приемник D8R-XP. Кроме того, штатный приемник RX703 имеет особенность не восстанавливать управление после потери связи до полного RTL средствами контроллера, да и протокол devo не торт. В общем, переход на FrSky во всех смыслах рекомендуется.

Приемник D8R-XP замечательно встает на штатное место если снизу немного подкусить ребра жесткости внутри рамы коптера. Имеется довольно толковая инструкция с rcgroups по подключению D8R-XP в Walkera 350 Pro и оригинальная документация FrSky к приемнику D8R-XP. В приемнике необходимо замкнуть 3 и 4 сигнальные пины, после чего он одним проводом подключается по CPPM в разъем DATABUS контроллера Devo-M вместо родного RX703.
При большом желании можно подключить на A2 приемника voltage sensor на резисторах для контроля бортового напряжения по телеметрии FrSky, но я этого не делал, поскольку напряжение прекрасно видно либо через планшет, либо через OSD по протоколу MavLink. Если делитель подключен, то напряжение борта можно контролировать через отдельный экранчик FrSky, который подключается в разъем модуля DHT. На нем же будет отображаться важный параметр RSSI качества канала управления. Без экранчика модуль DHT будет просто пищать зуммером при малом RSSI.
- Теперь можно приступить к установке OSD. Подойдет любая MinimOSD. На ней надо запаять две перемычки и подавать питание только 5V. OSD будет работать и без перепаянных резисторов на контроллере.

Далее прошиваем OSD прошивкой MinimOSDExtra_Copter_Prerelease_2.4_r789. Заливаем шрифты из файла .mcm которые понравятся. Делаем настройки для OSD в Mission Planner. Подключаем к контроллеру только RX и настраиваем экран вывода параметров. Подробнее про прошивку и настройку OSD также можно посмотреть на видео у Юлиана. Информация о напряжении питания борта и RSSI будет передаваться с контроллера в OSD по протоколу MavLink, но для вывода RSSI на экран OSD необходимо завести PWM RSSI приемника через RC фильтр на 95 ногу контроллера Devo-M и включить RSSI в МП: RSSI_PIN=2, RSSI_RANGE=3,3. По ходу экспериментов и ошибочных подключений я убил этот порт на контроллере и пришлось заводить RSSI на 97 ногу и переключать параметр на RSSI_PIN=0. Так что осторожно! Кстати, пайка на ногу контроллера также требует весьма продвинутых скилов в этом направлении, как и замена резисторов для модема. Можно подпаяться на ногу маленьким проводочком с волос и от него уже делать вывод. Место пайки желательно залить жидкой изолентой типа Performix Liquid Tape или Plastic 71.

 В настройках OSD у меня стоит MAX RSSI 255 и показывает уровень 94-95%. Можно поставить 245, тогда на экране будет 99-100%. Минимальный RSSI = 50. Калибровкой через Enable RAW не пользовался. На сам экран параметров выводят кому что удобно: таймер, спутники, горизонт, напряжение борта, rssi и полетные режимы. Переключение режимов OSD на экране у меня выведено на Channel7=Переключатель GEAR. Также оказалось удобно не делать выноску на проводах из контроллера, а использовать штатные пины на неиспользуемых контактах моторов 6,7 и 8. Жалеть особо нечего, так как вероятность установки этого контроллера на восьмимоторный коптер равна нулю. Надо подрезать контактные площадки на плате, завести на не обозначенный M6 RX, на M7 TX и на M8 RSSI с ножки контроллера. Далее эти контакты подписать на корпусе и подключаться к ним обычными модельными джамперами с сигналом, 5V и GND.
В настройках OSD у меня стоит MAX RSSI 255 и показывает уровень 94-95%. Можно поставить 245, тогда на экране будет 99-100%. Минимальный RSSI = 50. Калибровкой через Enable RAW не пользовался. На сам экран параметров выводят кому что удобно: таймер, спутники, горизонт, напряжение борта, rssi и полетные режимы. Переключение режимов OSD на экране у меня выведено на Channel7=Переключатель GEAR. Также оказалось удобно не делать выноску на проводах из контроллера, а использовать штатные пины на неиспользуемых контактах моторов 6,7 и 8. Жалеть особо нечего, так как вероятность установки этого контроллера на восьмимоторный коптер равна нулю. Надо подрезать контактные площадки на плате, завести на не обозначенный M6 RX, на M7 TX и на M8 RSSI с ножки контроллера. Далее эти контакты подписать на корпусе и подключаться к ним обычными модельными джамперами с сигналом, 5V и GND.

- Собственно все. После этих нехитрых доработок Walkera 350 pro вполне может использоваться для автомиссий и дальних FPV полетов. Я сознательно не рассматривал возможность сноса контроллера devo-m и установки вместо оного, например miniAPM. Просится конечно. Даже из-за того, что в devo-m нет полетных логов и отсутствует программный файлсев, но тогда это будет уже коптер с совсем другим сердцем. Оставлю его как есть — в конце концов меньше телодвижений с паяльником и не хочется расставаться с родными светодиодами арминга и контроля GPS. В качестве видеопередатчика можно использовать любой совместимый по частоте с Devo F7 по всему второму каналу FR2 5733,5752,5771,5790,5809,5828,5847,5866, например всем известный noname TS832 (ни разу не Боскам — в интернетах все врут) или оригинальный Boscam на 600 mw. Кстати, у последнего разъем один в один как у контроллера Devo-M. Даташит.
Например, 5752 (22 канал) на TS832 соответствует Channel 7/8 на F7. В качестве FPV камеры рекомендуется DC5V~22V Plastic Case mini 600tvl Sony Super HAD CCD Super FPV Camera 2.8mm Lens. Остается только определиться с очками или шлемом, но это уже совсем другая история…
p.s. Один важный момент. Необходимо организовать питание видеолинка и камеры через отдельный Step Down с напряжением 8V (так помех меньше) и питание OSD также подключить отдельно. В обоих случаях подойдет вот такой с Банга. OSD будет работать и от штатного питания по схеме выше, но с учетом его капризности и частоты выгорания лучше обезопасить остальную электронику. Пока шаманил с подключениями, ошибся и столкнулся с волшебным синим дымом. В результате минус OSD, минус мелкий Фатшарк 600 на 5V, минус видеопередатчик и модем, минус порт на контроллере и потеря времени. Так что запрягайте сразу правильно и внимательно подключайте разъемы JST — они втыкаются легко наоборот.
upd: Еще можно поменять родной GPS модуль на модуль Алексея Козина GPS/GLONASS на МediaTek MT3333. Ловит спутники даже в квартире, но на “болтанку в лойтере” может не повлиять. У меня и с родным летает отлично.
upd2: На всякий случай ссылка на полезный архив с прошивкой 1.0 при откате со старших версий:
- default_X350_Pro1.0.bin.param (файл параметров, с которыми летает идеально)
- X350_Pro1.0.bin (прошивка Walkera 350 Pro 1.0)
- upgrade quide.pdf (инструкция по прошивке)
- SerialAngel.exe (программа для прошивки)
- Original Config X350_Pro1.0.bin (для исправления номера прошивки при откате со старших версий и после setup erase в терминале)
Если после манипуляций с прошивками и команды setup erase перестали сохраняться параметры контроллера в Mission Planner, то файл Original Config X350_Pro1.0.bin необходимо записать в контроллер через закладу Config программы SerialAngel.exe. И все опять будет сохраняться.
upd3: Walkera QR-X350Pro-недокументированные возможности и апгрейды. Группа для обсуждения без флуда. Причина создания группы — не редактируемая шапка профильной темы на форуме, в которой уже после 100-й страницы что-либо найти трудно, а после 200-й вообще не реально.
upd4: Для энтузиастов имеется подробный фототчет по прошивке контроллера devo-m в стандартный APM. Необходимо, вначале, заменить стандартный бутлоадер контроллера через SPI интерфейс при помощи программатора USBASP и потом залить в него новую прошивку. Однако необходимо помнить, что откат назад будет невозможен. Ссылка на архив с инструкцией совместного творчества Biozz и bifurkas yadi.sk/d/P7qi_Eb3gLW83. Здравствуй ардукоптер!

upd5: Таблица совместимости частот передатчиков и приемника видео devo F7 от WhiteWind.
upd6: Заливка прошивки Ардукоптера в devo-m без смены загрузчика при помощи Walkera decode.exe. Подробнее тут. Соответственно сохраняется возможность вернуть родную прошивку Валкеры. Готовая прошивка на сайте Алексея Козина AC_32_wogimbal_v2_DEVOM_WALKERA_x350_Pro.bin.rar !!!Внимание прошивка работает с родным загрузчиком Devo-M и не подходит для контроллера APM!!! Приобретаем все плюшки и преимущества APM, например, логи, но теряем родные светодиоды арминга и GPS.
upd:7 Что еще в этот корпус можно поставить? Да хоть Naza-M Lite.
Крупные фото внутренностей без бустера.
Что бы не говорили про игрушечность аппаратуры Devo F7, но мне она нравится. Прежде всего эргономикой, встроенным телевизором, резиновыми накладочками по бокам, простым и удобным интерфейсом прошивки. Есть удобный сигнал по движению стика газа и по центру крутилки. Можно легко запрограммировать режимы для квадрика на боковые переключатели и таймер по стику газа. Даже вибра есть и сигнализация по просаду батарейки. Эта аппа идет в комплектации на Walkera 350 Pro, так что обладателей найдется довольно много.
Из главных недостатков: нет никакой сигнализации о потере связи с моделью, работа только с приемниками серии devo, абсолютно неудачное расположение родной антенны с диполем которая смотрит прямо на модель, а должна смотреть параллельно ей. Реальная дальность связи составляет около 800 метров и меньше. Ну и батарейка подкачала безусловно. В общем, считаю ее достойной апгрейда…
Будем бороться с недостатками чтобы получить вот такого красавца с проверенным протоколом FrSky ACCST, звуковой индикацией потери связи с моделью и дальностью около 2 км влегкую (наверное и дальше, но пока не было возможности проверить).

PPM в этой аппаратуре извлекается из тренерского разьема. Чтобы не пользоваться штекером, в плате разъема надо замкнуть два контакта и вывести сигнал PPM на модуль DHT. Если PPM есть, на экране при включении будет надпись “PC-Link”. В корпусе аккуратно сверлим отверстия для платки со светодиодом и кнопкой из модуля DHT (основное время по доработке занимает именно высверливание оных отверстий подгонкой под модуль сверлами разного диаметра). Эту платку крепим термоклеем или саморезом, если ножку возле отверстий не срезать. Переключатель режимов модуля с разъемом можно не ставить вообще. Я собираюсь использовать только телеметрийные приемники фриски и обновлять прошивку тоже ни к чему. Возле батарейного отсека ставим модельный выключатель, чтобы щупался пальцем: включен - вниз, выключен - вверх.



Родной ВЧ модуль вынимаем и складываем в ЗИП. В отверстии антенны ножку срезаем под корень и делаем из пластмасски вставочку под антенну в виде сильно пузатой буквы Н. У меня получилось ее сделать с третьего раза подгонкой. Корпус будет прекрасно держаться на четырех винтах без огуречного набалдашника. Внутри корпуса ставим UBEC с выходным напряжением 5V для бустера. На юбек подаем через диод напряжение с аккумулятора через выключатель. Диод нужен для подключения внешнего напряжения через разъем - когда подается внешнее питание, то диод закрывается и питание с батарейки отключается. На нем может упасть с пол-вольта, но с учетом родной батарейки до 7,5V это не страшно. Все убираем внутрь корпуса и получаем полный профит — слева на морде лица светодиод питания 4(5)V. Справа зелено-красный мигающий индикатор модуля DHT с кнопкой.
Не забываем, что DHT модуль надо включать отдельным выключателем (если поставили), а при внешнем питании он будет включен постоянно. Если батарейка подсела, то быстренько включаем внешнее, например, с резервного аккума и уходим на посадку для дозаправки).



Какие плюсы?
- Можно подключить к аппе телеметрийные приемники фриски, например d8r-xp и получить на борту rssi для OSD и контроль напряжения 12v через телеметрию.
- При превышении дальности модуль DHT начинает пищать (и с бустером тоже). Пока не разобрался при каком RSSI это происходит, но вроде ниже 45. Так что есть звуковой контроль за улетом.
- Аппаратура приобретает взрослый вид. Не то, что огуречик был прилепленный, а теперь с таким солидным штыречком для надувания щек 😃
- При очень большом желании еще можно подключить к разъему модуля дисплей телеметрии FrSky, но я получаю телеметрию через модем на планшете.
Решения
- На штатном борту walkera 350 Pro стоит приемник Devo RX 703. При пропадании связи у него происходит замыкание пятого канала до максимума, чтобы сделать RTL пока не сядет. Управление при этом не восстанавливается до полной посадки и ресета. Работает, но напрягает. Поэтому решено было перейти на d8r-xp, тем более, что он подключается в контроллер Devo-M одним проводчиком в Data.Bus по CPPM.
- На выходе модуля DHT 60mw, а на входе бустера по спецификации требуется не более 20mw. Бустер от этого слегка греется, хотя с родным модулем devo был почти холодным. Нужно или поставить аттенюатор, но я просто понизил напряжение питания бустера до 4V.
Проверка связи
Повесил я приемники d8r-xp и x8r на окошко. d8r-xp сбиндил с доработанной аппа oй F7 на бустере. С x8r сбиндил свежеприехавший Таранис. Ну и вечерком пошел гулять на улицу с аппами в сумке. После полутора километров в городе между домов, мостов и виадуков Таранис сказал, что связи нет. Доработанная аппа F7 не пискнула ни разу. Дальше просто лениво было и не пошел… Как представится возможность оценить в полете - доложу… Предполагаю, что покажет пару километров и далее влегкую.
Не удалось побороть
- Белые цифры индикации каналов и вся строчка сверху в режиме телевизора на экране. Если в альтернативных прошивках сделают такую возможность - будет замечательно.
- Найти аккумулятор 3S влезающий в отсек. Родной 800mA, после мода с бустером, высаживается, приблизительно, за пару часов. Нашелcя только 2S 1200 на Банге. Или надо будет сделать сборку из LG Chem ICR18650E1 3000мАч 3,7В. upd: Вот такой YKS 11.1V 850mah подходит по размеру.
- К сожалению эта аппа не имеет альтернативных прошивок. Модуль DHT может поддерживать 8 и более каналов. Надо только их выдать ему по PPM. Думаю, что софтом это решить вполне реально ввиду распространенности аппаратуры…
- Где бы найти подходящие стики на подшипниках да с резисторами Murata?
Линки
- FrSky DHT - DIY Telemetry Module (23 енота. Можно вдвое дешевле на ХК, но я там пока зарекся брать).
- DJI Phantom 2.4GHz 2 Watt Signal Booster (47 енотов. Тоже можно поискать подешевле).
- UBEC на 2596 на ебеях покупается корзинкам. Можно поставить и любой другой на 5V с ферритовым колечком на выходе (1 полуенот).
- Вики по телеметрии FrSky: приемники, датчики, характеристики, в общем полный описательный фарш.
- Можно еще вынести антенну 5.8 наружу и поставить на нее клевер для увеличения дальности видеолинка.
Благодарности
NARAJANA за инфу по CPPM на devo-m. samsung за инфу по PPM на devo-m. schs за инфу по согласованию мощности на бустере.
Резюме
Бустер вообще можно не ставить - это я перебрал, хотя выглядит круто). Тогда и юбек тоже можно не ставить. В этом случае вообще все сильно упрощается, подается с батарейки на DHT питание, заводится PPM с тренерского разъема и все. Диод между выключателем модуля DHT и разъемом внешнего питания нужен обязательно, чтобы не подорвать батарейку: он ставится анодом к батарейке и катодом на питание модуля. При подаче питания с разъема диод закрывается и отключает батарейку. Про полвольта падения напряжения на диоде можно не думать, так как при 6,7V аппа и так отключается, а для модуля DHT нужно 6V минимум.
Важное дополнение
Все никак было не подлетнуть на переделанной аппе. Связь-то я проверил. Газ работал, коптер армился и все каналы в МП шевелились, а вот ALE и ELE при подключении по CPPM оказываются перепутаны местами. На это не обратил внимания и ушел на Таранис. В общем, недоработочка. Сорри. Но ничего страшного. К сожалению в аппе нельзя переназначить каналы по стикам — это минус прошивки. Поэтому вариант первый, можно подключиться к контроллеру не по CPPM, а отдельно в каждый канал с перемычкой на контроллере в JUMP PORT или вариант второй, надо поменять местами в аппе провода на резисторах правого стика ALE/ELE, триммерах и сделать программный реверс там где это необходимо. Кое-где надо будет проводочки удлинить. Тогда все будет работать как надо. Спасибо Arkasha18.
Смастерил вот такой Tilt под Mobius.




Комплектация:
- Пластмассовые салазки для подвеса Walkera 350 pro. Ставятся на штатное крепление.
- Дампинги 6,5мм
- Пантилт с Паркфлаера на микроподшипниках за 280р. - Микросерва и винтики DIN 965 M2
Вес 74 грамма вместе с камерой. Опускается вниз почти на 80 градусов. И в верхнем положении градусов на 10 можно подкорректировать. Дергается, конечно, при движении сервы на резиночках, но она мне в качестве курсовой на квадрик нужна. Наверное можно еще на самолет поставить. Питание сервы надо подключать на борт, конечно же, через BEC.
Делать тилт на выносном “глазу” смысла не было. Серва таких мобиусов может тягать еще штук пять. Там же подшипники стоят и рычаг как-никак. И конструктивно проще. Коса порвется не ровен час. Задача вертикаль подкорректировать в полете минимальными средствами и весом. Если не ставить салазки под валкеру, то стоимость тилта 600 ре со всем фаршем. Но погони за стоимостью не было ни разу. Просто получилось и дешево и сердито.
Это первое, что я поставил на коптер Walkera QR X350 PRO. Чтобы не растекаться мысью по древу сразу опишу преимущества, недостатки и особенности. Возможно это нехитрое устройство поможет кому-нибудь найти своего улетенца. Лично я очень надеюсь никогда им не воспользоваться по прямому назначению.

Преимущества:
- Малые габариты и вес всего 27 грамм.
- На входящий звонок играет громко музыка, так что можно использовать как автономную пищалку. И микрофон есть с тревожной кнопкой.
- На команду #dw отвечает SMS с геопозицией на сайте http://www.trackanywhere.org или http://www.gps123.org. Это не совсем удобно, но можно просто скопировать линк с координатами, отредактировать и подставить цифры из него в ГуглМап через запятую. Гугл покажет красную сопельку на своей карте и надо топать к ней по своему синему кружочку-геопозиции. Даже если детализация местности будет посредственная, то можно найти место падения по приближению этих двух точек, а ближе к месту просто звонить на трекер — будет слышно за метров 20 точно, то есть супер точности в координатах не требуется.
- Автономное питание. Заряд около двух недель держит точно.
- В отличие от TL-007 имеет стандартный разъем micro-usb. И TL-007 не имеет динамика.
- При разряде в 10% шлет SMS.
- Можно настроить APN и в режиме #gon он будет слать координаты по интернету на свой сайт и потом по ID трекера и паролю можно глянуть, где был и куда летал. Дискретность точек достаточно низкая, но понять картину перемещения вполне можно.
- Встал как родной на walkera 350 pro и по габаритам и по дизайну.
Недостатки: - Очень долго ловит спутники GPS.
Особенности: - Похоже, что ловит спутники GPS только в режиме #gon. В режиме #goff определяет координаты по GSM и приходит SMS с пометкой LBS. Соответственно точность там весьма посредственная. Но срочности же online с поиском нет никакой и минут десять можно и подождать пока он определится с местом.
- Для поиска, вначале, нужно запросить координаты и определиться с местом, а там уже просто на него звонить. Звонок слышно громко и уж лучше чем пищалку.
- При покупке пары устройств можно поиграть с подрастающим поколением в WOKKI-TOKKI или использовать тревожные кнопки.
- На крышку батарей коптера пришлось наклеить пару демпферов, чтобы кнопка выключения трекера не нажималась от крышки.

В целом простое, удобное и не назойливое устройство. Покупалось тут. Там же продается совсем дешевый A8, но его брать не стоит, так как он только LBS.
upd 2014-09-15: Оказывается на форуме есть целая ветка по нему. Упс… А мужики-то не знали 😃
Описание внутренностей и кишки оттуда же, с ветки. Спасибо Алексею Сергевичу.