Activity
Регули менял. Сейчас мамба f25 по-моему. Когда были регули iflight 35A, такие циклические срывы синхры (или генерацию, уж хз) были вообще постоянно. Привязывал коптер к столу, включал акро, пробовал газовать. В результате моторы выходили на запредельные обороты, не слушая стик газа, и начинался характерный “пердеж” - звук, который давали вот эти броски 20%-80% газа, хорошо видимые на логах блэкбокса. Ок, я поменял регули на мамбу, всё нормализовалось. Протокол тот же, DSHOT300. Летал, висел, было всё прекрасно. И вот вчера прямо в полете вот такая фигня случилась. Хорошо рядом был. А второй раз на еще одном подлете, как писал в предыдущем сообщении. Оторвался от земли на 30 см, тока 21А, коптер вихляется, моторы пердят и трясутся. А перед самой посадкой, буквально через несколько секунд, всё прошло, ток нормализовался сам.
Сергей, а что конкретно было, опишите подробнее все симптомы.
Первоначально поставил лучи с ВМГ Мавика. Настраивал ПИДы и навигацию. Внезапно щелчок и коптер, крутясь волчком, летит к земле, пытаясь сохранить горизонт. При этом видно, что один пропеллер сложен и не вращается. Луч заменил и продолжил настройку. Вроде пару дней летал нормально. При настройке навигационных пидов проводил разгоны и бросал стик или тормозил для для анализа процесса остановки. В момент торможения опять остановился один мотор. Восстановил раму и поставил лучи с ВМГ Фантома. Летал несколько дней. В один из полётов заложил довольно крутой разворот с креном, и опять остановился один мотор.
Сейчас летает без проблем.
Насчёт конденсатора: стоит на полётнике, но регуль 4 в 1 включен на пятаки одного из моторов 405-ctr, через датчик тока. Напрашивается кондёр на эти пятаки, чтобы не было просадки на резисторе датчика тока. Пока не поставил, но коптер лучами подрагивает. Так что поставлю.
После первого краша привязал коптер к табуретке и гонял моторы с резкой дачей и сбросом газа, остановок не было. Первоначально думал, что мало оборотов для пропов Мавика, и в моменты сброса газа и последующего разгона пропы складывались, но то же повторилось на ВМГ Фантома.
Аналогичный случай в этот сезон. Универсальная рама со сменными лучами(с разными моторами). 2 краша на ВМГ Мавик. Один краш на ВМГ Фантом. Матек F405-ctr + ESC 4 в 1. Поменял полётник с ESC, проводить эксперименты дальше с целью определить, кто из двух виноват, охоты нет. Сейчас летает нормально.
Если чистый унитазинг(концентрические правильные круги), это всё же компас. Если перелёты с попыткой возврата по дуге, тогда пиды. Можно уменьшить POS и POSR. Но в конечном итоге это может привести к сильному снижению скорости в автовозврате. Я пошёл по другому пути: Уменьшил POS_P до 35, это не вызвало ощутимого снижения скорости в RTH (стоит 1000см/с). Зато увеличил POSR_D до 200. По сути это аналог обычного D, который убирает обратный отброс при отпускании стика. Мне помогло. На 5 и 9 дюймовых коптерах нет метаний, в RTH останавливается без перелётов. В атти тоже, если скорость не 50-60 км/ч.
Да, 2.6.1. Отлично всё летает, подошли старые настройки. Пиды обычные и GPS еще немного подкрутить надо - высоковаты.
Круиз пробовали? Может, просто у меня не пошёл?
На INav?
Значит ничего не изменилось с этим. Для очистки совести подлетну на днях и проверю. Раньше помимо крена айнав начинал колбасить коптер из стороны в сторону, что-то там компенсируя и перекомпенсируя… и это на отлично настроенных навигационных пидах. Если и они еще не настроены бы были, коптеру точно хана бы пришла.
Я просто не дописал. Сначала крен, стик обратно - он валится в другую сторону. Всё как год назад.
Пока из багов только косячный режим посхолд круиз, который раньше был забагован донельзя и попросту не работал. В новых прошивках говорят вроде лучше, но я не проверял. Еще был баг с не работающим автоопределением магнитного склонения, его приходилось ставить вручную. Про остальные баги не в курсе, не сталкивался. У меня всё работает.
Проверил Круиз на 2.6.1. Та же фигня: при повороте по Яв такой крен закладывает, мама не горюй, градусов под 90. Уже учёный, сразу в Angle переключил.
Сейчас специально подключил посмотреть: CW 270 flip. Может намагничен?
В Inav что заливаем? Я пробовал штатно через конфигуратор FLYWOOF411 - не работает третий мотор. Нашёл решение этой проблемы на Гитхабе, там выложили .hex 2.6.0.2. поправленную. Прошил её локально и всё заработало. Через конфигуратор дистрибутив не поправили? Странно.
Пробовал разными способами ПИДы настраивать, но лучший результат на тросике с помощью анализа логов. Хотя визуально тоже получается. Но после тросика 1-2 минуты полётного времени прибавлялось. На всех коптерах с визуальной настройкой Р оказывался задран и, как следствие, D тоже.
Кто-нибудь знает, какая поляризация у внутреннего патча?
Ткните в нормальный материал, по настройке пидов пожалуйста. Чтоб хоть понять, что куда крутить и что за что отвечает. Думаю не мне одному будет полезно.
Похоже Вы заходите в эту ветку только чтобы задать вопросы. На 298 странице есть действенная, работающая методика, а на 297 появлялись Вы. Пару страниц назад я отвечал, как сам настраивал Нав. ПИДы, чтобы не было перелётов и метаний.В этой ветке есть практически вся инфа для настройки коптера, только лопатить ветку за Вас никто не будет.😉
Режим MC Break работает в круизе. 1300 не ставил, на всех 1000 стоит. Начинайте с малых скоростей в нав. режимах.
Торможение при подлёте, это прошивка. Но если ПИДы навигации не настроены и рейты велики, торможение не поможет.
Недомавик, 4S1P
# master
set looptime = 500
set gyro_hardware_lpf = 256HZ
set gyro_lpf_hz = 90
set gyro_stage2_lowpass_hz = 120
set dyn_notch_range = LOW
set dyn_notch_min_hz = 80
set acc_hardware = MPU6000
set acczero_x = 56
set acczero_y = -15
set acczero_z = -216
set accgain_x = 4104
set accgain_y = 4091
set accgain_z = 4027
set align_mag = CW270FLIP
set mag_hardware = QMC5883
set magzero_x = 322
set magzero_y = -257
set magzero_z = -175
set baro_hardware = BMP280
set pitot_hardware = NONE
set rssi_channel = 16
set blackbox_rate_denom = 2
set min_throttle = 1120
set max_throttle = 1980
set motor_pwm_rate = 8000
set motor_pwm_protocol = DSHOT300
set failsafe_off_delay = 0
set failsafe_throttle = 1200
set failsafe_procedure = RTH
set align_board_roll = -2
set align_board_pitch = -6
set yaw_jump_prevention_limit = 200
set model_preview_type = 3
set disarm_kill_switch = OFF
set applied_defaults = 2
set gps_provider = UBLOX7
set gps_sbas_mode = AUTO
set mc_airmode_type = THROTTLE_THRESHOLD
set nav_use_midthr_for_althold = ON
set nav_wp_radius = 200
set nav_auto_speed = 1000
set nav_manual_speed = 800
set nav_manual_climb_rate = 500
set nav_rth_altitude = 6000
set nav_mc_bank_angle = 35
set nav_mc_hover_thr = 1350
set debug_mode = GYRO
# profile
profile 1
set mc_p_pitch = 38
set mc_i_pitch = 35
set mc_d_pitch = 27
set mc_p_roll = 38
set mc_i_roll = 35
set mc_d_roll = 27
set mc_p_yaw = 100
set mc_i_yaw = 46
set max_angle_inclination_rll = 350
set max_angle_inclination_pit = 350
set dterm_lpf_hz = 75
set use_dterm_fir_filter = OFF
set yaw_lpf_hz = 30
set yaw_p_limit = 300
set nav_mc_pos_xy_p = 35
set nav_mc_vel_xy_d = 200
set mc_iterm_relax_cutoff = 17
set d_boost_factor = 1.000
set d_boost_gyro_delta_lpf_hz = 40
set antigravity_gain = 2.000
set antigravity_accelerator = 5.000
set rc_yaw_expo = 70
set roll_rate = 45
set pitch_rate = 45
set yaw_rate = 30
Это которые где? Напомните пожалуйста…чёт не доводилось их крутить…
Position XY
Velocity XY
в табличке GPS navigation
Я начинал с малых скоростей возврата. Потом увеличивал скорость до перелётов и дёрганий. Потом уменьшал Pos P и Vel P. Далее увеличивал скорость, и так много раз. Потом, когда более-менее нормально останавливается, игрался пропорциями этих величин по-отношению друг к другу. Сейчас три коптера 5", 8" и 12" возвращаются в точку взлёта без перелётов, с торможением при подлёте. На всех скорость в нав. режиме 1000 см/с
Есть у меня одна претензия к возврату…Сколько пробовал тумблером или срабатывал сам возврат, всегда летит домой…вот только иногда прилетит к точке и пролетает её и начинает танцевать с огромной амплитудой…ХЗ, кто говорит ветер, кто ещё что…Но вроде заметил, если скорость возврата не ставить 900-1300, а 500-700 вроде как всё ОК.
Настраивается навигационными ПИДами. У меня 1000, перелётов и метаний нет. При условии, что простые ПИДы настроены.
Имел ввиду, что нет смысла ставить рейты, к примеру, 450 град/сек, на рамы 450-500мм. Закон инерции ещё никто не отменял. Приходится D задирать. Или точку держит при ветре, но очень “нервно”.
Ещё надо устанавливать адекватные рейты для соответствующих рам и веса. В противном случае ПИДами коптер вообще можно не настроить.
Отписываюсь по результатам настройки ПИДов на тросике по методике My Hobby Log. Коптеры: 5", Недомавик и на 12"
- Упал потребляемый ток примерно на 0,5А.
- т.к.перерегулирования по Р нет, D получились очень маленькие, 6-10, и при этом не отскока, как демпфер в конце выравнивания.
- 12" ПИДы Р и D остались практически как в визуальной настройке. I снизил примерно до 25. D около 35, но это не показатель. Я сдуру ему рейты поставил 400*/сек.
Кстати, какие рейты приемлемы для 12"? Висит на 40%.
Мне кажется, D не стоит так поднимать. На маленьких коптерах визуально отскок исчезал уже при 10. Точнее уже по камере. Хотя осцилляции при возврате ручки на картинке приличные. Рама тяжелая и разогналась, мгновенно не остановится. А вот P на 2-х коптерах оказался завышен в 1,5-1,6 раза. Теперь полёты, посмотрим.
Я бы еще добавил что обязательно надо настроить логический переключатель так чтобы при его срабатывании значение roll скакало в максимум.
Вот спасибо! Попробовал на тросике. Красивая и информативная картинка.
Перестал включаться X-Lite. Помогло извлечение и установка батарейки на основной плате. Это тревожный признак? Ждать ли повторов?
На всех Matek F405 CTR. Арду я не знаю, может и попробую. А INav просто нравится, не смотря на некоторые баги.
Было и 25, и 30. Я Круиз пытаюсь с мая добить. Эти его спонтанные наклоны при поворотах и разворотах достали в абсолютно разных конфигах(ПИДы, простые и навигационные, рейты, всё менял). Забил. Летаю в Атти или Angle Althold.
Кстати, на 5" коптере, где по логам всё чудненько насчёт вибраций и флаттера, тоже, при поворотах и разворотах крен сам закладывает в круизе под 45 градусов.
Может медленно Круиз и будет работать, но мне так не надо.
35 градусов.
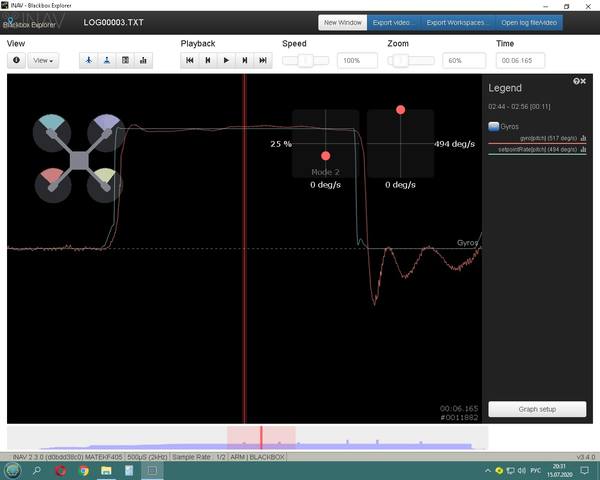
Прошу прощения. Сейчас полетал. Вибрации от моторов в логах незначительные. А вот по Gyro raw Z сигнал сенсора модулирован 16Гц. Похоже флаттерят дико эти подделки пропов мавика. Отсюда и волны на видео.
Но при этом управляется и ведет себя адекватно.Фильтры:)
По вибрациям я бы не сказал. Логи смотрел до и после этого, всё писалось. Сплит в печатном корпусе просто прикручен к карбону на стяжку. Отсюда и желе. Тот же маршрут сразу же на новой батарейке в атти - всё прекрасно. Специально ещё по роллу дёргал по-прямой и в поворотах. А вот пропы-клоны мавика флаттерят, это да при резких эволюциях и даче газа.
Вы говорите,что круиз подходит для медленных полетов. А с какой скорости начинаются проблемы? В чем они выражаются?
При непродолжительных пролётах круиз вроде работал адекватно. После 1,5км полёта(скорость около 35км/ч) получилось то, что в посте #11765. Вы в этой теме выберите все сообщения DiscoMan. Он Круиз долго настроить пытался. В результате я от него тоже отказался. А так, да, по прямой курс держит хорошо.
В Attitude при включенном Альтхолд высота прекрасно удерживается.
Теперь так и летаю)). Ещё немного помучаю торможение в атти, не всегда нравится, как останавливается.
Пытался победить Круиз. И, вроде, небольшие пролёты не преподносили сюрпризов( долго игрался комбинацией POS_P-VEL_P). Даже клевать носом перестал. А тут такое:
…google.com/…/1qfSF4XKoaL-jjiw51ImGNJViNwzirPIQ?us…
Это при попытке плавного разворота по YAW. А в пикирование сорвался вообще при отпущенном правом стике. Спасся переключением в ANGLE. Далее наклон вправо был стиком, ручками.
Сплит просто привязан стяжкой, без виброразвязки. INAV 2.3.0
Я тоже снимал антенну, для измерений и подгонки. Снимал аккуратно, подцепляя с 2 сторон. И всё равно кольцо разъёма стало шататься. Залил термоклеем, пока работает. Разъём там никакой.
какую команду ввести теперь?
У меня GYRO стоит.
Да, response нет. Ничего не могу сказать. Есть с расширением .gps, .gpx. А сделайте get debug в cli.
Как так? У меня TXT. После обработки в папке Tmp. несколько файлов: эксель, картинка шумов, картинка response…
Летаю на 2,4. Сегодня 2 часа мучил навигационные пиды. Пробовал менять по очереди нав. пиды и ограничение скорости в авто и мануал(для круиза) режимах. Первоначально настраивал всё это в режиме RTH. Первоначальная цель - добиться четкого возврата домой без перелётов и осцилляций на максимально возможной скорости. Коптер на мавиковской ВМГ. Наблюдения такие:
- при max auto speed=1200 см/с приходится занижать POSP до 15. При этом к точке подходит неуверенно и медленно, если есть ветер, парирует его так же.
- если понизить max auto speed до 1000 и поднять POSP до 20, становится гораздо лучше. И летит быстро, и останавливается четко.
- при 1200 см/с и Р=20 перелёт, круги.
- POSR пробовал мнять от 50 до 20. Лучше всего получилось при 35.
- POSR D не трогал, батарейки кончились
После этих настроек переключился на круиз: - поставил ограничение скорости 800 см/с. Пролетел при боковом ветре про прямой 800м через поле, разворот и обратно. Ведёт себя адекватно, после разворота на 180 кренов нет. Но, зараза, клюёт при стике вперёд до отказа. Немного прибрал питч, клевки прекратились. А так летит без сноса, ветер парирует наклоном по роллу.
Пролопатил ветку на предмет комментов IShadow. Он ещё в 16 или 17 году писал, что при скорости в нав режимах 10м/с и выше возможны проблемы. И где-то ссылался, что Лойтер в арду по умолчанию ограничен 5 м/с. При такой скорости в круизе и у меня нормально было.
Про Атти: - после настройки нормального поведения в RTH режиме в Атти пробовал резко бросать стик - перелёт, круги. Если стик отпускать плавно, нормально останавливается. Впечатление, что остановка коптера в RTH и остановка при Атти происходит по разным алгоритмам. При RTH он летит быстро, но при подходе к дому метров за 8 плавно сбрасывает скорость. В Атти всё быстрее и жёстче. Может в RTH в алгоритме и реализована как бы имитация плавного отпускания стика.
Может что не так делал - поправьте))
И как результаты?
Крестик делали полную длинну на Лямбда? По идее должно работать на 1/2 Лямбда 1280, нет? Посто он пишет про лямбда, а в последних сообщениях темы кому-то считал добавочный отрезок уже для 1/2.
Так IBCrazy постом ниже в теме на Rcgroups доработал его, добавив к режекторному отрезку ещё отрезок кабеля, чтобы получить 1/2 волны на рабочей частоте. Как раз чтобы снизить КСВ. Конструкция типа “крест”, подобные TBS продаёт на стеклотекстолите.
www.rcgroups.com/forums/showpost.php?p=23093094&po…