Activity
сейчас скачаю, гляну.
В общем скачал, но подключиться так и не смог ((

Какое действие у вас стоит в МП при разряде батареи?
Я к МП подключался только один раз и очень давно, сейчас скачаю, гляну.
Rx1012 хороший дешевый приемник
Спасибо за помощь, буду думать.
Не хотелось бы вас растраивать но это вся беда от этого приёмника, очень много раз обсуждалось на этом форуме об его глюках , вам срочно надо поменять его пока совсем не разбили аппарат. На любой кроме 703,705.
Можете посоветовать какой-то проверенный, надежный приемник? И может есть способ как-то продиагностировать, чтоб быть точно уверенным в глюке приемника?
Приёмник который принимает сигнал от пульта Devo F7. От него уже передаётся в контролер. Какая модель.
Похоже Devo RX703A

Какой приёмыш стоин случайно не 703.
Не силен в терминологии, что значит приемыш? Пульт? Пульт Devo F7
Все привет, у меня так и не наладилась работа коптера, после последнего мною описанного крэша - rcopen.com/forum/f135/topic361315/10003, ничего не изменилось. Изучив вопрос калибровки, сделал все по инструкции, и готов был взлетать. Взлетел, но не на долго.
Очень расстраивает эта ситуация, что-то с ним явно не так, вот только что именно? Я уже не знаю что делать с этим коптером.
На видео заснял его очередной крэш
www.youtube.com/watch?v=iIjI4NPCTJY&feature=youtu.…
Посмотрите пожалуйста и подскажите, что делать, как заставить его стабильно летать?
Вот как раз в Вашей инструкции в п 6.6 и написано в переводе “Пожалста переподсоедените разьем питания модели после калибровки”. Красным- докалибровка происходит в первом полете при висении.
Капец… реально… вот это я молодец, очень внимательно читал… Так что теперь скажете, возможны мои проблемы из-за неправильно калибровки?
Описание моей проблемы здесь rcopen.com/forum/f135/topic361315/10003
Есть общая для АПМ рекомендация, при первом полёте коптер должен постоять, после 3d fix какое то время, до 4-5 минут и только после этого рекомендуется делать арминг. После калиброаки компаса, апм необходимо перезагрузить. Что он там докалибровывает в полёте непонятно. Может в прошивке 1.5-1.7 китайцы допилили что то? Хотя я сомневаюсь… Алексей Козин , или Narazana , я думаю , смогли бы пролить свет на эту загадочную надпись. А у кого то есть этот мануал?
Извиняюсь за качество. Вот фотка с инструкции которая была в комплекте. В ней указана калибровка по четырем осям и красная надпись с низу

Никаких калибровок в воздухе АПМ не делает и не завершает! Не чудите. И зачем Вы постоянно калибруете компас??? Вы что, каждый раз летаете за 70-100км от предыдущего места?
У меня теща в Старой Каховке живет, наверное надо собираться к ней в гости, и договориться с вами о встрече для мастер-класса, если вы конечно не против?
Brd24- Вы после калибровки компаса на земле питание перевключали перед взлетом как требует инструкция?
в инструкции не сказано что надо выключать питание после процедуры калибровки.
Это вы где такое прочитали? Нужно подключить акк, если нужно откалибровать компас, а потом можно подождать пару минут, чтобы больше спутников поймалось. В момент разблокировки движков пишется точка “дом” и при RTL коптер будет возвращаться в эту точку. И если она записана не правильно, то коптер и лететь будет не туда.
Я же не про возврат домой говорю, а про калибровку. Красным написано.

Посидел, немного повспоминал, а может происходить такой глюк из-за неправильно выбранного канала для трансляции с gopro? Там ведь в настройках монитора на пульте можно выбрать один из 9 каналов, если я перепутал канал, это ведь может негативно влиять на стабильность?
Мне вот здесь не совсем понятно. Какую калибровку вы завершаете на высоте 4-5 метров???
немного не правильно выразился, просто по инструкции надо сделать калибровку, поднять коптер, включить его в режим Gps и подождать минуты три для завершения калибровки, потом можно летать или посадить, и в момент когда вы заблокируете движки данные калбировки запишутся. Как-то так в инструкции написано.
По симптомам похоже на забивание сигнала от пульта к коптеру. Только менять аппу или на стоковой летать там, где нет помех.
А какой-то сброс всех настроек или что-то такое не помогает в таких случаях? И что по вашему глючит, пульт или коптер?
Добрый день, в очередной раз у меня возникла проблема, суть в том что коптер летал вроде нормально, я отснял последнее видео и поставил его на неделю на полку.
Спустя неделю попросили снять старт велопробега, и тут у меня случился крэш. Да, я не сделал калибровку перед полетом на новой местности, но поведение копетра больше были похожи на какие-то помехи. Вокруг было много велосипедистов и у многих были рации, не знаю, могли они парить сигнал? В общем коптер рухнул, но получил не критические травмы, немного подломил ранее “залеченные” ноги.
Собрав коптер до кучи я приехал домой, вновь полечил ему лапки и пошел во двор тестировать. Откалибрировал, поднял на метров пять, включил режим gps и он довольно стабильно завис. Я немного полетал и он сел сам из-за низкого заряда аккумулятора. Взял другой аккумулятор, опять проделал калибровку и поднял в небо. Вновь все хорошо и стабильно.
Тут меня попросили снять с воздуха одну площадку, которая находится в окружении девятиэтажек, не далеко от того места, где он упал при старте пробега велосипедистов. Приехал, собрал коптер, подцепил подвес с видеотрансмиттером, подключил gopro, откалибрировал и начал взлет. Поднял на 4-5 метров, и заблокировал в gps чтоб он завершил калибровку. Но не тут то было, с ним начались те же симптомы, которые я наблюдал при старте велопробега. Недолго думая он стукнулся об землю. Я поменял акк, перекалибрировали и снова поднял. На месте он не висел, его колбасило. Я его посадил, перезагрузил и решил еще раз откалибрировать, но при сведении стиков, он не заходил на постоянное мигание, а мигнул раз пять и перестал. Еще раз свел стики - начал мигать стабильно. Я пытался несколько раз его поднять, но он так и продолжал вести себя в воздухе не стабильно. Для теста я отключил трансмиттер, но это не помогло.
Суть вопроса вот в чем - я уже очень устал все время бояться за коптер, бояться его разбить. Мне кажется что с ним что-то не так, и ему нужна профессиональная диагностика и настройка. Посоветуйте какой-то пошаговый тест, в котором я смогу убедиться в его работоспособности.
И еще вопрос по аккумуляторам, у меня их два, но они оба уже вздулись слегка, их можно списывать или не только у меня такая ситуация? Как проверить работоспособность батареи, и какие она должна показывать параметры тока?
Всем спасибо.
Все привет, на выходных немного заснял видео на Бердянской косе, посмотрите пожалуйста видео, и покритикуйте. Спасибо.
не обижайтесь на форумчан
Да ни в коем случае, на что обижаться, мы тут все (100% форумчан этой ветки) взрослые люди, все всё прекрасно понимают.
У DJI есть такой режим Курс лок. Работает так же, только послушно, и сам не включается. Что с ним делать? Почему он, вместо Стабилизации?
У меня тоже когда-то такая проблема была, задавал вопрос здесь на форуме, но ответа так и не получил. Вернул нормальный полет только когда сделал все в соответствии с этими настройками



Посмотрите пожалуйста видео, коптер в режиме лойтер - это нормальное состояние, или должно быть стабильнее?
Вопрос в том, как ее задействовать или хотя бы убрать идиотскую установку на включение/выключение камеры при повороте крутилки управления подвесом?
У меня с подвесом шла вот такая бумажка, в которой описаны настройки в меню “device output” под пульты Devo 10 и Devo F7, проверьте, может у вас что-то не так выставлено?
Она включат запись видео
К примеру у меня камера гопро, я ее включаю на запись перед стартом и выключаю после посадки, ни разу не пробовал с пульта управлять этим процессом, да и не думаю что получиться.
Ребята, подскажите пожалуйста, какое значение должно стоять у пульта Devo f7, по умолчанию, в пункте Model menu > Device select > Flight switch: Inhibit, FMOD SW или MIX SW ? Промахнулся с пунктом и ткнул пальцем не глядя… ((
У меня так

Нужен дельный совет
В очередной раз пытался заснять видео с коптера, но полет совсем не стабильный получается, я уже понял что во время съемки подруливать не стоит, и не подруливаю. Но если вы посмотрите видео, то такое чувство, как будто я постоянно корректирую полет.
Уделите время, посмотрите пожалуйста, посоветуйте как лучше снимать, как избавиться от тряски и подруливания.
Калибровку проводил по четырем осям, но в режиме Loiter он не стоит на месте, его качает из стороны в сторону и это практически при нулевом ветре.
Может вся проблема в калибровке?
Видео снималось на месте где с коптером был впервые, калибровку перед полетом не проводил.
Разобрать пульт и смотреть из-за чего залипает.
ну он залипает на аппаратно а программно. На что обратить внимание при разборе?
Насколько я понял из ветки форума, пульта devo f7 не особо надежная техника, так получилось и у меня.
В последнее время при включении пульта всегда надо было идти в меню чтоб посмотреть, не залип ли правый стик, и почти при каждом включении он был залипшим вправо. Т.е. монитор показывал что на данный момент производится полет в правую сторону на 100%.
Приходилось некоторое время, бывало и по 10 минут, агрессивно дергать стик влево и вправо чтоб значение наконец отлипло. Как только цель была достигнута, пультом можно было пользоваться в обычном режиме… до сегодняшнего дня.
День сегодня был особенный тем, что я наконец получил трансмиттер tx5803 и хотел ощутить, что же такое ФПВ. При взлете, попытавшись отвести аппарат немного вправо, его просто швырнуло на полной скорости в дерево, причина - залип стик… По итогу сломаны две ноги, вроде кое как вылечил.
Завтра буду пробовать опять летать, но хотелось бы совета, что мне сделать с пультом, как побороть залипание?
Видео крэша
На Валкере вместо iLook+ уже ГоПро3, передатчик 2 Вт боскамовский.
А можете немного подробнее про подключение гопро для FPV? Интересует какой трансмиттер и где брали, и при работе в режиме fpv гопро может транслировать на экран и записывать видео одновременно? И еще, большая ли задержка при трансляции?
а я вот теряюсь или 350 взять или фантома 2
Ну мне кажется что фантом на много проще, там на пульте всего “три кнопки”, и вроде не надо делать калибровки компасов и тд., купил и полетел, тут же, как читаешь ветку по валкире, прозреваешь с проблем с которыми люди сталкиваются, причем в основном на ровном месте. Но кстати, пару месяцев назад видел объявление на мариупольском сайте об улетевшем фантоме…
спасибо! ну а вообще в симуляторе учились летать? и в них есть автопосадка…если вдруг чтото начинает идти не так можно ли будет просто выключить пульт? он автоматически сядет?
Нет, никаких симуляторов не использовал, пытался на планшет игрушку скачать, но не понравилось. Выходил на полянку, и потихоньку тренировался, когда стало уверенней получаться запускал уже во дворе (частный дом).
Все время летаю не теряя из виду аппарат. У меня к подвесу крепится гопро, а трансмиттер для FPV я так и не купил, понять что такое смотреть в экранчик и лететь возможности пока не было.
А по поводу посадки, когда летал на полянке, если понимал что не могу его вернуть обратно (ну были такие моменты) просто переключал на возврат домой и все, пульт не вырубал, как-то стремно )))
ну а вообще в плане управления есть кто сразу купил себе первый раз Walkera QR-X350 Pro и более менее полетел без краша? был просто печальный опыт с вертолетами!
Купил в начале осени - это первый мой летательный аппарат, еще ни одного крэша не было. Главное не паниковать если что не так пойдет, и все будет ок. Было пару случаев когда адреналин зашкаливал. По незнанию были проблемы с типами управлений, но теперь все ок, одно наслаждение 😁
Вопрос к опытным пилотам
При какой максимальной скорости ветра вы летали? А вообще, валкира рассчитана на полет при какой максимальной скорости ветра? Спрашиваю потому что у на в Бердянске постоянно ветра 10-15 м/с - при таком ветре летать очень тяжело, особенно загонять аппарат на посадку.
у меня на 700 метров по ветерку, но потом очухался и вернулся.
- я тоже думал что он очухается и вернется к работе, простоял на земле в “мигающем” состоянии минут 15, но из этого режима так и не вышел. Такая проблема была уже раза четыре. Вот я и боюсь, что если подобное произойдет над морем, то придется либо бежать в воду с надежной поймать в руки при приземлении, либо наблюдать издалека за последней посадкой ))
Бывает такая штука - иногда мне надо сделать снимки с воздуха, для этого я использую камеру гоупро, модуль под Gopro для FPV еще не приобрел, поэтому смотрю в планшет или телефон который по wi-fi связан с камерой, выбрав нужный момент, делаю снимок, и вот иногда бывает что коптер просто перестает реагировать на пульт и начинает в тупую садиться, при этом левый индикатор из режима “горения” (разблокированные моторы) переходит в режим мигания.
После того как коптер сам по себе сядет, достучаться до него можно только переподключив батарею - вопрос:
- это срабатывает так называемый “фаилсейв”?
- а это поведение коптера является конфликт частот коптера и вайфая на гопро?
- означает ли это что при подключении гопро через FPV - коптер будет периодически продолжать тупить в том же духе?
Подскажите пожалуйста две вещи:
- Если коптер упадет в Азовское море (вода соленая) то шансы реанимировать есть, или аппарат выбрасывать на свалку?
- На пульте Devo f7 есть возможность видеть силу заряда батареи на коптере, и на каком значении коптер будет думать что батарейка села?
В общем с направлением полета при помощи тангажа немного не вышло, но все из-за того, что летал в режиме лойтер, когда понял что лойтер все время старается корректироваться, уже было поздно, обе батареи посадил, да и солнце почти село. Что в итоге получилось, можете увидеть в видео.
Буду рад конструктивной критике.
Ну у вас на пульте есть маленькие переключатели, это и есть триммера. Для каждого стика их два.
Другой вариант - через меню пульта, завязать на тумблер. Но на данном этапе это для Вас будет сложнее.
Точно! Спасибо!!! Это то что нужно! Я сам этими переключателями выравнивал аппарат, и совсем не подумал что ими же можно и настроить улет в нужном направлении.
По поводу “завязать на тумблер” - если не тяжело, то расскажите пожалуйста, как это сделать?
А поправку на ветер, кто будет делать?
Ну, думаю если ветер будет до 5-6 м/с ничего страшного не произойдет.
потом триммером по тангажу задал ему скорость полёта
Честно, в терминологии еще не разобрался, и вообще не понимаю как это “триммером по тангажу” 😃
В очередной раз попробую получить здесь ответ на несколько вопросов.
Вот есть функция Geo Fence - кто ею пользуется? Если пользуетесь, то какие значения у вас вбиты и почему?
Второй вопрос такого плана - можно как-то настроить переключатель fmod, или любой другой так, чтоб при включении коптер двигался вперед либо влево либо вправо. Для чего это нужно - хочу на лиманах ехать не велосипеде, а коптер чтоб летел за мной или сбоку (если будет лететь влево или вправо) - ответ “настрой режим Follow Me!” - не подходит. Интересует просто настройка переключателя. Просто подумал, раз легко можно настроить уровень газа на дрсвич, то почему нельзя настроить силу направления?
Ну и напоследок, немного моего полета.
Судя по картинке у Вас выключен пульт 😃
а как должно выглядеть приложение при включенном пульте? Если не тяжело, можете ваш скрин прикрепить?
В меню пульта main menu ->> model menu ->> device output ->> в меню flap поменял настройки на fmod sw - и он полетел в стабилайз моде. Мне просто повезло или эти настройки действительно на это повлияли?
подключение к МП многое бы Вам объяснило.
Судя по картинке, у меня включен режим Stabilize Mode?
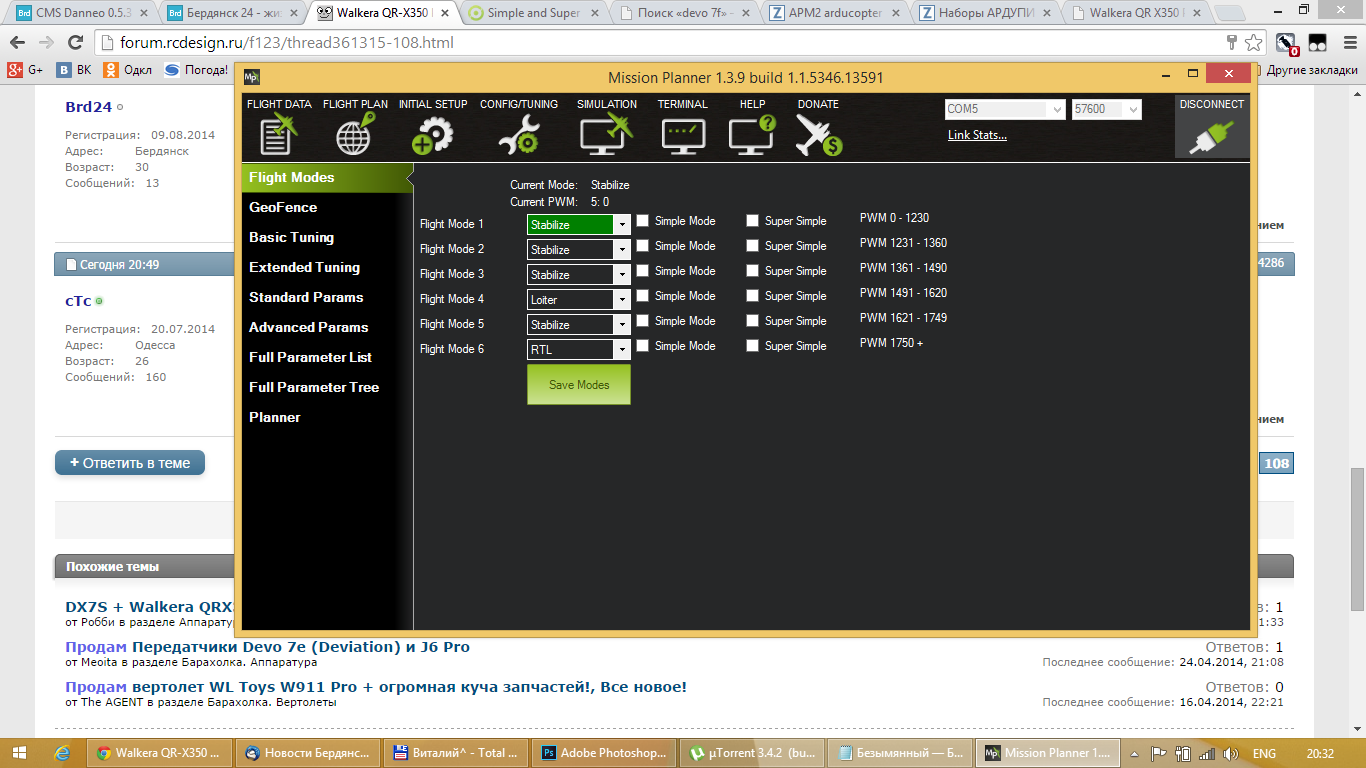
Только что поднимал коптер, и он все еще остается в режиме симпл мод. Ну что делать, подскажите??
Вопрос переключения режима управления из Simple Mode в Stabilize Mode - остается открытым. Выключение и включение не помогает. К программам типа ардупилот и миссион планер никогда не подключался. Рубильник FMOD изменений в полет не вносит.
Может в пульте надо что-то переключить? Помогите пожалуйста.
Включайте пульт, только когда все тумблера в положении “от себя”.
Т.е. режим Simple mod выключен, когда тумблер FMOD в нулевом положении.
Да вроде так и делаю. Но я так понимаю, если во время полета дернуть тумблер FMOD, то аппарат перейдет в режим симпл, и вернуть его обратно во время полета не получится?